Salut Oracid, je me présente bazmarc, de Montreal.
Très fort tes vidéos muet  et j'adore le style de tes robots LEGO!
et j'adore le style de tes robots LEGO!
J'ai partagé sur le groupe Facebook de la communauté MINDSTORMS https://www.facebook...legomindstorms/
Au plaisir de te rencontrer IRL un jour peut-être 
A+
http://bazmarc.ca
(lien fixé -- R1D1)

Lego - EV3 - Un petit char articulé
Débuté par Oracid, sept. 18 2016 06:28
50 réponses à ce sujet
#41

bazmarc
-

- Membres
- 1 messages
Nouveau membre
Posté 13 novembre 2016 - 03:05
#42
Oracid
-
- Modérateur
-

- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 13 novembre 2016 - 07:50
Merci Bazmarc.
je suis un dinosaure, je n'ai pas de compte Facebook, mais j'ai bien vu ton petit mot, c'est sympa.
Jorge fait partie de mon "fan club" à Lisbonne, nous échangeons de temps en temps sur son forum, http://www.plug.pt/forum/index.php?board=23.0
Mais il n'a pas tout à fait raison, c'est bien aux Amériques que j'ai le plus de succès.
Ton contact sur Facebook est une drôle de coïncidence, cette nuit, j'ai dépassé les 1000 abonnés à ma chaine YouTube.
Pour moi, cela est quelque chose d'incroyable que je n'imaginais pas il y a à peine quelques mois.
De savoir que toutes ces personnes vont recevoir un mail lorsque je posterai ma prochaine vidéo me gratifie énormément, mais me stress également de peur de décevoir.
Je vais regardé ta page Facebook d'un peu plus près, cela à l'air très intéressant.
Dommage ton dernier lien ne fonctionne pas.
je suis un dinosaure, je n'ai pas de compte Facebook, mais j'ai bien vu ton petit mot, c'est sympa.
Jorge fait partie de mon "fan club" à Lisbonne, nous échangeons de temps en temps sur son forum, http://www.plug.pt/forum/index.php?board=23.0
Mais il n'a pas tout à fait raison, c'est bien aux Amériques que j'ai le plus de succès.
Ton contact sur Facebook est une drôle de coïncidence, cette nuit, j'ai dépassé les 1000 abonnés à ma chaine YouTube.
Pour moi, cela est quelque chose d'incroyable que je n'imaginais pas il y a à peine quelques mois.
De savoir que toutes ces personnes vont recevoir un mail lorsque je posterai ma prochaine vidéo me gratifie énormément, mais me stress également de peur de décevoir.
Je vais regardé ta page Facebook d'un peu plus près, cela à l'air très intéressant.
Dommage ton dernier lien ne fonctionne pas.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#43
levend
-

- Membres
-
- 5â¯680 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 13 novembre 2016 - 05:01
bazmarc, je vais être sympa parce que cela fait plaisir de voir des Québécois sur Robot Maker, mais tu dois tout même passer par la case présentation .
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#44
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 17 novembre 2016 - 02:30
J'abandonne l'idée des bras articulés.
Les contraintes sur les bras dans les virages ou dans les demi-tours sur place sont trop importantes.
Je vais partir sur une autre structure.
Mais je n'abandonne pas l'idée d'une structure articulée ou transformable.
Les contraintes sur les bras dans les virages ou dans les demi-tours sur place sont trop importantes.
Je vais partir sur une autre structure.
Mais je n'abandonne pas l'idée d'une structure articulée ou transformable.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#45
levend
-
- Membres
-
- 5â¯680 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 17 novembre 2016 - 03:03
Dommage, j'aurais bien voulu voir le bras articulé
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO


