

Bonjour à tous, amis makers !
Ce sujet est dédié au développement du robot SpaceDog qui est (sera) un robot quadrupède inspiré en grande partie par l'Opendog project de James Bruton. Nous sommes un groupe d'étudiant travaillant pour la start-up Thespace.eu et notre mission est de réaliser le SpaceDog afin de promouvoir la start-up et l'ensemble de ses partenaires. Le projet est totalement Open source et nous cherchons constament des avis d'experts (ou amateurs) en robotique afin de mener à bien notre projet, donc si vous êtes intéressé pour participer à l'aventure c'est ici que ça se passe ! Tout apport au projet est le bienvenue alors n'hésitez surtout pas 
Pour commencer pour ceux qui ne connaissent pas le projet OpenDog voici un lien youtube pour que vous puissiez le découvrir : https://www.youtube....a0eiUTsCAPi_mZf
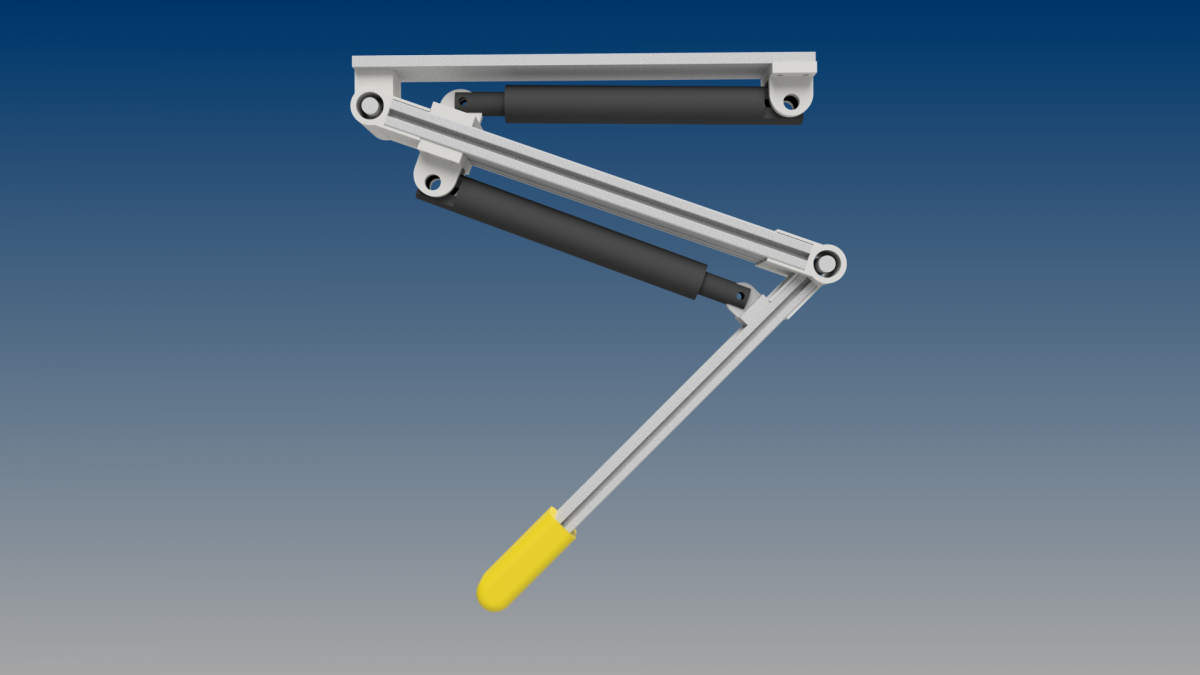
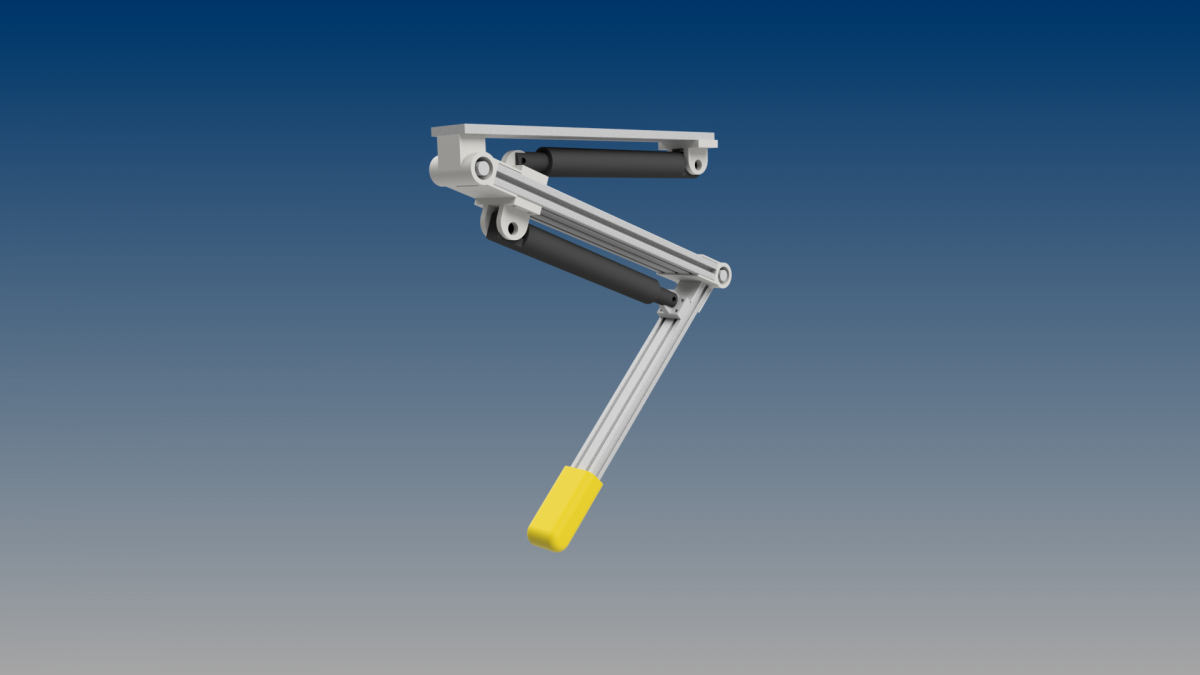
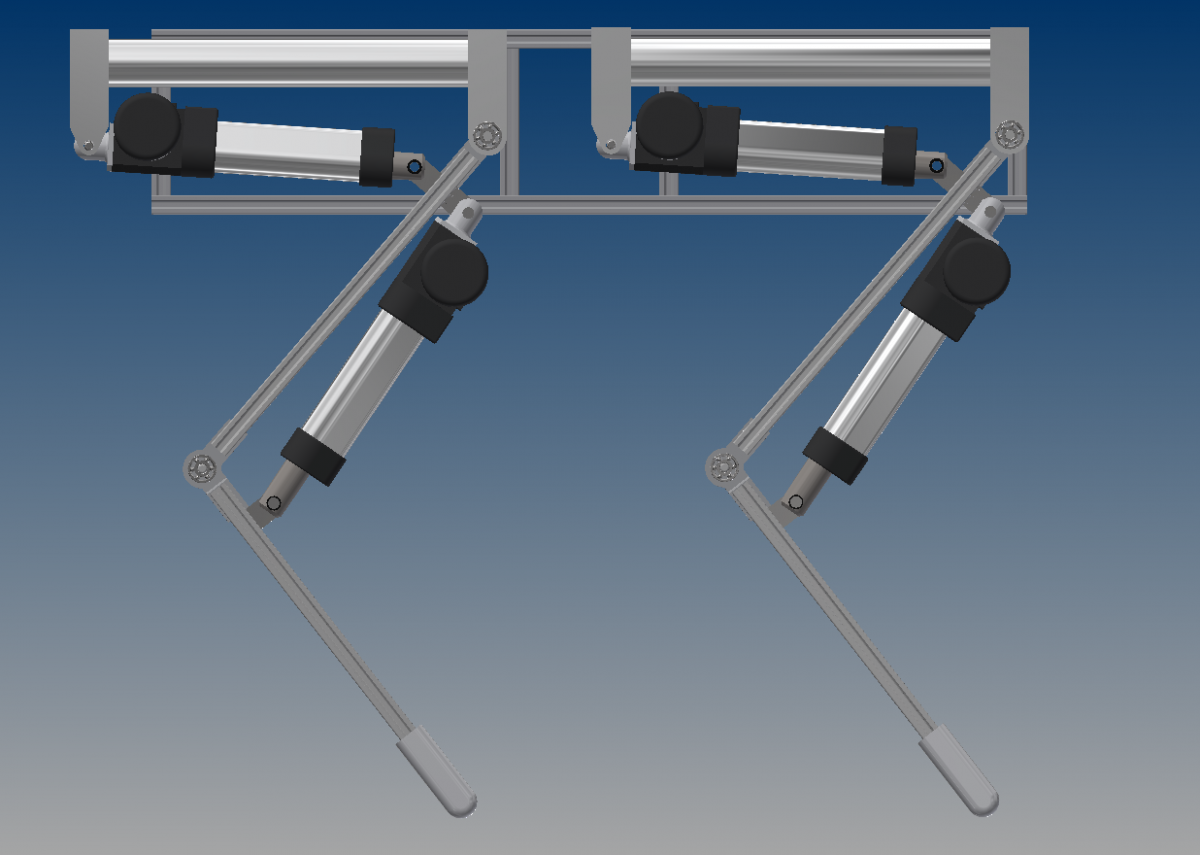
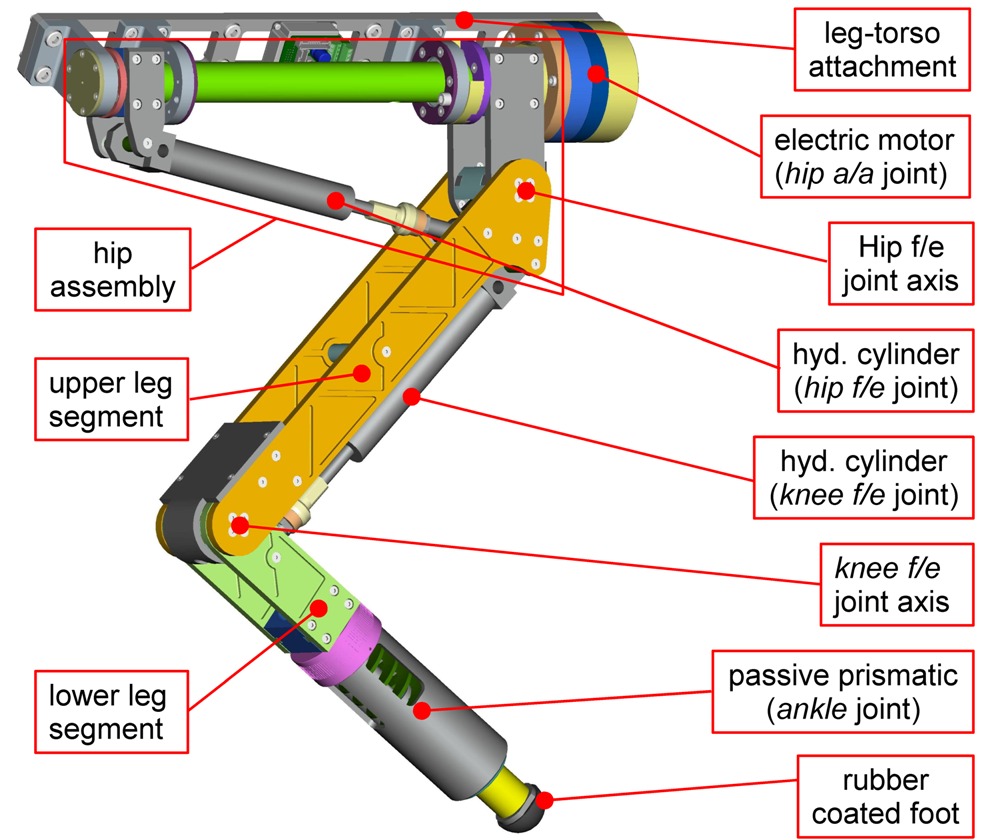
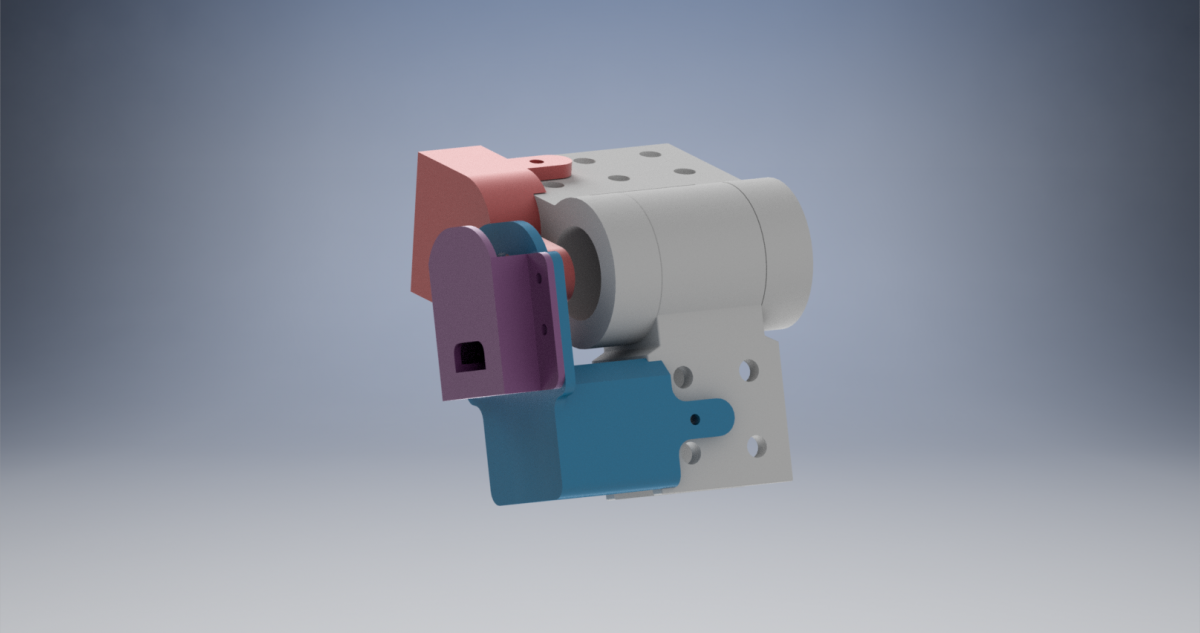
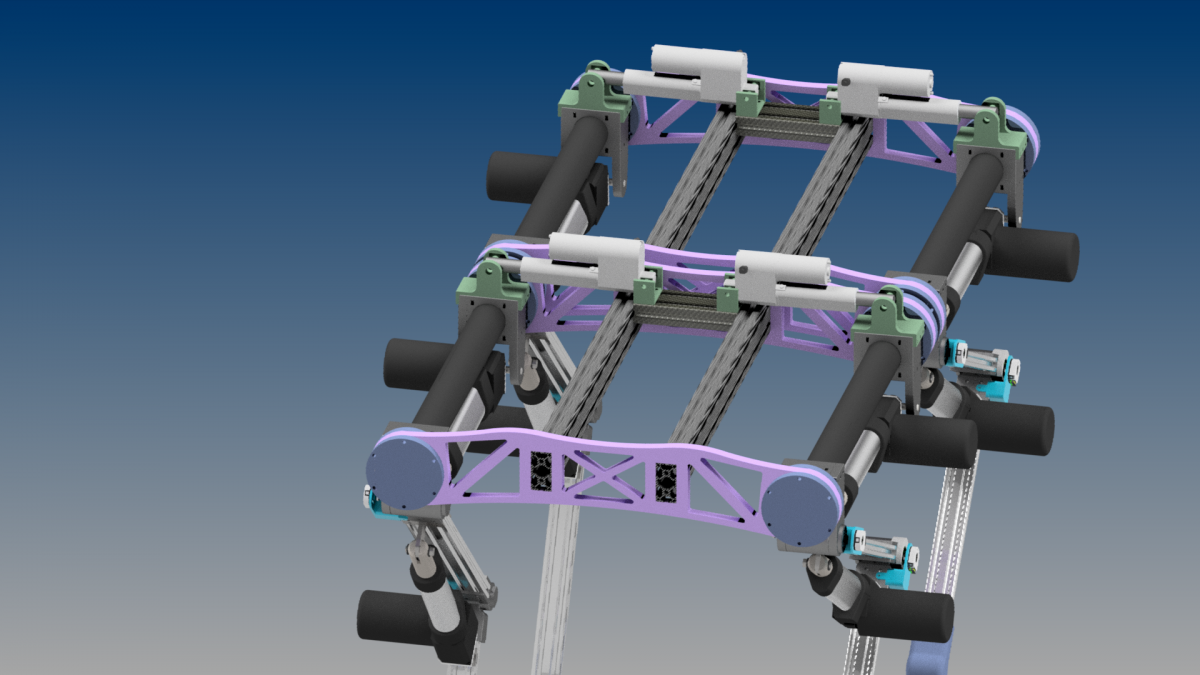
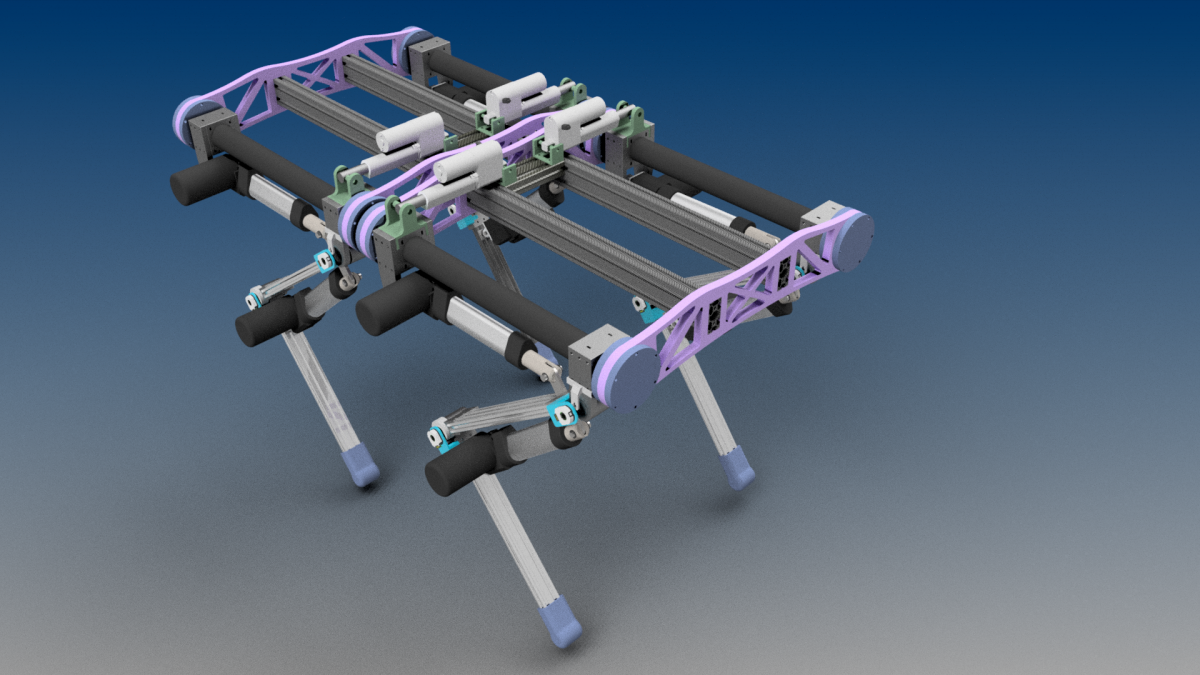
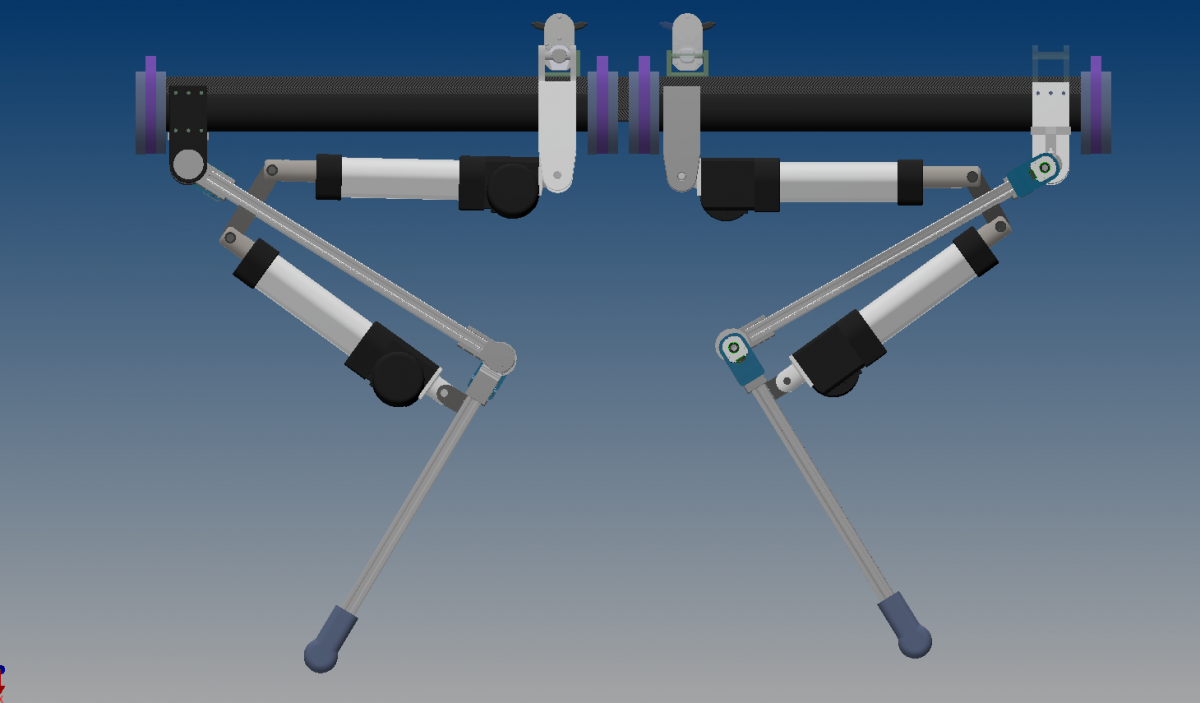
La première étape de notre projet a été l'analyse de l'existant (Opendog original), et nous avons choisi d'opérer quelques modifications sur celui-ci afin de l'améliorer. La première modification consiste à changer les actionneurs des pattes et de choisir sur une mécanique plus "épurée" en optant pour des vérins électriques comme vous pouvez le voir ci-dessous :
Nous cherchons actuellement des vérins électriques qui répondent à nos besoins, nous posterons l'avancé de nos travaux régulièrement.
