Aujourd'hui le sujet du test sera un driver de moteur pas à pas: le TB6560.

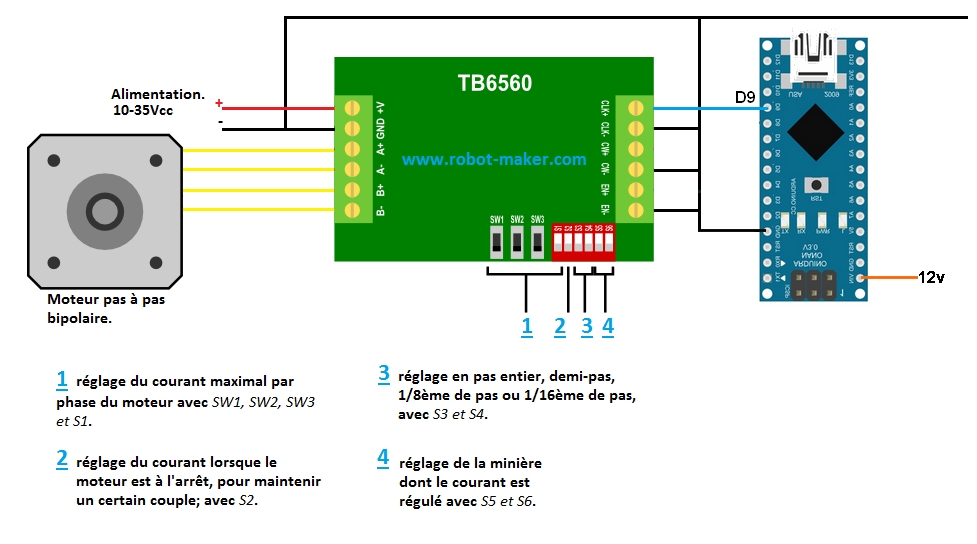
Sortie de son emballage, on lit facilement sur la carte comment la connecter. Elle possède des interrupteurs pour faire différents réglages et 4 petits tableaux sur la carte indiquent la fonction de chaque interrupteur, pas besoin de sortir le datasheet (
 Tb6560 stepping motor driver ...pdf 55,52 Ko
2873 téléchargement(s)) toutes les 2 minutes! ^^
Tb6560 stepping motor driver ...pdf 55,52 Ko
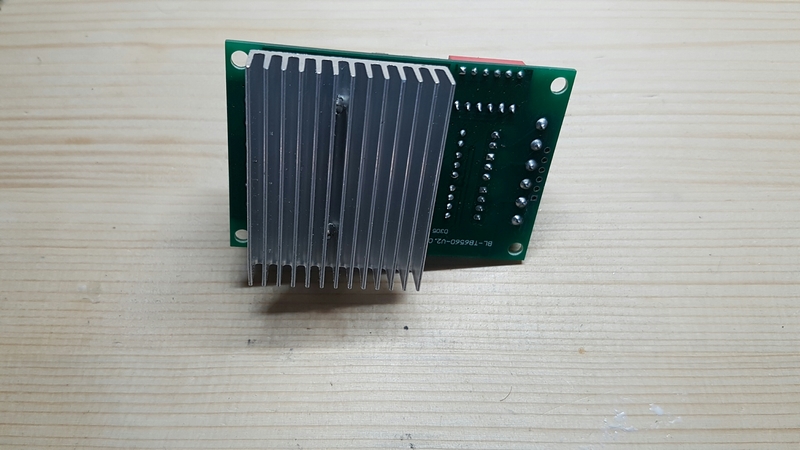
2873 téléchargement(s)) toutes les 2 minutes! ^^Le driver possède un gros dissipateur thermique, qui lui sera utile si on le pousse dans ses limites!
