Dans mes explorations, la mécanique est très pauvre parce que c'est pas du tout ma partie.
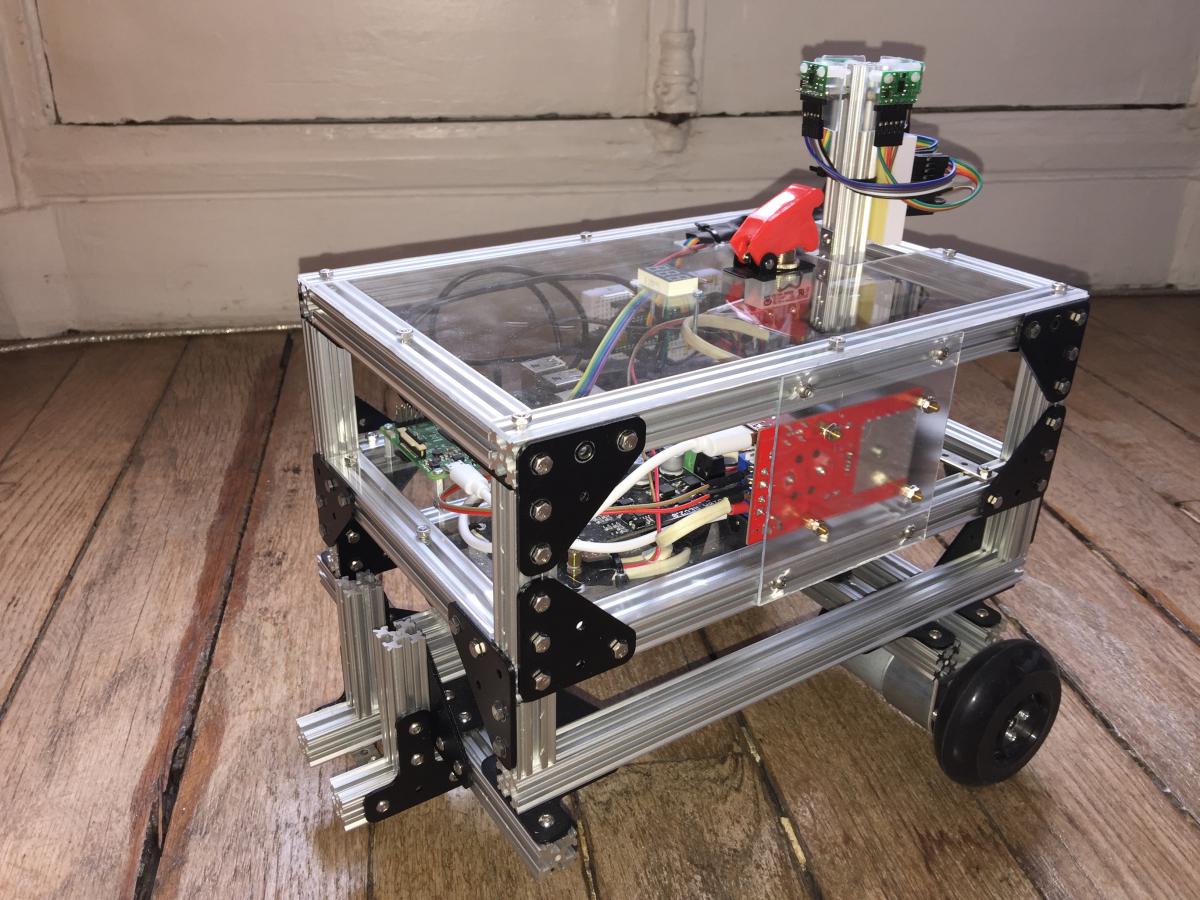
J'adore utiliser mes profilés en aluminium pour faire des chassis. C'est super rigide, réutilisable, pas trop lourd. Avec Hector, par exemple, les moteurs sont fixés directement sur le chassis et les roues directement sur l'axe du moteur. Genre ça :
Je crois que je peux améliorer si c'est pas trop cher.
Premier pb : j'ai beaucoup de vibrations quand il roule sur un sol dur et pas plat. J'ai un vieux parquet.
Est-ce que vous croyez que ce genre d'amortisseur peut réduire les vibrations ?

Deuxième pb : mes robots on un poids entre 2 et 4 kg. Et je crois que c'est pas top que l'axe du moteur porte le poids du robot. Je pense à des courroies, des pignons et des roulements pour déporter les moteurs.
J'ai pas vraiment de piste pour corriger les 2 pb en même temps. Il faudrait des cardans ? ça commence à se compliquer là. ça vous inspire quoi ?







 Elle et moi n'étions pas en bon termes. Et j'ai gagné la bataille. Peut-être un jour plus tard.
Elle et moi n'étions pas en bon termes. Et j'ai gagné la bataille. Peut-être un jour plus tard.