A bientôt, l'équipe SpaceDog !
PS: n'hésitez pas à échanger sur le sujet et nous donnez vos idées ! 














 )
)

 On a besoin d'aide pour choisir le moteur adapté, en se tournant vers les moteurs utilisés par James Bruton sur le projet Opendog
On a besoin d'aide pour choisir le moteur adapté, en se tournant vers les moteurs utilisés par James Bruton sur le projet Opendog 

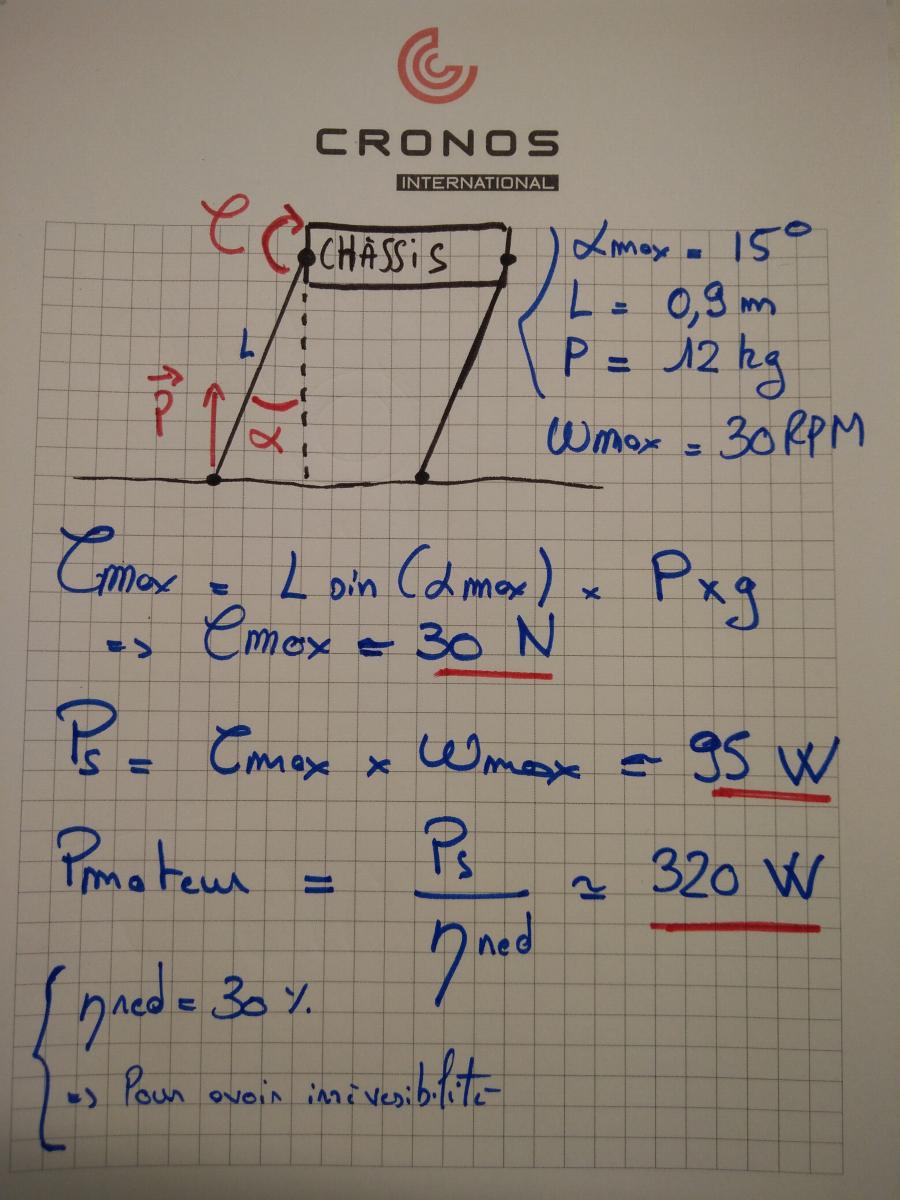

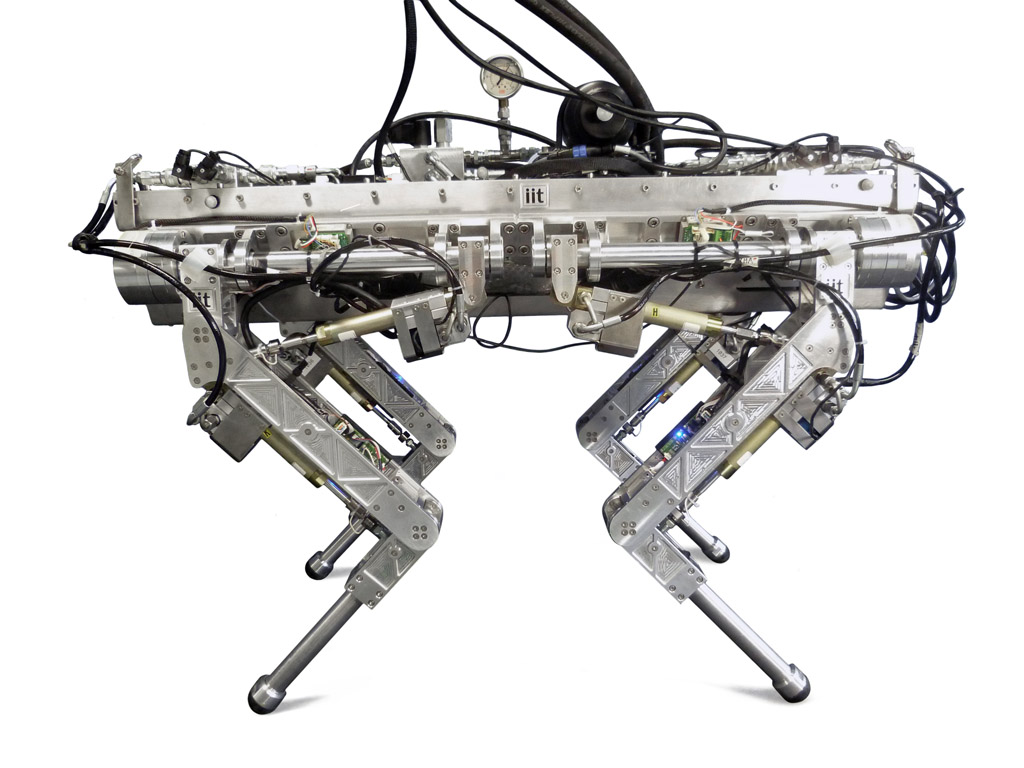
 . De plus ce type de système est très lourd et notre robot aurait vite pris des kilos en trop.
. De plus ce type de système est très lourd et notre robot aurait vite pris des kilos en trop. 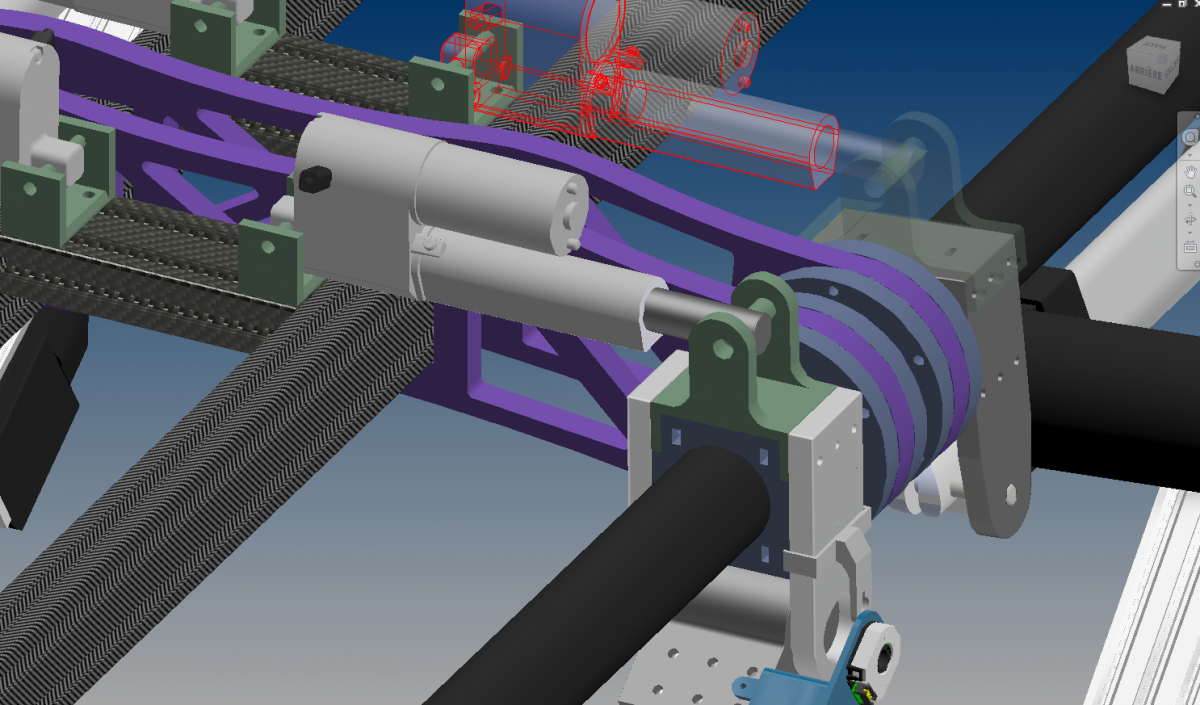
 .
.
