Je ne pensais pas que les pièces en PLA pouvaient être si solides. Évidemment le résultat est bien plus précis que mon usinage manuel et même pas besoin de brancher la perceuse, les troues sont déjà là.
Voici une comparaison, alu/PLA


Habitué

Posté 31 décembre 2016 - 10:49
Pilier du forum

Posté 31 décembre 2016 - 11:01
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre passionné

Posté 31 décembre 2016 - 11:04
Le PLA solide oui mais attention c'est pas toujours évident.....N'hésite pas à passer en palonnier alu....
Tu as de beaux servomoteurs avec contre-axe et retour de position ?
Tu en es content en terme de précision de positionnement et de stabilité?
Pilier du forum

Posté 31 décembre 2016 - 12:02
+1 avec Telson, suis curieux ^^
Sinon j'ai reçu mes nouvelles vis, donc elles sont plus légère, et je sais que mes pièces péteront avant qu'une vis ne lâche 
https://fr.aliexpres...0608.0.0.T99TxC
le poids d'une M3x10 varie entre les 0.5 et 0.6 gr, les autres que j'utilise d'habitude et pour la même taille font 0.8.
C'est sur, quand tu en a très peu le poids ne se ressent pas.
Donc si cela peut t'aider pour A. Wrestler 
Habitué
Posté 06 janvier 2017 - 05:54
Merci Oracid. Oui le principe existe bien mais là je fais la pièce sur-mesure pour mon servo-moteur et je compte continuer à travailler le modèle 3D de cette structure pour pouvoir y "clipser" ensuite la coque externe.
@Telson et @Oliver17 merci pour les conseils.
Concernant ces moteurs, je suis assez fan. Ils gardent fermement leurs position tant qu'ils sont alimentés donc pour les jambes d'un bipède c'est top.
"retour de position" il n'y a pas de signal de retour mais l'asservissement du servo me suffit.
Habitué
Posté 09 janvier 2017 - 10:59
Aujourd'hui je suis super content, j'ai fait ma première appli avec Cordova.
Pour l'instant j'ai simplement mis 2 boutons pour allumer 2 leds connectées à mon nodeMCU.
L'appli est chargée sur mon smartphone qui communique avec le nodeMCU en WIFI.
Le système Cordova permet de compiler l'appli pour la rendre disponible aussi bien sur Android, IOS, Windows phone, etc... 
Habitué
Posté 17 janvier 2017 - 09:51
J'ai trouvé une solution à mon problème précédent :
si par ex. j'éloigne le smartphone et que la connexion WIFI avec le NodeMCU est interrompue, est-ce qu'il y a moyen de le reconnecter automatiquement quand je le rapproche à nouveau ?
Pour l'instant quand je reviens dans la zone de couverture, impossible de reconnecter le smartphone. Il faut même redémarrer le NodeMCU sinon il ne veut plus accepter la connexion WIFI
La solution est un "watchdog" : le nodeMCU vérifie périodiquement que le client (mon smartphone) est toujours connecté. Si le smartphone s'éloigne et perd la connection WIFI, le nodeMCU se "reset" et attend que le smartphone se reconnecte.
Ca fonctionne bien, le smartphone se reconnecte automatiquement dès que je le rapproche. Par contre sur mon Android il faut absolument désactiver le mode WIFI+ sinon il se reconnecte toujours à ma box internent au lieu de se reconnecter au nodeMCU.
Deuxième problème pour le moment, si mon smartphone se met en veille, le nodeMCU meurt et il faut l'éteindre/rallumer pour qu'il accepte une nouvelle connexion... je vais essayer de corriger ce dernier point pour que le système soit assez robuste.
Habitué
Posté 07 mars 2017 - 01:30
Hello les makers,
Je vous donne enfin quelques news.25026
.0
000000000000000000000000000000000000
bon désolé mon bébé vient d'écrire ses premiers caractères ici avec mon clavier alors j'ai envie de les garder pour la postérité
De mon côté, j'ai continué à travailler sur mon Autonomous Wrestler mais j'ai galéré comme un damné pour dessiner et imprimer en 3D les premiers éléments.
Je travaille avec Blender et je commence tout juste à être à l'aise pour l'utiliser.
Je suis arrivé à obtenir les formes que je voulais à l'écran mais ensuite pour imprimer, catastrophe.
Même en lisant des tutos j'avais du mal à comprendre comment éviter les superpositions de faces, les géométries "non-manifold" et tous ces détails qui pourrissent l'objet dès qu'on essaye de l'imprimer.
Heureusement il me suffisait de voir la simulation type slicing de Cura pour me rendre compte que l'impression allait foirer.
Ce week-end j'ai enfin réussi à obtenir ce que je voulais à l'écran et en vrai !

