

Salut les Makers !
J'aimerais partager avec vous une nouvelle aventure robotique dont voici le pitch :
"Lancer une campagne de crowdfunding Kickstarter pour réaliser un robot de combat autonome !"
Proposer sur Thingiverse un modèle 3D à imprimer et les explications pour construire un robot de combat autonome 
Les objectifs :
- Faire évoluer mon E-Rambo pour le rendre autonome et l'habiller d'un carénage esthétique
Financer l'achat d'une imprimante 3D digne de ce nomFinancement déjà réalisé par ailleurs
Date de lancement estimée :
Début 2017 Edit : je prends le temps de bien faire les choses donc ça sera plutôt 2018
Le temps passe... mais je me remets sur le sujet et je n'en suis plus très loin. Ca devrait être ok pour début 2021 !
Prix :
Environ 400€ Edit : grâce à tous les conseils récupérés ici, le robot sera mieux et bien moins cher !
Type de licence :
Open Hardware
L'idée serait donc de repartir de mon E-Rambo,
http://www.robot-maker.com/forum/topic/10225-robot-bipede-pour-le-tournoi-de-nimes-en-mai-2016/
http://www.robot-maker.com/forum/topic/10689-robot-bipede-pour-la-toulouse-robot-race-2016/
en améliorant certains aspects de sa structure et lui ajouter des fonctionnalités.
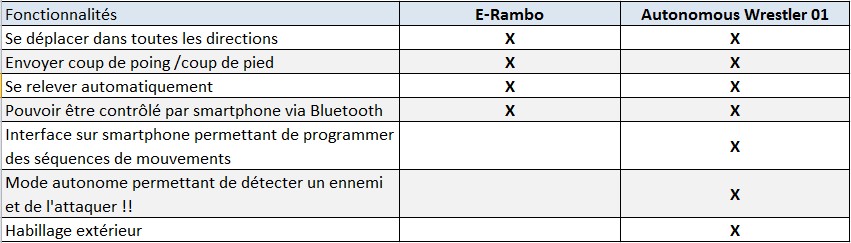
Voici un tableau comparatif des fonctionnalités actuelles d'E-Rambo et des fonctionnalités cibles du prochain robot que j'ai nommé Autonomous Wrestler 01.
Je suis en train de créer tous les plans sous Blender.
Pour l'impression de la coque, je fais ça à "La Fabrique d'Objets Libres" de Lyon.
J'ai pas mal d'idées pour la détection d'ennemis et la structure du robot en général mais ça va prendre du temps !
Si ce projet vous intéresse, je vous tiendrai au courant de son avancement 














 C'est plus fun que de les laisser se taper dessus, et dès que tu gagnes tu retournes coder pour améliorer l'IA de ton adversaire
C'est plus fun que de les laisser se taper dessus, et dès que tu gagnes tu retournes coder pour améliorer l'IA de ton adversaire 















