Voici mon nouveaux projet pour ce début d'année, un char articulé.
Comme d'habitude, je ne sais pas trop où je vais, mais comme vous pouvez le constater, j'ai de la suite dans les idées...
<j'ai changé le titre, j'aime mieux>

Lego - Char à géométrie variable
Débuté par Oracid, janv. 16 2017 01:00
50 réponses à ce sujet
#1

Oracid
-
- Modérateur
-

- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 16 janvier 2017 - 01:00
- Oliver17 aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#2
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 17 janvier 2017 - 12:13
Avec ce premier test, mon impression est mitigée.
Le vérin fonctionne bien, il fait son boulot. C'est le résultat de mes recherches sur la vis sans fin. Super !
Par contre, lorsqu'il soulève la partie avant du char, la chenille n'est plus tendue.
Ça, c'est un gros problème. Normal, le périmètre du char est plus petit.
Moi qui pensais que si je réglais le problème du vérin, c'était gagné, et bien non.
Il faut donc faire varier la géométrie du char tout en lui gardant le même périmètre. Fastoche ...
Bon, j'ai une idée. Je la mets en uvre et je vous montre.
Le vérin fonctionne bien, il fait son boulot. C'est le résultat de mes recherches sur la vis sans fin. Super !
Par contre, lorsqu'il soulève la partie avant du char, la chenille n'est plus tendue.
Ça, c'est un gros problème. Normal, le périmètre du char est plus petit.
Moi qui pensais que si je réglais le problème du vérin, c'était gagné, et bien non.
Il faut donc faire varier la géométrie du char tout en lui gardant le même périmètre. Fastoche ...
Bon, j'ai une idée. Je la mets en uvre et je vous montre.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#3
Mike118
-

- Administrateur
-
- 10â¯314 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 17 janvier 2017 - 01:51
Un tendeur de chenille à géométrie variable en fonction de la position du vérin ? =)
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#4
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 17 janvier 2017 - 02:06
C'est ce genre d'idée qui m'est venue au début, puis j'ai imaginé autre chose.Un tendeur de chenille à géométrie variable en fonction de la position du vérin ? =)
Patience, la vidéo va arriver, aujourd'hui j'espère... mais Madame a prévu une balade digestive dans le grand froid.
Si j'y survie...
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#5
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 17 janvier 2017 - 05:34
Voici mon deuxième test.
Dans le premier test, l'idée c'était de soulever l'avant du char en actionnant un bras, de l'avant vers l'arrière, avec mon vérin. Le bras était situé sur le haut du châssis et l'axe de rotation sur le bas du châssis.
Le résultat était excellent, malheureusement, la chenille flottait énormément car le périmètre du châssis diminuait au fur et à mesure du mouvement.
Dans ce nouveau test, j'ai choisi d'augmenter la taille du triangle au fur et à mesure du mouvement en poussant le bas du châssis avec un vérin sortant, l'axe étant situé maintenant sur le haut du chasse.
Je vous invite à visualiser cette vidéo en plein écran pour bien voir le mouvement.
Vous noterez que la partie avant en porte à faux est parfaitement stable pendant le mouvement.
Dans le premier test, l'idée c'était de soulever l'avant du char en actionnant un bras, de l'avant vers l'arrière, avec mon vérin. Le bras était situé sur le haut du châssis et l'axe de rotation sur le bas du châssis.
Le résultat était excellent, malheureusement, la chenille flottait énormément car le périmètre du châssis diminuait au fur et à mesure du mouvement.
Dans ce nouveau test, j'ai choisi d'augmenter la taille du triangle au fur et à mesure du mouvement en poussant le bas du châssis avec un vérin sortant, l'axe étant situé maintenant sur le haut du chasse.
Je vous invite à visualiser cette vidéo en plein écran pour bien voir le mouvement.
Vous noterez que la partie avant en porte à faux est parfaitement stable pendant le mouvement.
- Melmet aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#6
Path
-

- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 17 janvier 2017 - 07:34
Mais c'est que tu me donne des idées  Merci de partager tout ça.
Merci de partager tout ça.
#7
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 17 janvier 2017 - 07:56
Pourquoi faire ?Mais c'est que tu me donne des idées
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#8
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 17 janvier 2017 - 08:06
Pour avoir une alternative à la mécanique de ma tourelle.
#9
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 17 janvier 2017 - 08:57
Content pour toi.Pour avoir une alternative à la mécanique de ma tourelle.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#10
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 06 février 2017 - 06:36
Voilà, où j'en suis. J'ai eu un peu de mal avec les vérins.
La puissance demandée est énorme à cause du poids des deux servos des barbotins.
Pour les vérins, j'ai commandé cet écrous à un spécialiste de la modélisation Lego.
Je suis incapable d'imprimer ça. Là, c'est fait avec de la poudre.
https://www.shapeway...li=user-profile
Bon maintenant, l'objectif, c'est de faire la même chose, mais en mieux.
La puissance demandée est énorme à cause du poids des deux servos des barbotins.
Pour les vérins, j'ai commandé cet écrous à un spécialiste de la modélisation Lego.
Je suis incapable d'imprimer ça. Là, c'est fait avec de la poudre.
https://www.shapeway...li=user-profile
Bon maintenant, l'objectif, c'est de faire la même chose, mais en mieux.
Ma chaine YouTube : https://www.youtube..../oracid1/videos

#12
Donovandu88
-

- Membres
-
- 680 messages
Membre passionné
- Gender:Male
Posté 10 mars 2017 - 06:55
Cool ton système, tu as essayé avec les vérins Lego?
C'est aussi une sorte de vis sans fin dedans.
#13
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 12 mars 2017 - 08:44
@Oliver17. Les chenilles n'ont pas l'air mal, je pense qu'elles sont compatibles Lego. Mais le char n'est pas terrible. Il passe à peine 5cm, moi je passe une marche, 17cm. Par contre, je ne comprends pas en quelle matière elles sont. Cela ne ressemble pas à du caoutchouc.
@Donovandu88. Les vérins Lego, j'en ai, tu penses bien. Ce n'est pas suffisant. J'ai fait ça, http://www.robot-maker.com/forum/topic/11053-lego-worm-gear-nut-alternative/. D'ailleurs, je vais faire une nouvelle vidéo, mais déjà, regarde la dernière, elle devrait t'intéresser.
@Donovandu88. Les vérins Lego, j'en ai, tu penses bien. Ce n'est pas suffisant. J'ai fait ça, http://www.robot-maker.com/forum/topic/11053-lego-worm-gear-nut-alternative/. D'ailleurs, je vais faire une nouvelle vidéo, mais déjà, regarde la dernière, elle devrait t'intéresser.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#14
Donovandu88
-
- Membres
-
- 680 messages
Membre passionné
- Gender:Male
Posté 12 mars 2017 - 09:25
Oui je l'avais vu celle-ci.
Les vérins que tu as, c'est les nouveaux ou les anciens? Car les nouveaux sont beaucoup plus performant. Ils sont lubrifié à l'intérieur et procure plus de force que les anciens.
#16
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 12 mars 2017 - 11:35
As-tu un lien pour ces chenilles ? Elles n'ont pas l'air d'être en caoutchouc mou, c'est ça qui m'intrigue.@Oracid : c'était surtout pour les chenilles de chez Caterpillar , c'est sur que leurs char ne montera pas des escaliers comme les tiens
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#18
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 18 septembre 2017 - 05:04
Ces derniers temps, je me suis remis sur ce projet. J'ai complètement repensé la mécanique.
L'utilisation d'un vérin à vis m'a posé de gros problèmes et je ne m'en sortais pas. Alors, j'ai eu l'idée de faire un vérin avec crémaillère et roue dentée. Et bien, c'est super efficace, je n'en reviens pas. Voir dernière image.
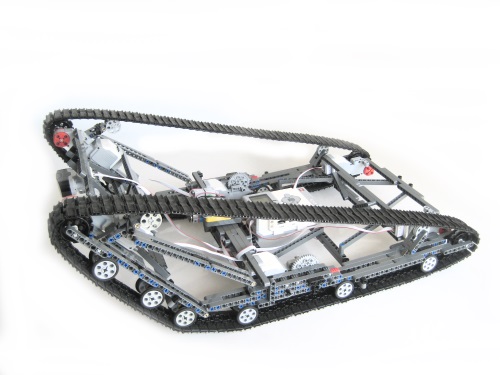
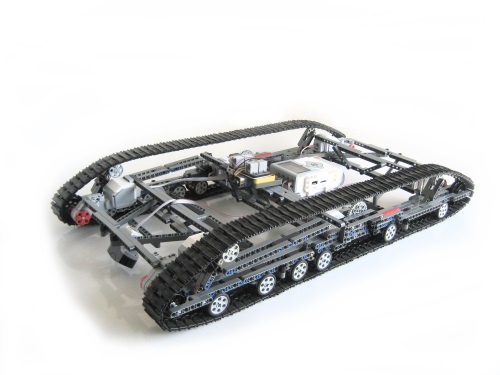
Je rappelle que l'idée de départ était de faire un char à géométrie variable, de manière à diminuer la longueur d'un char. Comme vous pouvez le voir sur la première image, la différence est très importante, j'ai superposé les 2 chars pour que l'on se rende bien compte.
Pour monter des escaliers, il faut que la semelle du char fasse 60cm, c'est incontournable. Mais si à cette semelle, il faut ajouter le plan incliné, alors on arrive à un monstre de 85cm comme mon dernier projet, ici, http://www.robot-maker.com/forum/topic/10713-lego-ev3-big-and-light-tank-climber-12/
Mon idée, c'est de raccourcir le char avec une semelle d'environs 40cm et d'aplatir le nez lorsqu'il est en position inclinée dans la montée. Cela fait un char d'environ 60cm tout compris. C'est tout à fait acceptable pour un robot "domestique" qui traine dans la maison et vaque à ses occupations.
Pour l'instant, cela fait 2 jours que j'ai tout refait. Il roule très bien et monte parfaitement bien les escaliers. Mais ça, je sais faire.
Maintenant, il faut que je réussisse à faire un programme qui mesure l'inclinaison au moment où le char grimpe la première marche.