#47
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 17 novembre 2016 - 07:29
C'est sûr que ça avait de la gueule, mais l'esthétique à des raisons que la mécanique ignore...Dommage, j'aurais bien voulu voir le bras articulé
Le problème, c'est que mes chenilles sont trop efficaces et accrochent bien le sol.
Même avec des grandes Turn-tables, le bras de levier est trop important et les servos bloquent, heureusement qu'ils sont protégés contre un couple trop élevé.
Mais vous verrez ma nouvelle solution vous plaira, de plus elle est innovante. Dès que l'idée est validée, je vous montre ça.
Mais ça aura moins de gueule, ça c'est sûr.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#48
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 21 novembre 2016 - 12:20
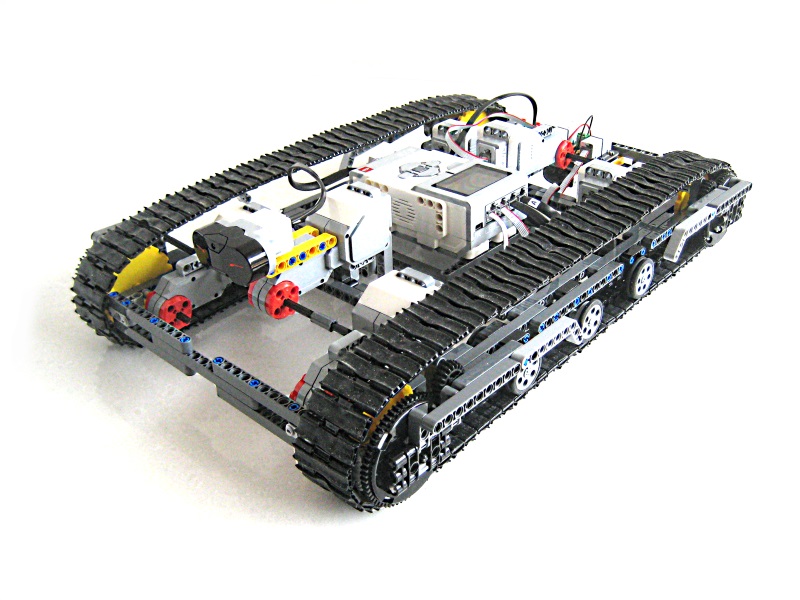
Voici ma nouvelle version.
L'idée, c'est de réduire les petits bras à leur plus simple expression. Ici, j'en ai fait de simples petits patins.
L'objectif de ces patins est de passer le nez de marche et de soutenir le char sur 3 nez de marche.
Je pense que cette idée est novatrice et j'espère que cela fonctionnera.
Comme d'habitude, je vous propose mes idée avant de les tester. Je pense que cela rend le sujet plus vivant et crée du suspens.
Les petits bras précédents, tenus à la turn-table par une extrémité, généraient un couple de torsion beaucoup trop élevé sur leur attache.
Les 3 photos montrent le char avec ses petits bras plus ou moins déployés et fermés.
Nouveaux paramètres :
Poids 1680g
Longueur 44cm, déployé 63cm
Largeur 31cm
Hauteur 10,5cm
6 gros servomoteurs
1 pile 9V
1 EV3


L'idée, c'est de réduire les petits bras à leur plus simple expression. Ici, j'en ai fait de simples petits patins.
L'objectif de ces patins est de passer le nez de marche et de soutenir le char sur 3 nez de marche.
Je pense que cette idée est novatrice et j'espère que cela fonctionnera.
Comme d'habitude, je vous propose mes idée avant de les tester. Je pense que cela rend le sujet plus vivant et crée du suspens.
Les petits bras précédents, tenus à la turn-table par une extrémité, généraient un couple de torsion beaucoup trop élevé sur leur attache.
Les 3 photos montrent le char avec ses petits bras plus ou moins déployés et fermés.
Nouveaux paramètres :
Poids 1680g
Longueur 44cm, déployé 63cm
Largeur 31cm
Hauteur 10,5cm
6 gros servomoteurs
1 pile 9V
1 EV3
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#49
Bobox
-

