

merci Path 

32 réponses à ce sujet
#22

esuzen
-
- Membres
- 9 messages
Nouveau membre
Posté 13 mars 2019 - 09:36
Bonjour
Je vais essayer de mieux expliquer 
Il y a un tube de 40m avec des virages/montés/descentes
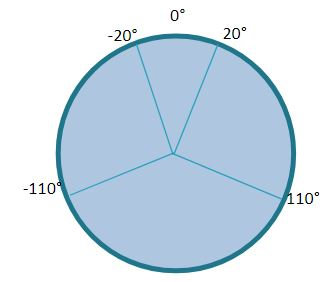
Dans ce tube il y a des trous qui varient entre 10, 20 et 30mm de diamètre
Les trous sont disposés dans une plage angulaire entre -110 ° et -20 ° et entre 20 ° et 110 ° (voir schéma https://zupimages.ne.../19/11/f4zi.jpg)
Le robot circule à l'intérieur, je travail déjà sur la conception, donc vous n'avez pas besoin de prendre en compte les dimensions etc
Le robot doit circulé dans le système de tube et doit etre capable de donner la position des trous; donc il ne faut pas traverser les trous car il faut finir le parcours le plus vite possible
Les tubes peuvent etre transparente ou opaque, de matière différente, pas d'éclairage, il y fait très sombre
Voila, j'espère avoir été un peu plus clair cette fois ci 
Merci d'avance pour votre aide 
#23
pmdd
-

- Membres
-

- 945 messages
Membre chevronné
- Gender:Male
Posté 13 mars 2019 - 11:27
Bonjour
Je vais essayer de mieux expliquer
Il y a un tube de 40m avec des virages/montés/descentes
Dans ce tube il y a des trous qui varient entre 10, 20 et 30mm de diamètre
Les trous sont disposés dans une plage angulaire entre -110 ° et -20 ° et entre 20 ° et 110 ° (voir schéma https://zupimages.ne.../19/11/f4zi.jpg)
Le robot circule à l'intérieur, je travail déjà sur la conception, donc vous n'avez pas besoin de prendre en compte les dimensions etc
Le robot doit circulé dans le système de tube et doit etre capable de donner la position des trous; donc il ne faut pas traverser les trous car il faut finir le parcours le plus vite possible
Les tubes peuvent etre transparente ou opaque, de matière différente, pas d'éclairage, il y fait très sombre
Voila, j'espère avoir été un peu plus clair cette fois ci
Merci d'avance pour votre aide
Le robot doit comptabiliser le nombre exact de trous en donnant un résultat du style il y a x trous de 10 mm, y trous de 20 mm et z trous de 30 mm dans la totalité du tube de 40m ? Il faut faire une cartographie exacte des trous ? Les trous donnent sur l'extérieur ? Peut-on équiper le robot d'un éclairage ?
Je ne sais pas s'il y a des solutions simples. Il y a des solutions pro, c'est sûr. Une ou deux caméra auxquelles on "apprend" les 3 types de trous et qui scrute les portions concernées et identifie les trous. Là il faut jouer avec un éclairage qui distinguera les trous d'une surface lisse.
#24
esuzen
-
- Membres
- 9 messages
Nouveau membre
Posté 13 mars 2019 - 12:00
Le robot doit comptabiliser le nombre exact de trous en donnant un résultat du style il y a x trous de 10 mm, y trous de 20 mm et z trous de 30 mm dans la totalité du tube de 40m ?
-> Oui
Il faut faire une cartographie exacte des trous ?
-> Oui, mais je travail la dessus déja, pour le moment je cherche juste a les détecter, pour la cartographie je vais utiliser SLAM
Les trous donnent sur l'extérieur ?
-> Pas forcément
Peut-on équiper le robot d'un éclairage ?
-> Oui
L'objectif étant d'avoir une solution la moins couteuse et encombrante possible
#25
Mike118
-

