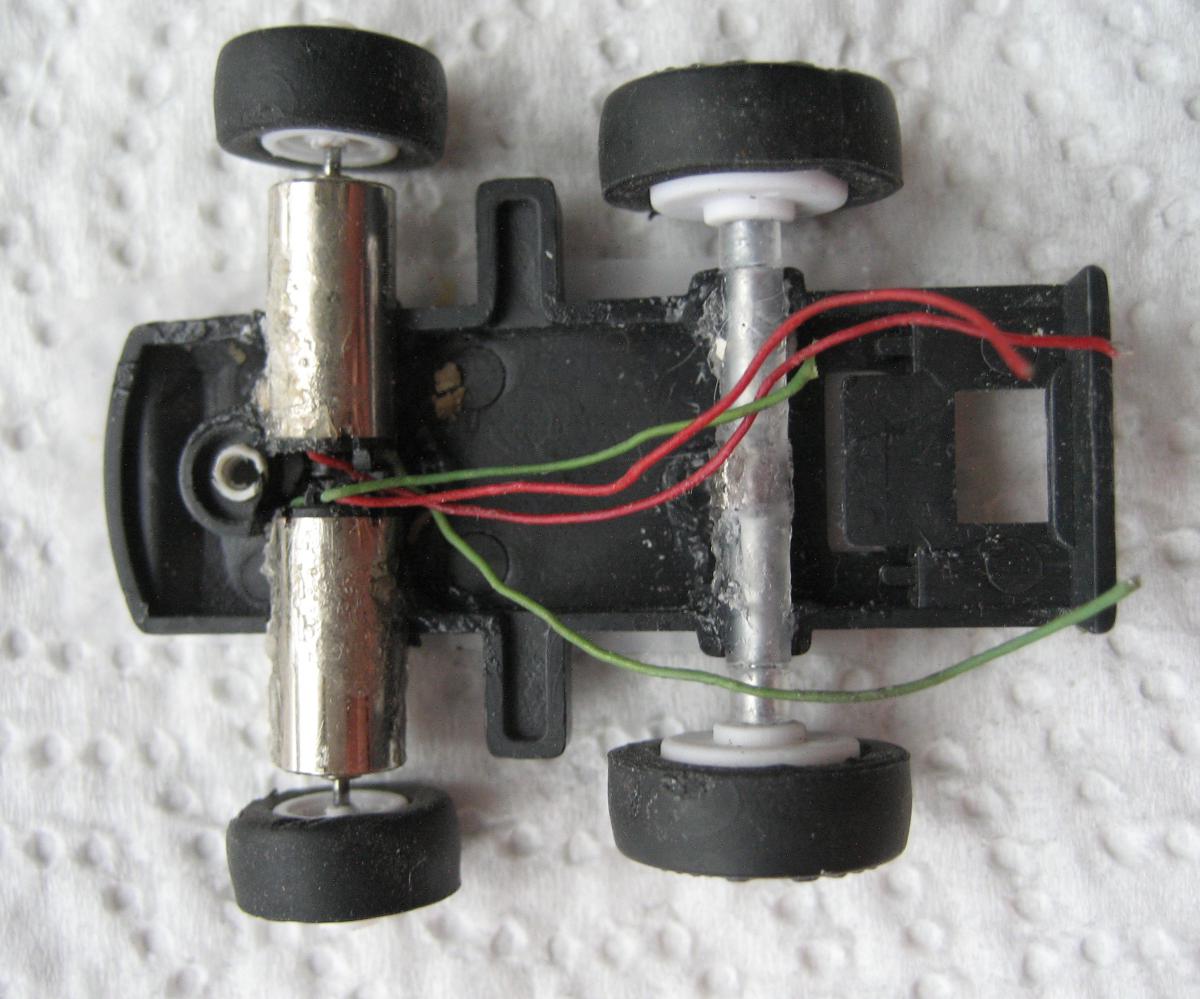
TinyBot24 mini robot autonome diamètre 4cm poids 25 Grammes détection IR & LDR
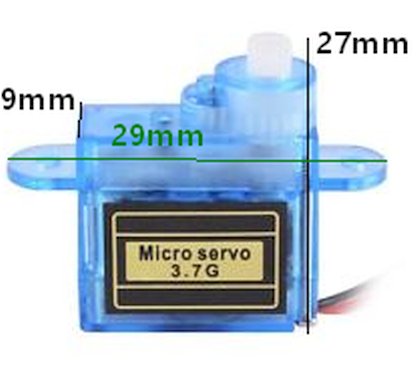
mû par deux servomoteurs de 3,7 Grammes à rotation continue.

