Plus de 2 ans après mon inscription, je me lance dans l'aventure du robot .
C'est mon premier et son but principal est initiatique : je ferais des erreurs, je ferais marche arrière (ou pas) mais je veux apprendre !
Je le souhaite évolutif au fur et à mesure de mes envies.
L'objectif d'Hashtag est de patrouiller sur mon terrain en autonomie .
Je compte faire un chemin de coordonnées GPS et le robot devra les suivre pour faire sa ronde et retourner à sa base de rechargement.
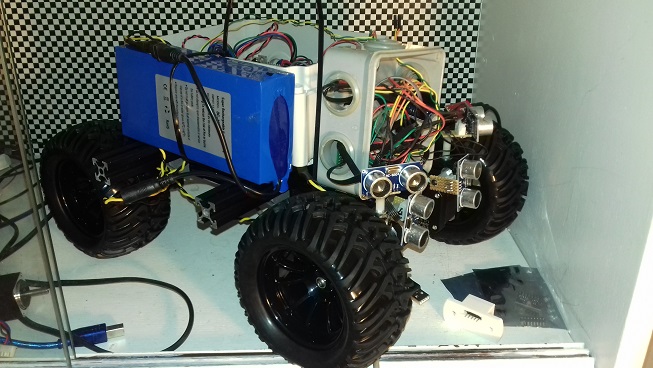
Pour l'instant il est en 4 roues motrices et a un chassis en # d'où son nom ...