Câblage:
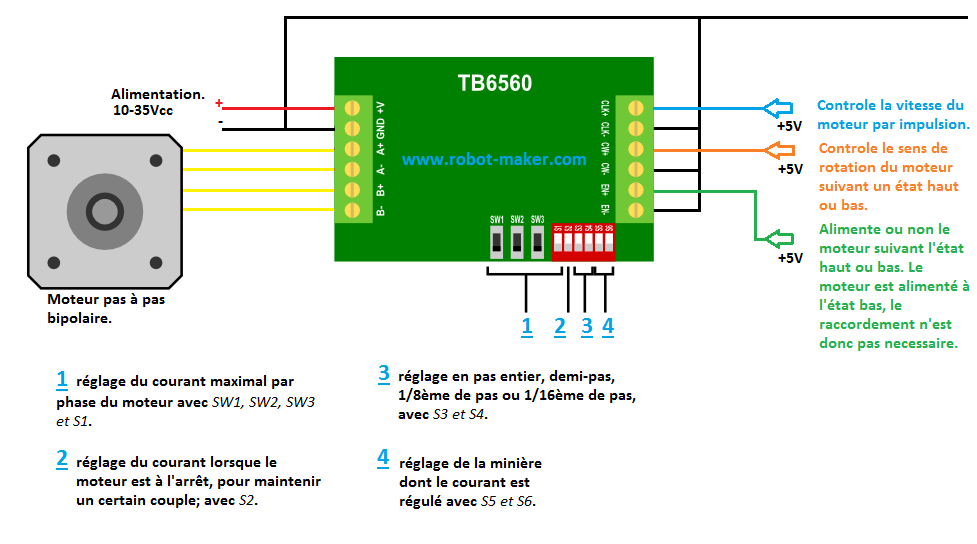
Le câblage de la carte est simple, le moteur et l'alimentation d'un côté, et de l'autre côté 3 entrées pour contrôler la carte. Vous pouvez choisir la vitesse du moteur, son sens de rotation et l'entrée EN+ qui sert à activer ou non le moteur.
Fonctionnalités:
"Stop current": cette fonction permet d'ajuster le courant envoyé au moteur pour maintenir sa position. Vous avez le choix entre 20% et 50%.
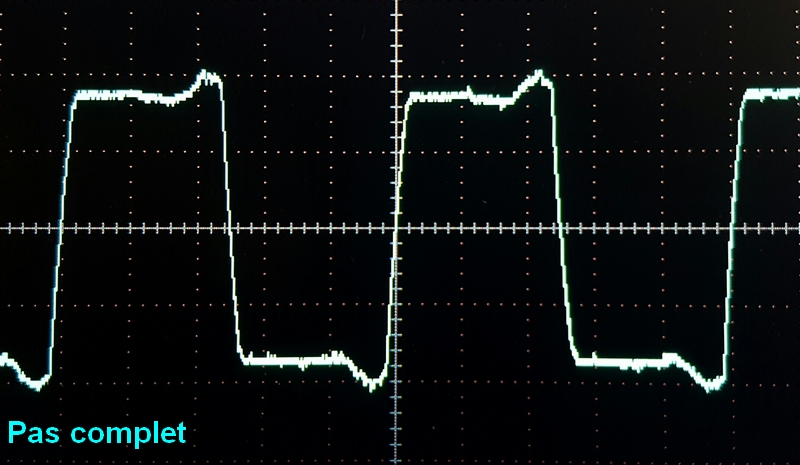
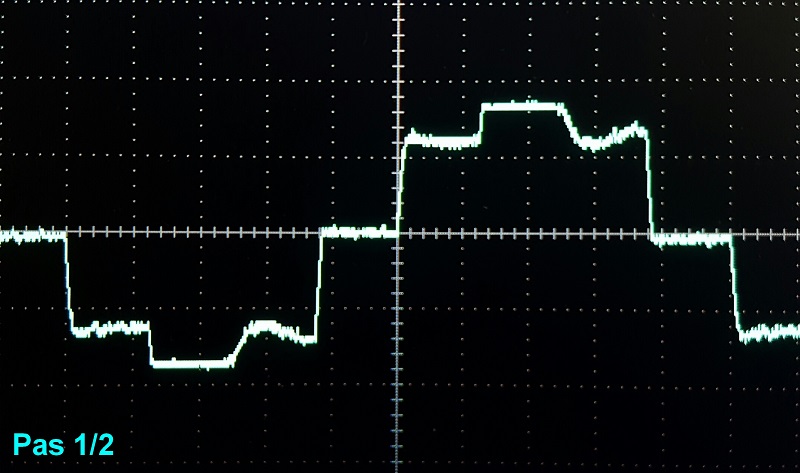