- Administrateur
-
- 9â¯969 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 13 mars 2019 - 02:10
Le tube fait 40m de long et combien le diamètre du tube?
Commen fais tu ton " SLAM " ? Quels sont les capteurs que tu utilises pour te localiser dans le tube ? ( Peut être qu'ils peuvent aider à la détection des trous ... )
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#26
esuzen
-
- Membres
- 9 messages
Nouveau membre
Posté 14 mars 2019 - 10:00
Bonjour,
Comme dit actuellement on s'en fiche du diamètre et du reste du robot, on a une équipe dédié qui y travaille, ma question c'est quel capteur/dispositif me conseillerez vous pour détecter les trous dans un environnement sombre; faites moi des propositions je me charge des tests et du choix, c'est juste que je n'ai pas beaucoup d'idée de dispositif simple et efficace. La seule chose à retenir c'est qu'il faut faire la détection en mouvement
D'avance merci
#27
Path
-

- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 14 mars 2019 - 11:46
Tu sais que tu es sur un forum de discussions ? Tu n'auras que des retours à la hauteur de ce que tu donnes.
Rédige un appel d'offre, il y a peut-être un pro dans l'assistance qui te proposera un devis pour intervenir sur votre problème.
Tu travailles pour quelle boite ?
#28
Mike118
-
- Administrateur
-
- 9â¯969 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 14 mars 2019 - 01:50
j'ai déjà fournis deux idées différentes. En absence de plus d'info j'ai pas plus d'idée à fournir.
On s'en fiche du diamètre des tubes ? Eh bien non, en fonction du diamètre il faut privilégier une idée ou l'autre voir même tout repenser différement...
Je parle pas de savoir si c'est un diamètre de 40 ou 41 cm, une variation d'1 cm importe peu ... Mais je parle de savoir si on a un tube de 20cm environ, 40cm, 80 cm 120 cm ?
Mais bon comme l'a dit Path : Les réponses que tu as obtenus sont "Bénévole et gratuite" ...
Tu devrais être heureux qu'on s'intéresse à ta demande et qu'on te fournisse gratuitement cette aide ... Nos seules "récompense" sont :
=> Des remerciements,
=> Le sentiment d'avoir aidé quelqu'un et qu'il soit content,
=> Des photo / vidéo de la réalisation sur laquelle notre aide a été utile ... Ou des informations complémentaires.
- pmdd aime ceci
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#29
esuzen
-
- Membres
- 9 messages
Nouveau membre
Posté 15 mars 2019 - 09:20
Tu sais que tu es sur un forum de discussions ? Tu n'auras que des retours à la hauteur de ce que tu donnes.
Rédige un appel d'offre, il y a peut-être un pro dans l'assistance qui te proposera un devis pour intervenir sur votre problème.
Tu travailles pour quelle boite ?
Oui je sais que je suis sur un forum de discussions; et je suis la pour poser mon problème, je n'ai pas besoin que quelqu'un fasse le travail à ma place. Je demande simplement des pistes, qu'est ce que vous vous feriez pour détecter des trous. Sans tube ni rien, juste détecter les trous
J'ai déja penser à l'infrarouge, l'ultrason, le lidar, microrupteur, laser + caméra pour détecter la déformation
Donc j'aimerais avoir plus de piste sur le type de capteur qui vous viendrais en tête quand vous pensez à une détection de trou sur une surface à parcourir voilà tout
- Forthman aime ceci
#30
Mike118
-
- Administrateur
-
- 9â¯969 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 15 mars 2019 - 01:38
Si "voir" et ou "entendre" ne suffisent pas, touche ...
Le toucher ne se limite pas aux microrupteurs.
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#31
Sandro
-