Je suis nul en découpe donc pas question de modifier la longueur de mes profilés
 .
.Niveau matos dans le désordre, on a actuellement :
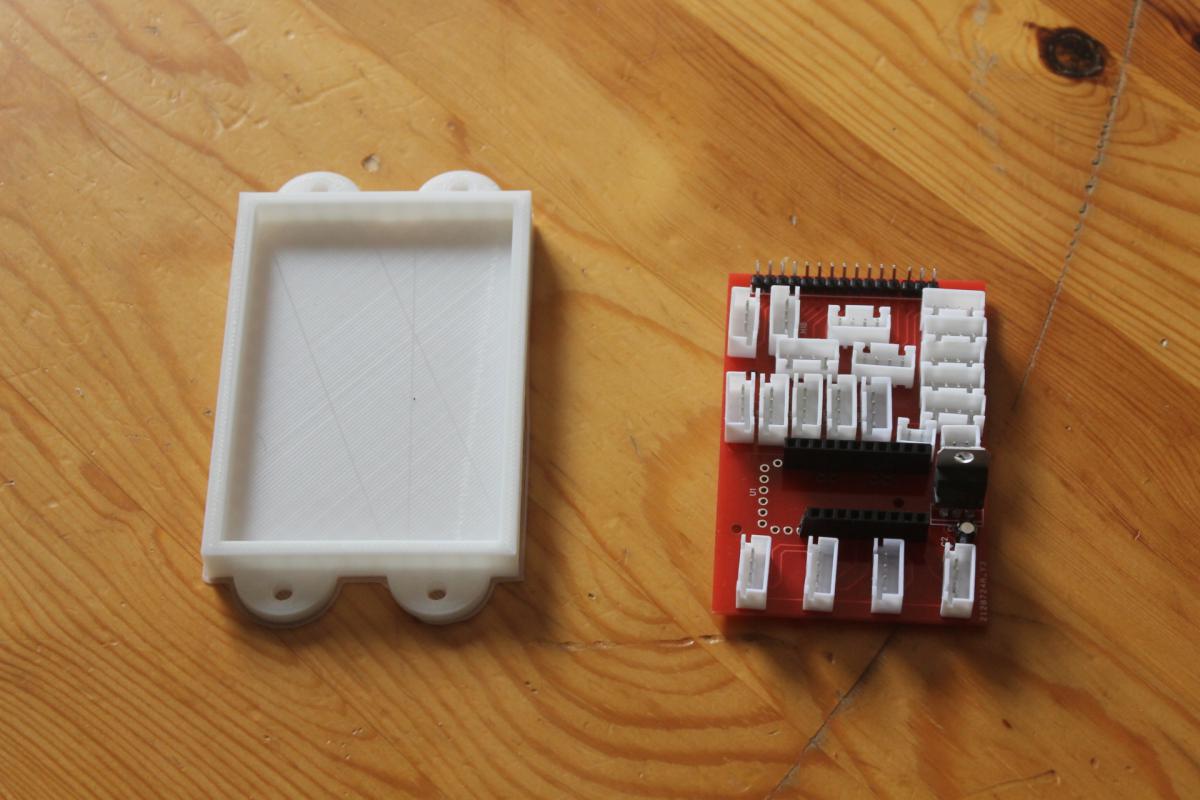
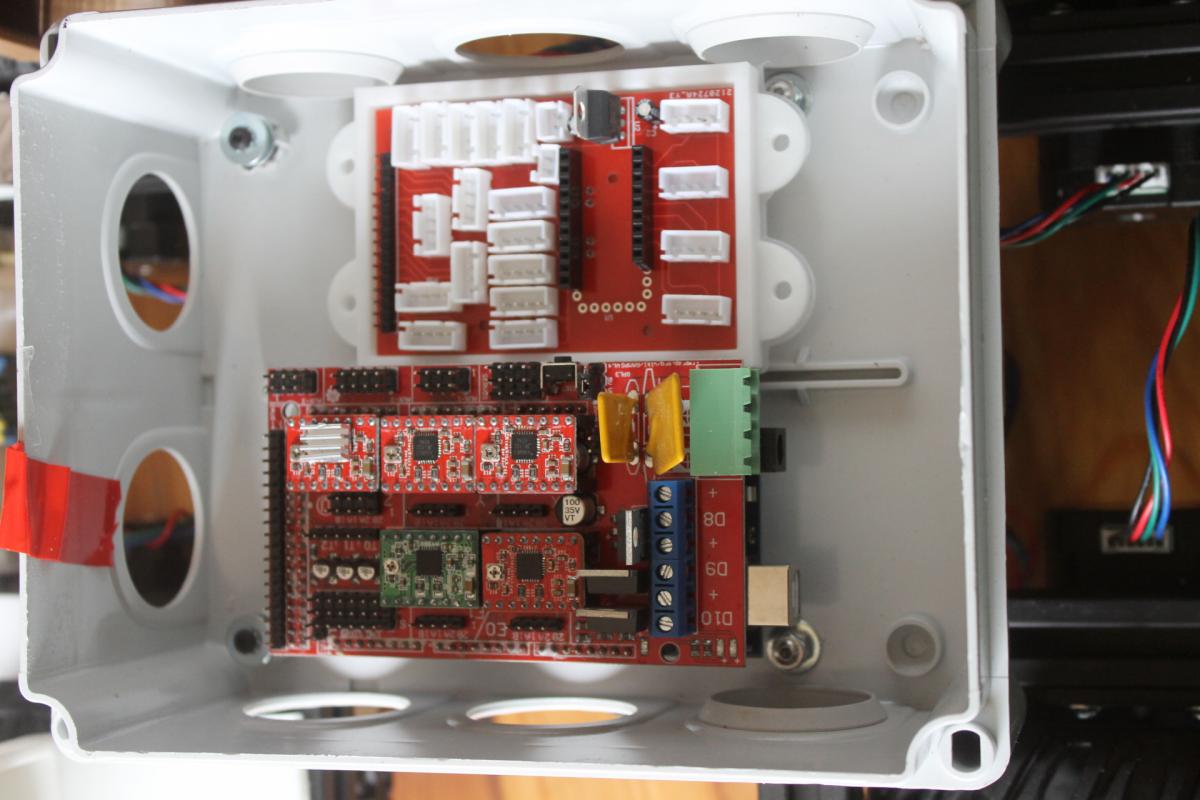
*Electronique :
- Ramps 1.4 + Mega
- Moteur PàP type Nema 17 x 4
- module GY-271 : compas électronique
- module GPS Adafruit
- Batterie Li-ion 12V 20000mAh rechargeable (en attente de réception)
*Mécanique :
- châssis en profilé alu 20x20 type Imprimante 3D
- équerres en alu
- roues de 4x4 de modélisme ( à changer ??)