- Membres
-
- 157 messages
Membre occasionnel
- Gender:Male
- Location:Montigny le Bretonneux
Posté 21 novembre 2016 - 01:09
Interressant.
Est-ce que ton petit bras sera suffisant pour soutenir le bout du robot en suspension ? Il semble petit en proportion de la bete.
Sinon tu controles comment les 6 moteurs avec un seul ev3 ? Tu as une une borne d'extension ? Et la programmation tu l'as fait avec l'outil de Lego ou tu as installe ev3dev dessus ?
#50
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 21 novembre 2016 - 02:32
Les tests diront si cela fonctionne. Je suis moi même inquiet et ta remarque est pertinente, mais dans mes réalisations, le poids est un critère très important.Interressant.
Est-ce que ton petit bras sera suffisant pour soutenir le bout du robot en suspension ? Il semble petit en proportion de la bete.
Sinon tu controles comment les 6 moteurs avec un seul ev3 ? Tu as une une borne d'extension ? Et la programmation tu l'as fait avec l'outil de Lego ou tu as installe ev3dev dessus ?
Ici, le char fait 1680g, soit 420g pour chaque bras, c'est vrais que c'est beaucoup.
Mais ce qui m'inquiète, ce ne sont pas les petits bras, mais les servos qui les commandent. Remarque bien, le grand axe qui traverse le servo sur toute la largeur du char et dont les extrémités sont reliées aux 2 turn-tables sur lesquels sont fixés les petits bras.
Si chaque servo commande 2 petits bras, cela fait 840g !!!
Effectivement, un EV3 ne peut commander que 4 servos. Mais comme je l'ai dit plus haut, j'ai fait l'acquisition d'un multiplexer qui permet d'ajouter 2 servos en se connectant sur une entrée capteur, sans perdre cette entrée capteur, https://www.generati...paign=Doofinder
Pour la programmation, j'utilise l'EV3-G, le langage de base du Lego Mindstorms EV3.
Si cela t'intéresse, j'utilise le capteur Gyro qui est un capteur qui donne l'inclinaison sur un plan. Malheureusement, c'est le capteur le plus difficile à gérer, même sur un EV3. En fait, la fonction est buguée.
Mais j'ai eu la main verte et j'ai trouvé quelques bonnes explications sur le web. Bref, j'ai réussi à programmer un déploiement des petits bras en fonction de l'inclinaison du char.
Cela à l'air simple à première vue, et bien pas du tout, c'est une sacrée prise de tête de 4 lignes...
C'est vrai que mes dernières lignes de codes datent d'il y a plus de 20 ans et qu'avec l'âge, les neurones sont plus lents...
Pour mémoire, mon objectif, c'est de monter des escaliers. Chose que j'ai déjà réussi à faire. Là, la difficulté, c'est la taille du char qui est très réduite. À ma connaissance, je serai le premier à avoir réussi à faire monter un escalier à un char de moins de 50cm.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#51
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 24 novembre 2016 - 08:23
Comme je le soupçonnais, les servos, malgré leur puissance de 45Ncm, ne parviennent pas à maintenir la position des petits bras.
Le pire, c'est que je le savais dès le départ. Depuis longtemps, je sais qu'une articulation sur un axe de moteur ou de servo demande une grand puissance.
La solution, c'est les vérins et rien d'autre.
C'est faisable, mais cela nécessiterait une augmentation de la taille du char. Or, j'ai déjà fait un gros char qui fonctionne très bien.
En conséquence, ce projet n'a plus lieu d'être et donc je l'arrête là.
Bon, la fin de l'année approche, pour 2017 je crois que je vais me lancer dans le nylon...
Le pire, c'est que je le savais dès le départ. Depuis longtemps, je sais qu'une articulation sur un axe de moteur ou de servo demande une grand puissance.
La solution, c'est les vérins et rien d'autre.
C'est faisable, mais cela nécessiterait une augmentation de la taille du char. Or, j'ai déjà fait un gros char qui fonctionne très bien.
En conséquence, ce projet n'a plus lieu d'être et donc je l'arrête là.
Bon, la fin de l'année approche, pour 2017 je crois que je vais me lancer dans le nylon...
Ma chaine YouTube : https://www.youtube..../oracid1/videos








0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