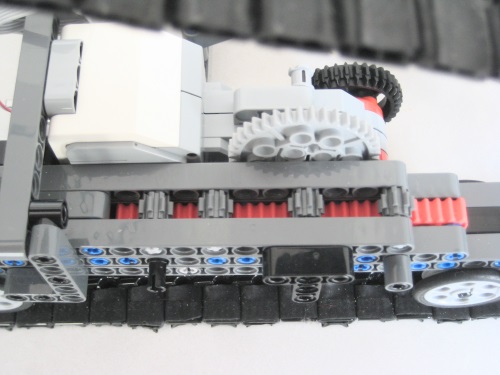
L'utilisation d'un vérin à vis m'a posé de gros problèmes et je ne m'en sortais pas. Alors, j'ai eu l'idée de faire un vérin avec crémaillère et roue dentée. Et bien, c'est super efficace, je n'en reviens pas. Voir dernière image.
Je rappelle que l'idée de départ était de faire un char à géométrie variable, de manière à diminuer la longueur d'un char. Comme vous pouvez le voir sur la première image, la différence est très importante, j'ai superposé les 2 chars pour que l'on se rende bien compte.
Pour monter des escaliers, il faut que la semelle du char fasse 60cm, c'est incontournable. Mais si à cette semelle, il faut ajouter le plan incliné, alors on arrive à un monstre de 85cm comme mon dernier projet, ici, http://www.robot-maker.com/forum/topic/10713-lego-ev3-big-and-light-tank-climber-12/
Mon idée, c'est de raccourcir le char avec une semelle d'environs 40cm et d'aplatir le nez lorsqu'il est en position inclinée dans la montée. Cela fait un char d'environ 60cm tout compris. C'est tout à fait acceptable pour un robot "domestique" qui traine dans la maison et vaque à ses occupations.
Pour l'instant, cela fait 2 jours que j'ai tout refait. Il roule très bien et monte parfaitement bien les escaliers. Mais ça, je sais faire.
Maintenant, il faut que je réussisse à faire un programme qui mesure l'inclinaison au moment où le char grimpe la première marche.
- Melmet aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#19
Oliver17
-

- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 18 septembre 2017 - 05:18
La classe dis donc, j'adore tes chars il sont bien sympathique, sinon pour l'inclinaison, ben je dirais une central inertielle, ça te donnera l'inclinaison sur l'axe désirée 
Si on peut récupérer l'inclinaison d'un avion " " comme sur la vidéo, tu peux te servir de cette information pour voir si ton char est inclinée.
Tu peux même récupérer l'accélération lorsque le char se retrouve en pente descendante si je puis dire, histoire qu'il n'aille pas trop vite à la descente.
Démo en vidéo.
#20
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 18 septembre 2017 - 07:05
Merci Oliver. J'aimerais bien, un jour, faire ce char avec un Arduino et des servos normaux. Et à ce moment ta vidéo me sera très utile.
Mais pour le moment, je vais utiliser le capteur d'inclinaison Lego qui est très efficace.
Cela fait parti de mes projets d'adapter les servos et l'électronique classique aux Lego, http://www.robot-maker.com/forum/topic/11459-arduino-servo-sg90-brick-compatible/?p=84355
Mais pour le moment, je vais utiliser le capteur d'inclinaison Lego qui est très efficace.
Cela fait parti de mes projets d'adapter les servos et l'électronique classique aux Lego, http://www.robot-maker.com/forum/topic/11459-arduino-servo-sg90-brick-compatible/?p=84355
Ma chaine YouTube : https://www.youtube..../oracid1/videos








1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