- coupleurs entre les Nema 17 et les roues
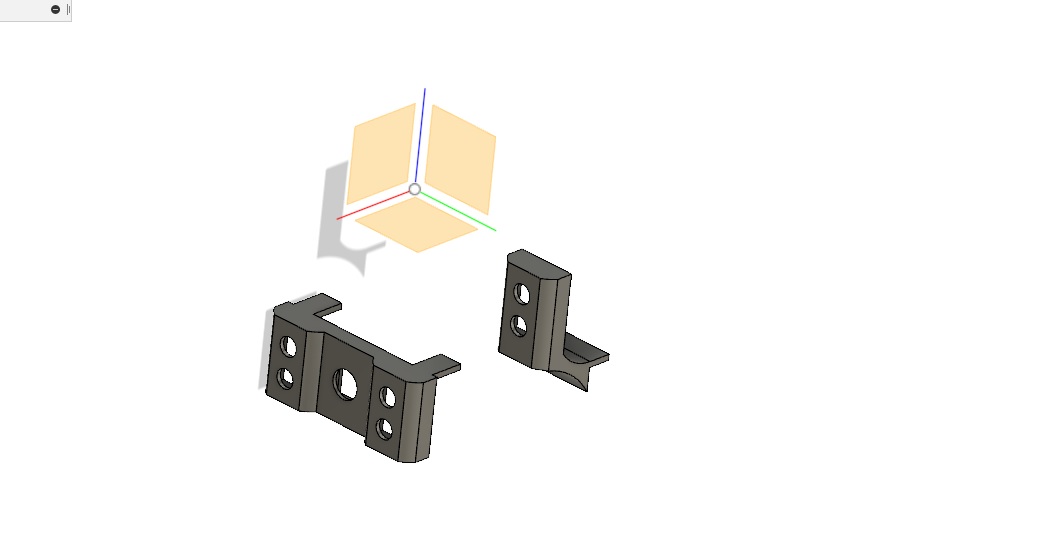
- support pour Nema 17 en alu (il m'en manque 2)
Vite fait quelques étapes de développement prévues/réalisées :
[OK] / [ à faire ] / [ en cours ] / [ pour plus tard]
- Contrôle des Nema 17
- Prise en main du GY-271
- Montage du chassis , moteurs et roues
- Prise en main du module GPS
- Coder le suivi d'un cap
- Intégrer l'électronique
- Etablir une liste de coordonnées GPS