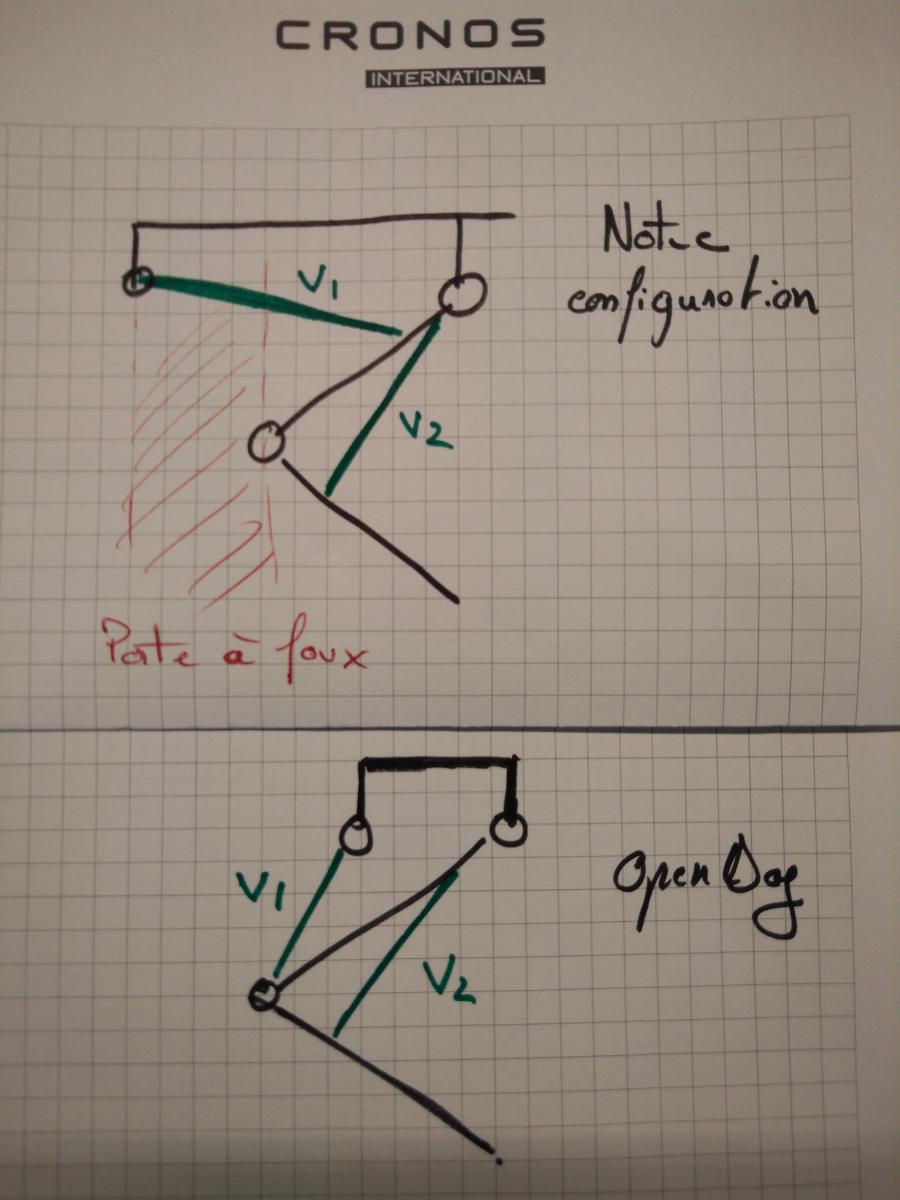
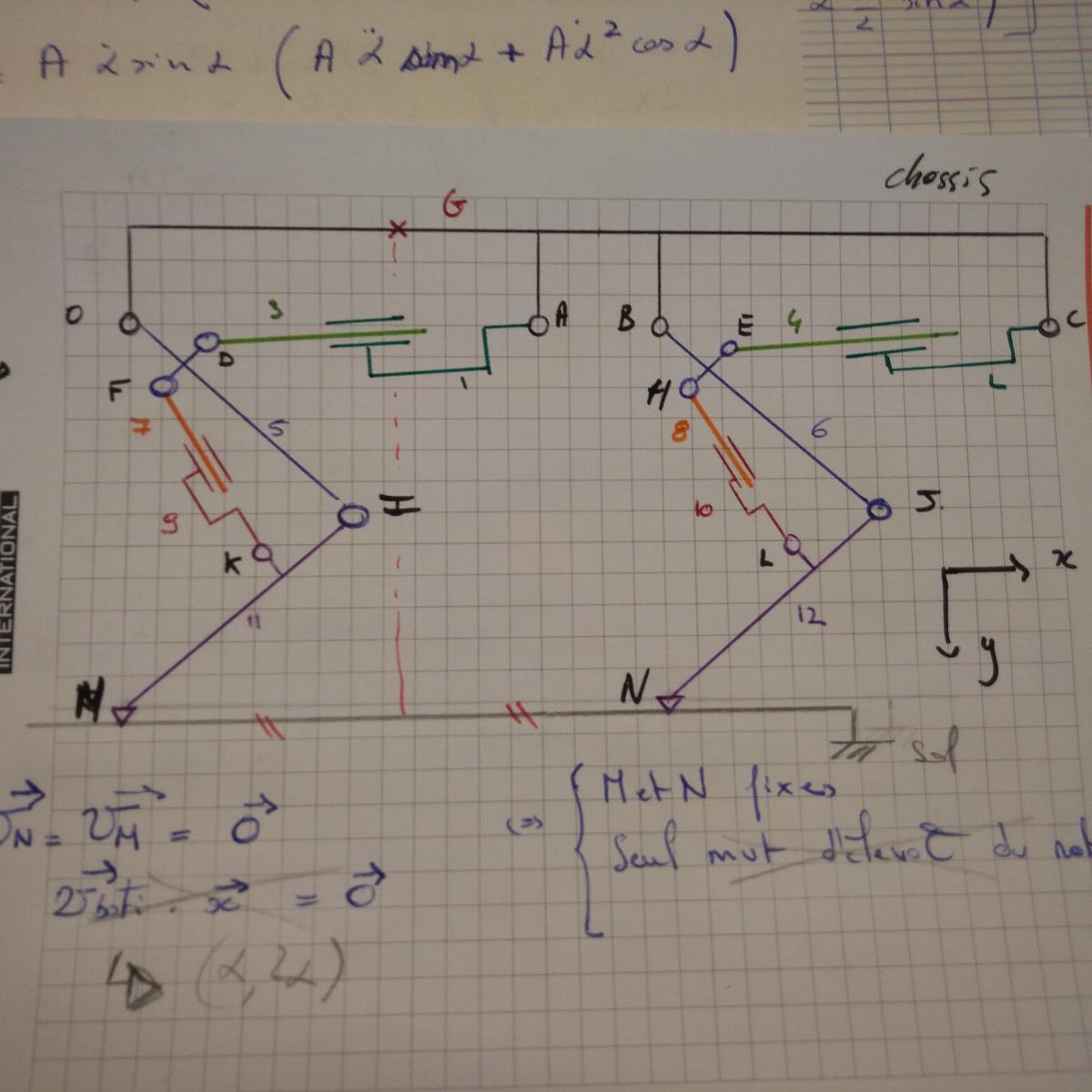
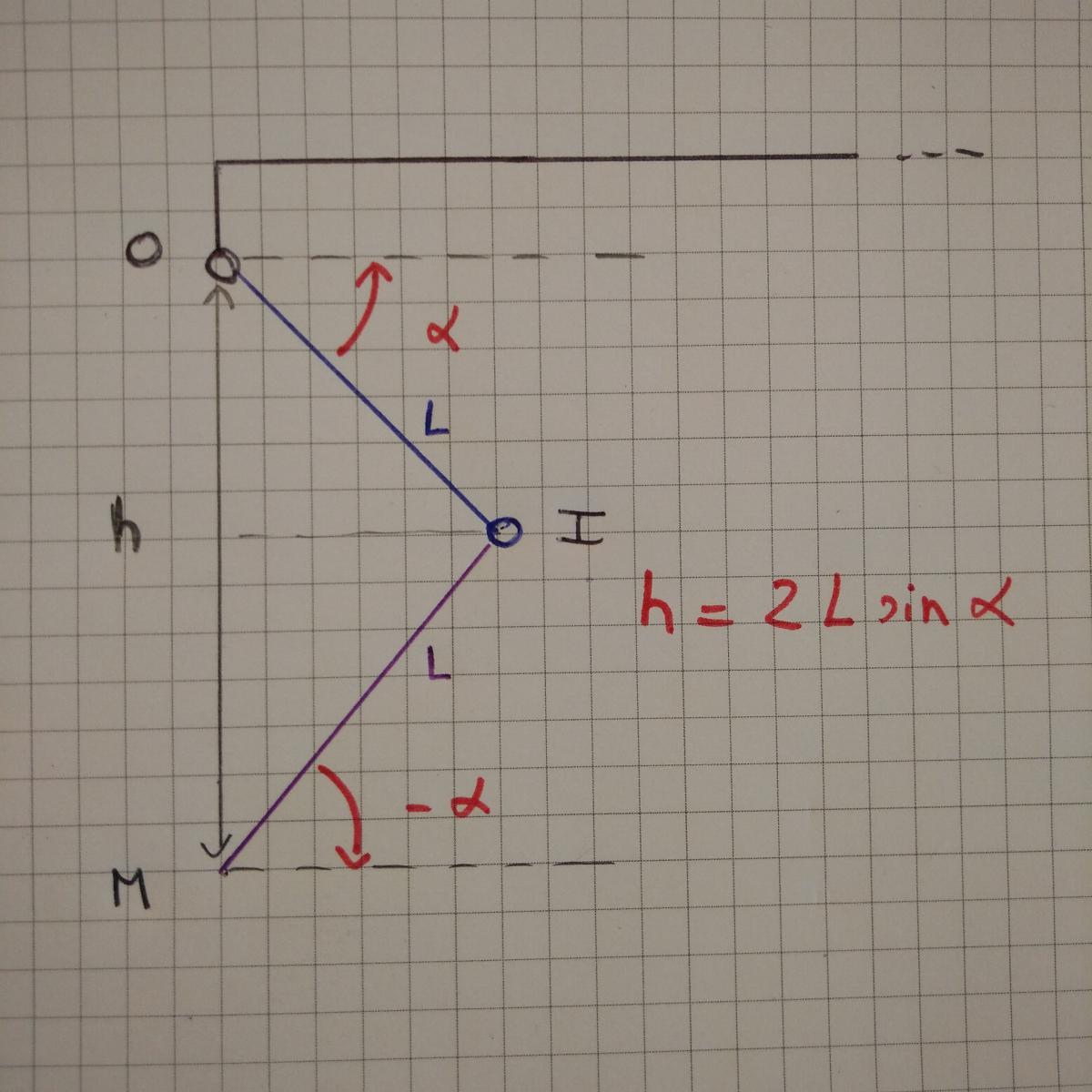
 Je vais étudier un peu cette configuation par curiosité.
Je vais étudier un peu cette configuation par curiosité.











