Ok Merci Mike, il faudrait donc faire un petit diviseur de tension pour ramener la tension de sortie du capteur de 2.5V à 1V et pouvoir lire cette tension via l'entrée analogique du nodeMCU.
Par contre,
1,95 V ( = 0,35 + 1,60 ) mais qui peut être compris entre Min 1,40 V et Max 2,50V
Ça fait une marge d'erreur énorme ! Est-ce que vous savez si la valeur à 10cm va varier entre 1.4V et 2.5V en fonction des conditions d'utilisation (ex : luminosité de la pièce) ou si cette valeur est insensible aux conditions mais varient d'un capteur à l'autre (ex : marge d'erreur à la fabrication) ?
Vous auriez un autre capteur de distance assez directif, qui capte à un peu plus d'1 mètre et pas trop cher à me conseiller ?
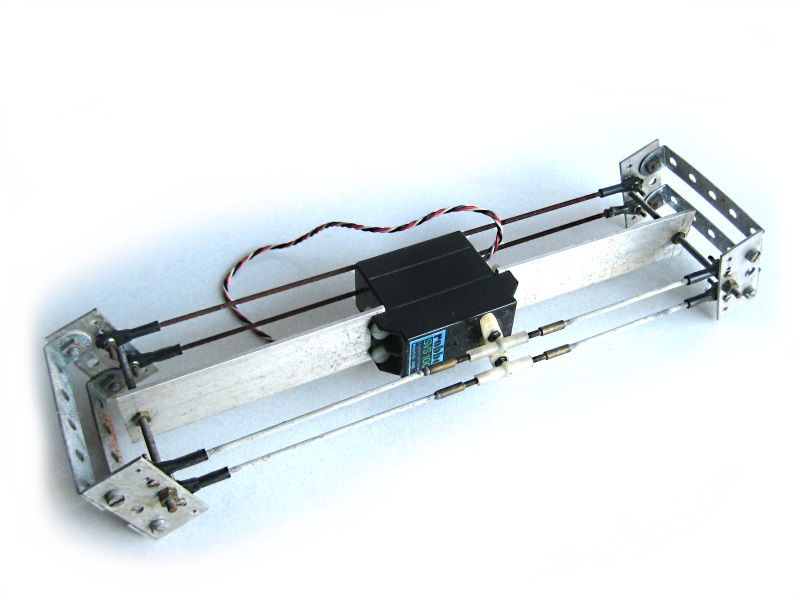
Pour l'instant, petite vidéo du week-end, voici le prototype du nouveau bras !
Ça claque non ?