Alimentation par un batterie Li-ion de 3,7 V et 70mA
Moteurs MicroServo 3,7 Grammes
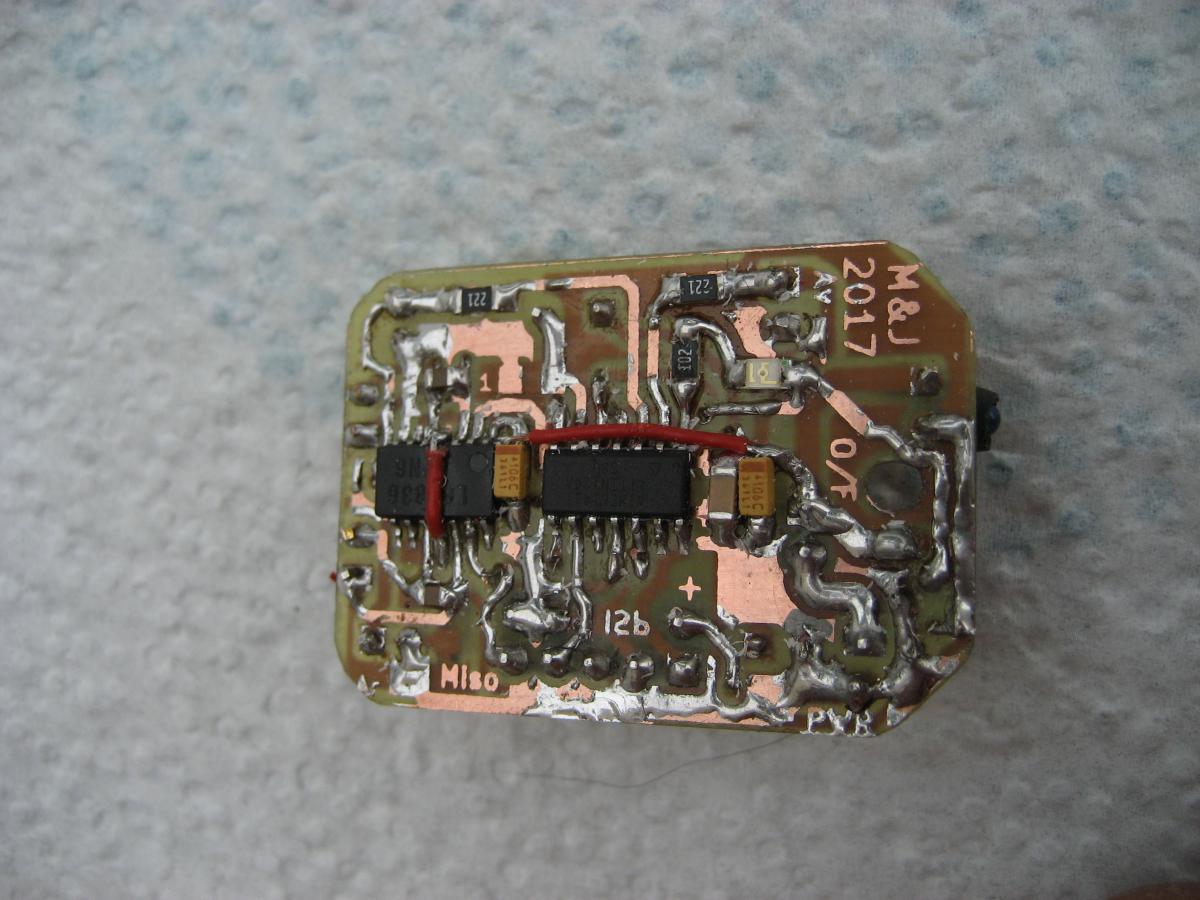
Pont en H LB1836M soic 14 broches
Microcontrôleur ATTiny24A soic 14 broches
2Ko mémoire Flash, 128 octets Mémoire SRAM, 128 octets mémoire EEPROM,
12 entrées/Sorties & nombreuses autre fonctions.