- Modérateur
-
- 1â¯262 messages
Pilier du forum
- Gender:Male
Posté 16 mars 2019 - 05:03
Une solution de "touché" pourrait être un ensemble de capteurs disposés en rayons. Chaque rayon étant constitué d'une toute petite roue (genre diamètre 5mm), montée sur une tige (radiale) relié par une liaison glissière au centre de ton robot. Un ressort force la tige à s'écarter du centre de manière à plaquer la roue sur la paroi du tube. S'il y a un trou, une ou plusieurs roues vont "tomber" dedans, entraînant un petit déplacement de la tige. Si tu mets un petit, trou dans la tige, tu peux alors utiliser une photodiode + LED pour détecter le changement (une photodiode ou une LED ne coûtent quasiment rien). A noter qu'il faut concevoir la "tige" de manière à ce que la roue ne puisse pas s'enfoncer de plus que son rayon (ou mieux même un peu moins) dans un trou pour éviter de bloquer la roue. Pour savoir la taille du trou, il faut juste compter combien de roues adjacentes s'enfoncent.
A noter cette solution n'est probablement pas adaptée à tous les diamètres : pour un diamètre trop petit, la miniaturisation risque d'être compliquée, pour des diamètres trop gros, il te faut beaucoup de rayons, donc ça commence à faire cher. Je pense que l'idéal est un diamètre aux alentours de 20cm.
Sinon, est-ce que tes tubes sont lisses (en PVC, plexi, ...) ou fortement rugueux (béton, ...). Sont-ils propres ou sales?
S'ils sont lisses et propres, alors tu peux peut-être te baser sur la réflexion de la lumière : tu as alors 3 options:
1) Tu émets de la lumière et tu mesure l'intensité de la lumière réfléchie : si tu constate une différence, c'est qu'il y a un trou. À noter que mêmes les matériaux transparents réfléchissent en général une petite partie de la lumière, surtout en lumière rasante. A noter qu'il faut que ton éclairage puisse délivrer une puissance élevée si besoin et/ou que tu puisse régler l'amplification de ton signal, de manière à pouvoir aussi bien travailler avec des matériaux qui réfléchissent bien qu'avec des matériaux plutôt absorbants ou transparents.
2) Détecter que le rayon réfléchit ne n'arrive plus à l'endroit prévu car il n'est soit plus réfléchit, soit sur une surface plus loin (trou non traversant).
3) (fonctionne aussi si le tuyau est sale) : tu envois des flash de lumière, et tu mesures le temps pour avoir une réflexion/diffusion : si tu as un trou, ça mettra plus longtemps. A noter que les temps à mesurer sont extrêmement courts (de l'ordre de 0.01 ns de différence pour un trou de 3 mm de profondeur), du coup tu doit mesurer ce temps via un circuit électronique analogique. Je ne sais pas si tu maîtrise l'électronique à l'ordre de la centaine de GHz (ça n'a plus rien avoir avec l'électronique basse fréquence comme en la voie au lycée).
A noter qu'utiliser des flash plutôt qu'un éclairage continu permet de diminuer significativement la consommation d'énergie et l'échauffement.
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
#32
Oracid
-

- Modérateur
-
- 6â¯769 messages
Pilier du forum
- Gender:Male
Posté 18 mars 2019 - 07:32
Je pense qu'un BL-Touch comme ceux utilisés sur les imprimantes 3D devrait faire l'affaire.ma question c'est quel capteur/dispositif me conseillerez vous pour détecter les trous dans un environnement sombre; faites moi des propositions je me charge des tests et du choix, c'est juste que je n'ai pas beaucoup d'idée de dispositif simple et efficace.
Le BL-Touch serait monté sur une hélice, ou demi-hélice (palonnier), à l'avant du robot.
L'hélice ne serait pas en rotation continue, mais en rotation alternative de 360°.
A chaque fois que le robot avancerait de par exemple 1mm, le BL-Touch à l'extrémité de l'hélice scannerait le tube sur 360°.
Pour le reste, ce n'est qu'une question de programmation…
- esuzen aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users





{kind=link}