Top maintenant que les coupleurs sont en parallèle, j'arrive bien à commander 4 servos simultanément. Il s'agissait apparemment d'un manque d'intensité.
A présent j'alimente les servos en les branchant directement aux coupleurs (4 piles AA chacun). Du coup plus besoin du régulateur 6V et condos associés.
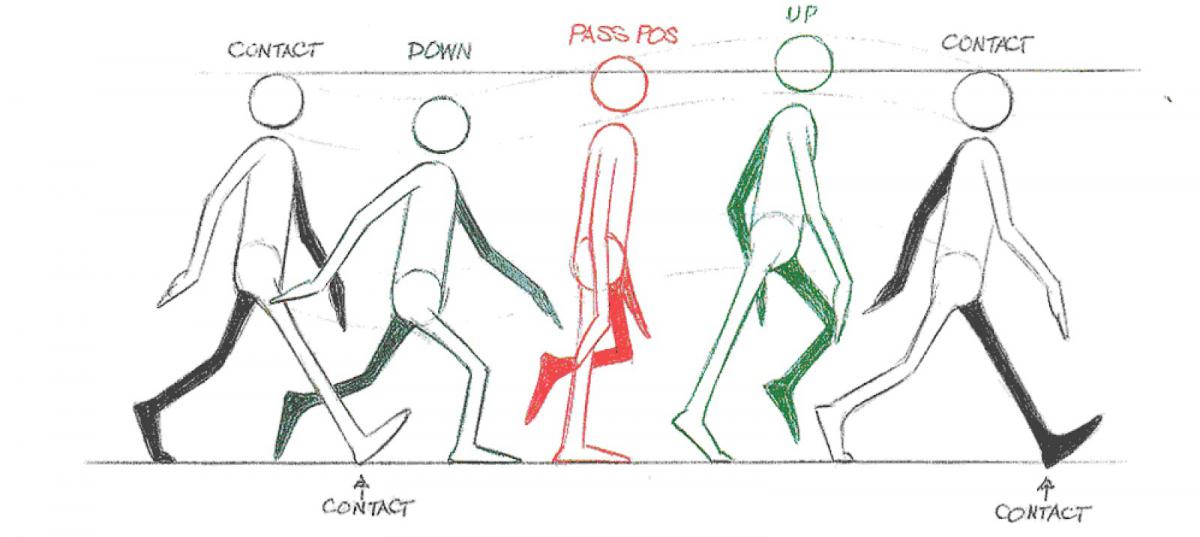
Je vais pouvoir continuer à programmer la marche.
Bon avant je vais devoir remplacer le régulateur 3.3V de l'alim du nodeMCU, il vient de perdre une patte dans la bataille.
Là j'ai reçu 2 nodeMCU de constructeurs différents et je peux maintenant répondre à ma propre question de la page 3 :
Je peux contrôler cette sortie "SK" en appelant le numéro 10 dans le code Arduino. Je ne sais pas si ce fonctionnement est propre à mon modèle de nodeMCU ?
=> Sur chaque nodeMCU, la sortie SK se commande bien avec la sortie 10
Pour l'instant je confirme donc mon circuit ultra simpliste pour le branchement de mes 9 Servos :
- commandes branchées directement à 9 sorties du nodeMCU
- alimentations branchées directement aux 2 coupleurs en parallèle