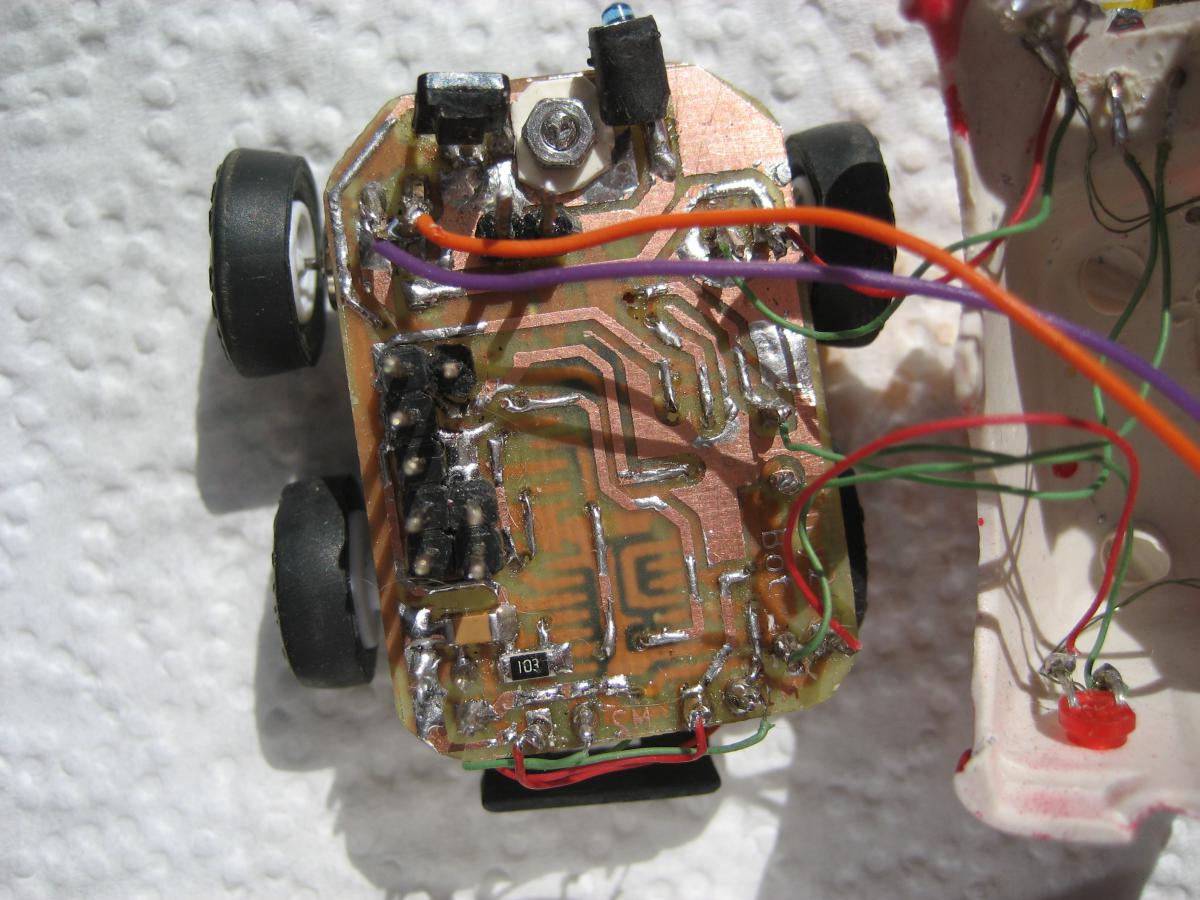
Détection d'obstacles Capteur infrarouge Sharp IS471F et Led IR 2mm CQY37N
Déplacement en obscurité par détection photorésistance (LDR de 5mm) et deux LED blanches 3mm
Feux se recule deux LED rouges 3mm.
Programmé en BASIC avec BASCOM AVR
Programmateur USBasp.
Création du PCB avec Kicad 4.02 le lien pour Kicad à changé voici le lien des anciens Kicads
la version actuelle est la 8.05 mais le mieux est de télécharger la version 4.07:
https://downloads.ki....0.7-x86_64.exe
tous les fichiers pour la création ici:
https://drive.google...dTYwM0tMdlBnUzg