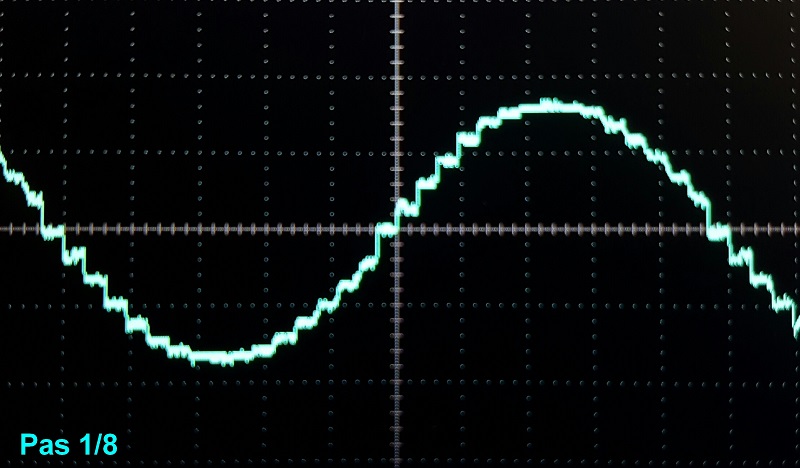
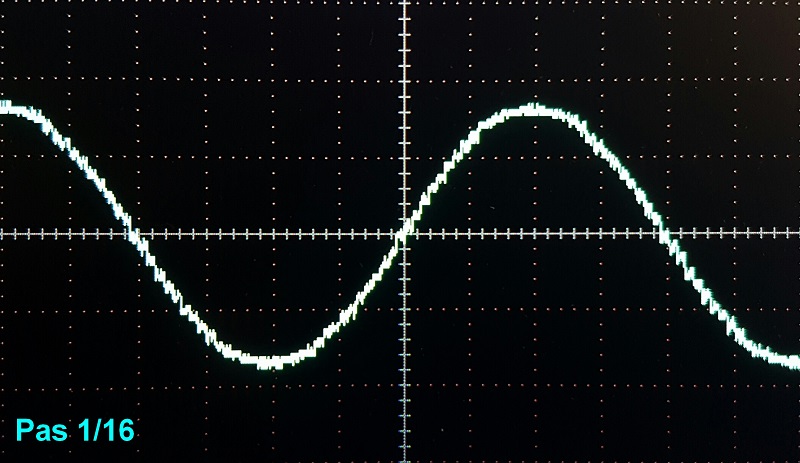
"Excitation Mode": vous choisissez le control des pas du moteur. Pas complet, demi-pas, 1/8 pas et 1/16 pas.
Ce mode permet plusieurs choses dont atténuer les vibrations en lissant le courant.
Spoiler
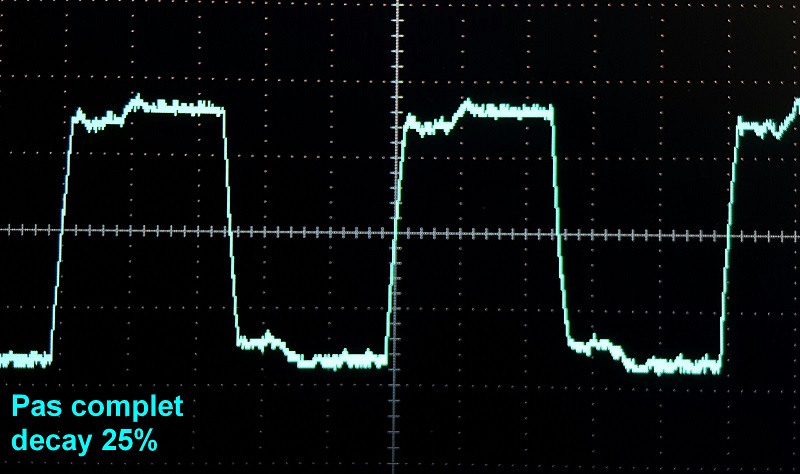
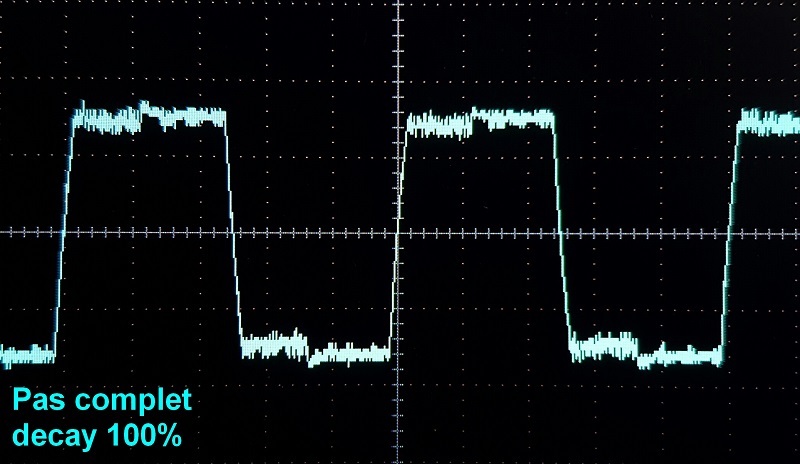
"Decay setting": cette fonction permet de changer la façon de réguler le courant dans le moteur. J'ai trouvé le réglage 0% et 25% plus silencieux que les 2 autres.