Il s'agit de 2 pièces : 1 pied et 1 tibia reliés par un servomoteur + un autre servomoteur en haut pour le genou.
Après avoir galéré des semaines, je sens que j'ai compris ce qu'il faut pour pouvoir enfin construire le reste! 
Habitué

Posté 07 mars 2017 - 01:39
Et en blanc c'est beau 
Pilier du forum
Posté 07 mars 2017 - 03:30
Super, j'ai failli poster tout à l'heure pour savoir ou tu en étais, transmission de pensés ^^
Sinon pour tes pièces je les trouves plutôt sympa, et tous cela avec blender, bravo, perso j'ai essayé blender rapidement, je ne me suis pas senti à l'aise dessus et suis resté sur 123D moins puissant certes, mais rapide à prendre en mains.
Sinon, Autodesk 360 fusion est excellent aussi, mais le hic il ne tourne pas sur mon portable, bref, j'arrête de raconter ma vie et j'ai hâte de voir la suite, ça promet, et comme on me l'a souvent dis, pense aux accès vis, aux passages de fils etc etc
Membre passionné
Posté 07 mars 2017 - 10:16
Super génial tes pièces.
Bravo.
Pilier du forum
Posté 12 mars 2017 - 08:21
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Habitué
Posté 12 mars 2017 - 09:54
Merci de votre intérêt pour ce projet ça m'encourage !
"et comme on me l'a souvent dis, pense aux accès vis, aux passages de fils etc etc"
Yes j'avais prévu les troues pour sortir les fils des servos moteurs mais tu me fais penser qu'il faut que j'intègre des "goulottes" dans le design pour guider les fils.
@Oracid ok je vais préparer une vidéo avec une jambe en action.
Membre passionné
Posté 13 mars 2017 - 07:38
C'est quoi tes servomoteurs?
Habitué
Posté 24 mai 2017 - 11:42
Coucou mieux vaut tard que jamais ? les servos des jambes sont des SpringRC SR403P
Je suis enfin de retour sur ce projet et pour me faire pardonner je vous propose une photo d'une version intermédiaire sans les bras :
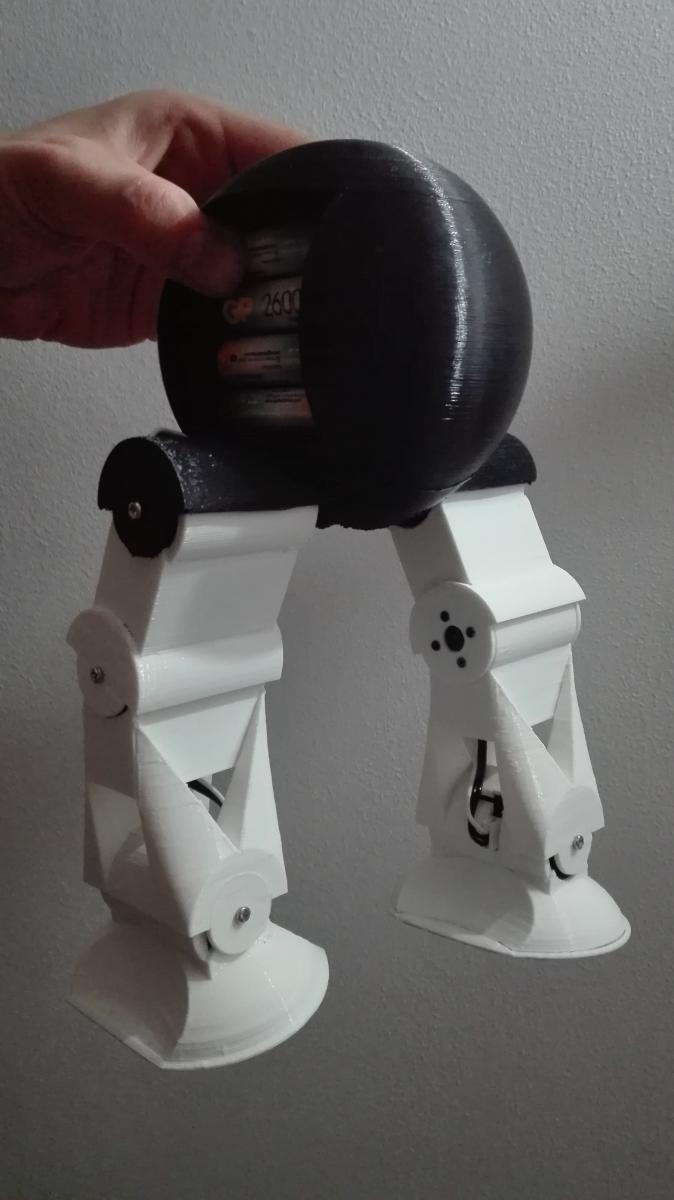
Les jambes sont prêtes et la tête contient tout ce qu'il faut (nodeMCU et alimentation) pour commencer à programmer la marche.
Pour cette version intermédiaire j'avoue que je me suis un peu inspiré du robot des "poozers" https://youtu.be/1NGQjRMXg28 (surtout au niveau de la grosse tête ronde)

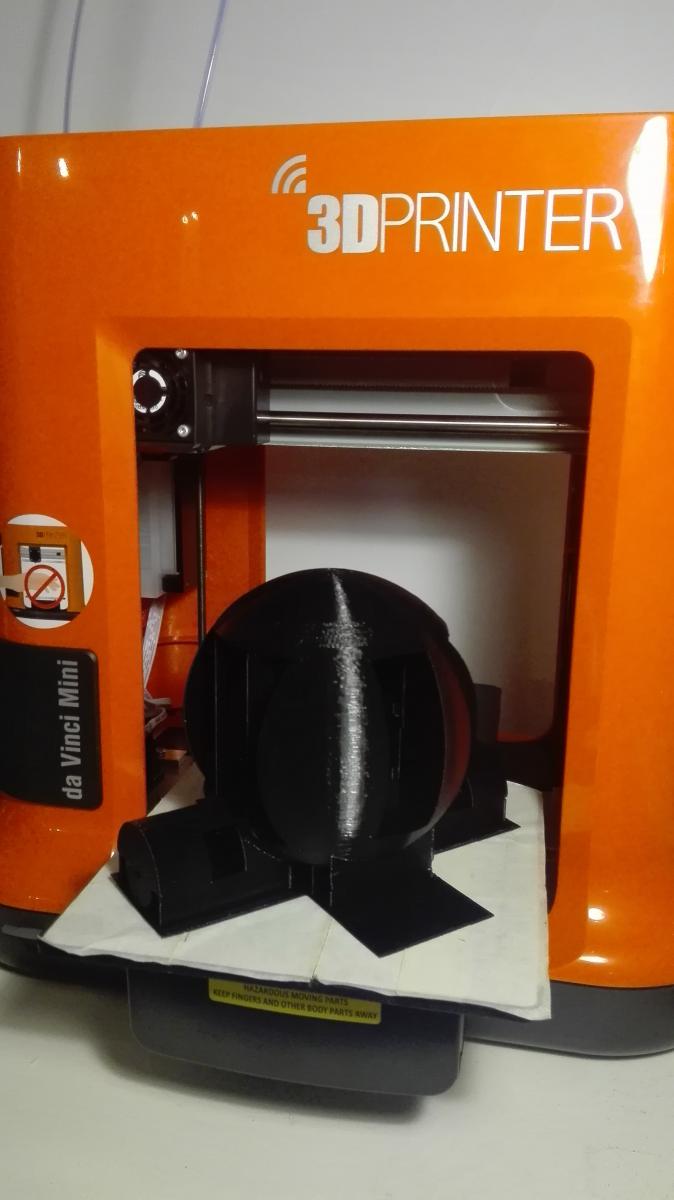
Ma mini imprimante a mis 15h pour accoucher de la tête. J'ai été obligé de la positionner en diagonale pour que ça passe!
J'espère que mon prochain message contiendra une vidéo "en marche"
Made By Humans