Spoiler
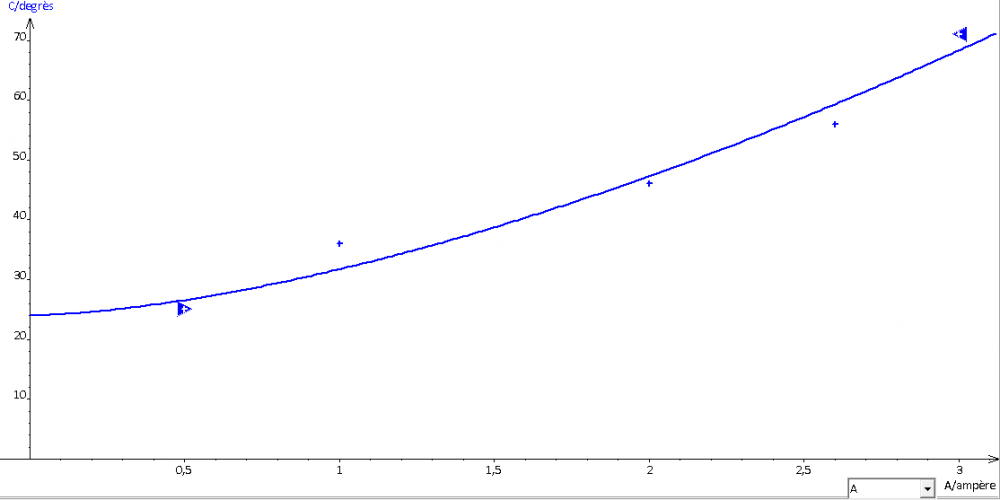
Pendant le test j'ai relevé la température du dissipateur par rapport aux intensités:
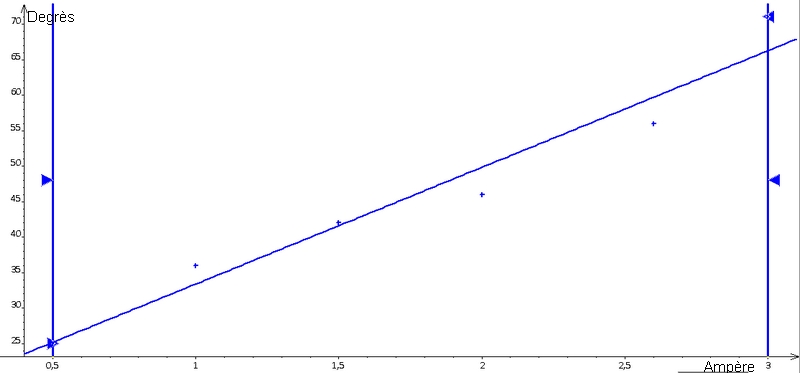
Il peut atteindre les 70 degrès donc ne pas l'enlever !
Le driver à été testé pendant environ 2h, le temps que les mesures de température se stabilisent.



 par contre je n'utilise pas de code. Pour la fréquence j'ai fait un oscillateur avec un ne555. Mais je peux aussi faire un test avec une arduino si tu veux ^^
par contre je n'utilise pas de code. Pour la fréquence j'ai fait un oscillateur avec un ne555. Mais je peux aussi faire un test avec une arduino si tu veux ^^