Posté 25 mai 2017 - 12:21
Han !! Il a les mêmes articulations que mon Emile
En plus léger je suis sûr que ça va me plaire.
Membre passionné
Posté 25 mai 2017 - 03:50
Waouh !!!! C'est vraiment très beau. Bravo !
Habitué
Posté 12 juin 2017 - 12:20
Merci beaucoup beaucoup pour vos compliments !
Évidement chaque étape amène de nouvelles difficultés. Depuis mon dernier message je galère avec la partie alimentation !
J'ai mis 2 coupleurs de 4 piles AA chacun (rechargeables), comme sur mon E-Rambo.
Sur le E-Rambo je répartissais
Problème : les piles d'un coupleur se déchargeaient plus vites que les piles de l'autre coupleur.
Pour l'AW j'ai l’ambition de faire un truc plus pro donc je préfère brancher les 8 piles sur l'ensemble des servos de manière à avoir une usure homogène.
Ça permettrait de remplacer toutes les piles d'un coup sans avoir à tester quel coupleur a des piles plus usées que l'autre.
J'ai commencé par mettre les 8 piles en série et j'ai mis un régulateur pour remmener la tension à 6V pour les servos et un second régulateur à 3.3V pour le nodeMCU.
Mon idée était d'avoir une bonne tension aux bornes de mes servos qui fonctionnent idéalement entre 6V et 7.4V d'après la doc.
La commande d'un servo fonctionnait bien, à 2 servos simultanément je commençais à avoir des réactions bizarres des moteurs et à 3 servos le délire total.
J'ai tenté tout un tas de combinaison : brancher le régulateur 3.3V après le régulateur 6V, brancher le régulateur 3.3V en parallèle du 6V, j'ai essayé d'ajouter des condos en entrée en sortie des régulateurs, ça a permis de réduire les mouvements bizarre des servos mais pas complétement.
J'ai fini par branché mon oscilloscope pour voir la tête de la tension d'alimentation pendant la commande de 3 servos simultanément et là j'ai vu des montagnes Russes !
Donc le régulateur 6V n'arrivait pas à maintenir la tension.
En fin de compte, ce week-end je pense que j'ai eu une révélation mais à confirmer*. Le problème ne vient peut-être pas de la tension mais d'un manque d'intensité.
En parallèle série, la tension s'additionne mais l'intensité reste la même!
Du coup j'ai mis les 2 coupleurs en série en parallèle pour doubler l'intensité. Par contre cà me donne une tension d'environ 5.5V donc en dessous de la tension nominale des servos. Je n'aurais pas le couple maxi mais ça suffira (même tension d'alim dans le E-Rambo).
Avec 2 servos simultanés, aucun soucis.
*Par contre je n'ai pas pu confirmer avec 3 servos car j'ai déglingué la prise USB de mon nodeMCU donc je ne peux plus le programmer  j'attends un nouveau node dans la semaine !
j'attends un nouveau node dans la semaine !
A suivre...
Staff Robot Maker

Posté 12 juin 2017 - 03:23
En fin de compte, ce week-end je pense que j'ai eu une révélation mais à confirmer*. Le problème ne vient peut-être pas de la tension mais d'un manque d'intensité.
En parallèle, la tension s'additionne mais l'intensité reste la même!
Du coup j'ai mis les 2 coupleurs en série pour doubler l'intensité. Par contre cà me donne une tension d'environ 5.5V donc en dessous de la tension nominale des servos. Je n'aurais pas le couple maxi mais ça suffira (même tension d'alim dans le E-Rambo).
Avec 2 servos simultanés, aucun soucis.
A suivre...
Je corrige un point :
Deux batteries ou piles en série et la tension s'additionne mais l'intensité max fournissable est la même
Deux batteries ou pile en parallèle, les tensions "s'équilibrent " et l'intensité fournissable est "potentiellement plus importante" ( si les sections de câble le permettent )
Par contre attention avec les câblages // ... précautions à prendre quand on fait ça avec des batteries lipo ...
Pour ton robot il te faut un convertisseur 5V 7A par exemple et une batterie qui peut délivrer le courant nécessaire ...
Les piles sont trop juste ...
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!








0 members, 0 guests, 0 anonymous users