- Mettre en place un système de détection/évitement d'obstacles
- Mettre en place 2 ou 3 capteurs
- Mettre en place un éclairage (pour le debug à distance ..et le fun)
- Retour d'info via ondes radios ???
- Intégration d'un Rpi + Caméra
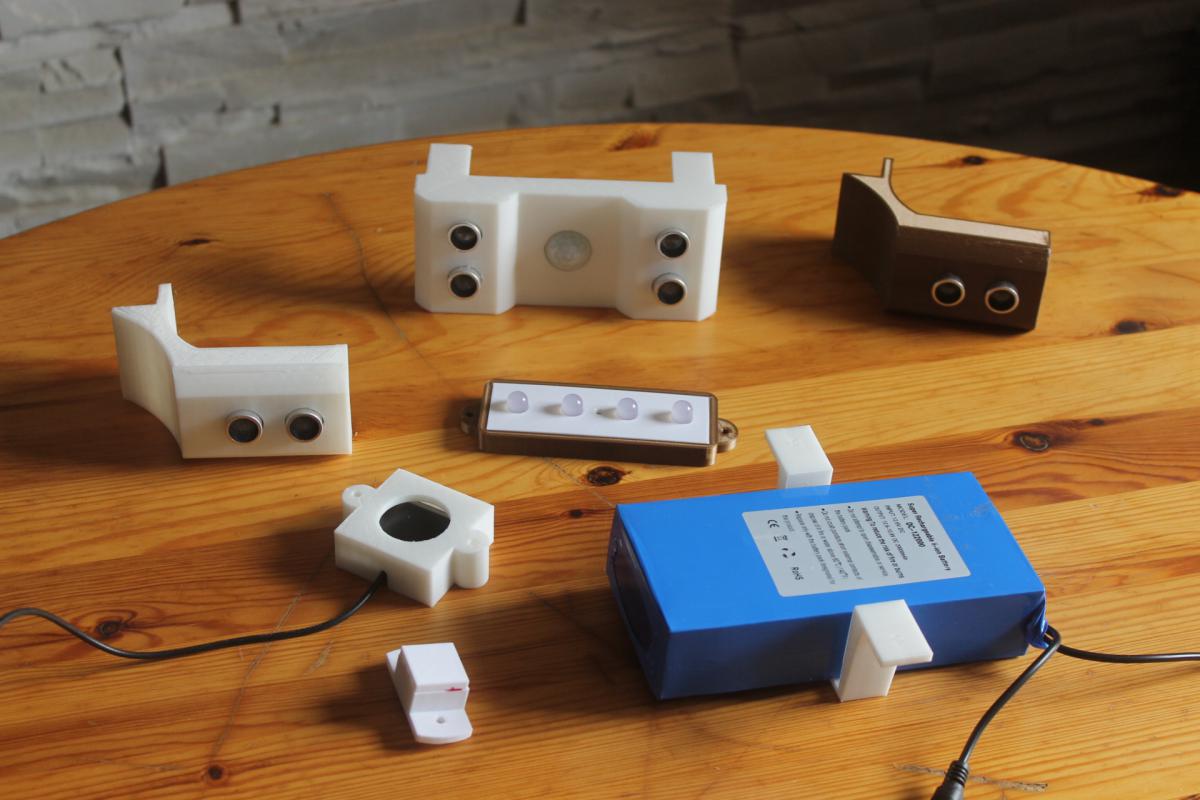
- Habillage en impression 3D
- Améliorer/Augmenter la garde au sol
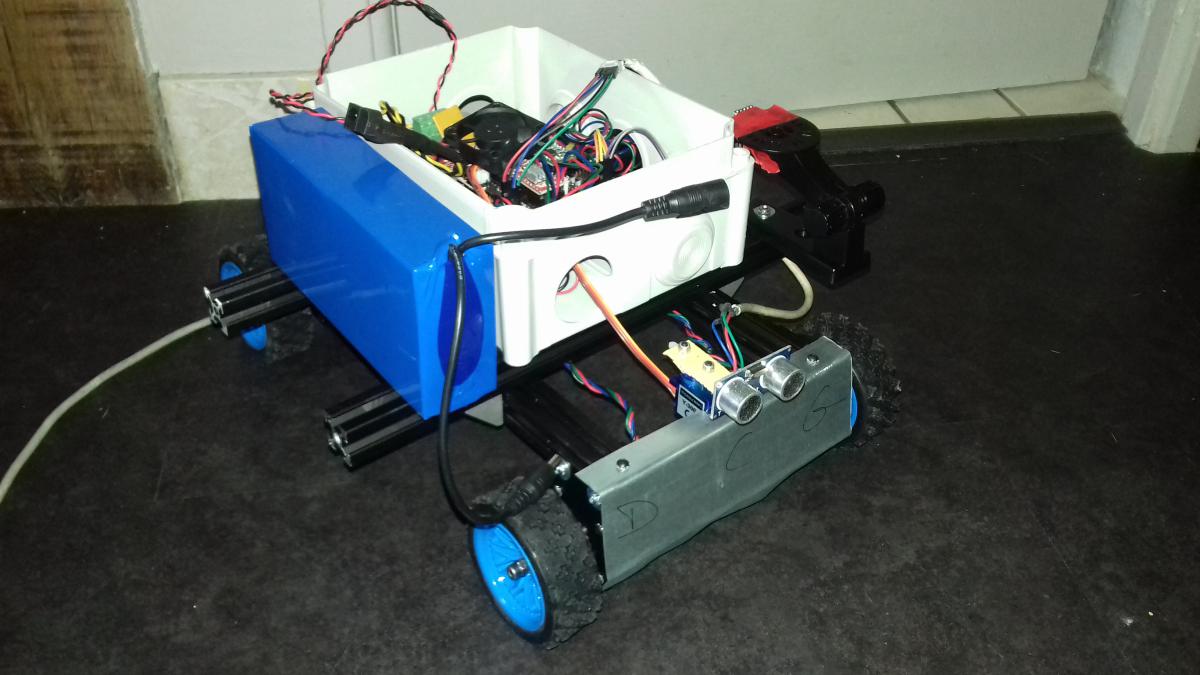
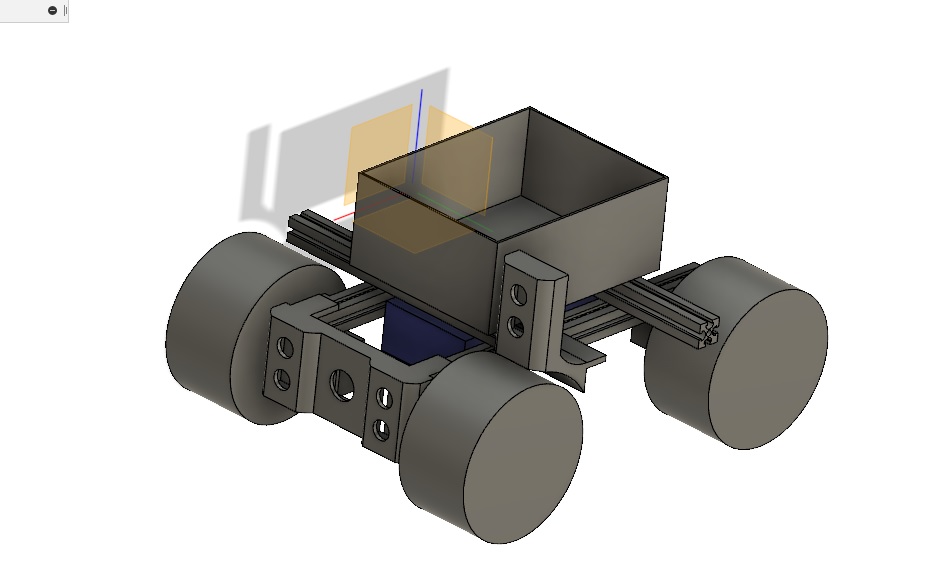
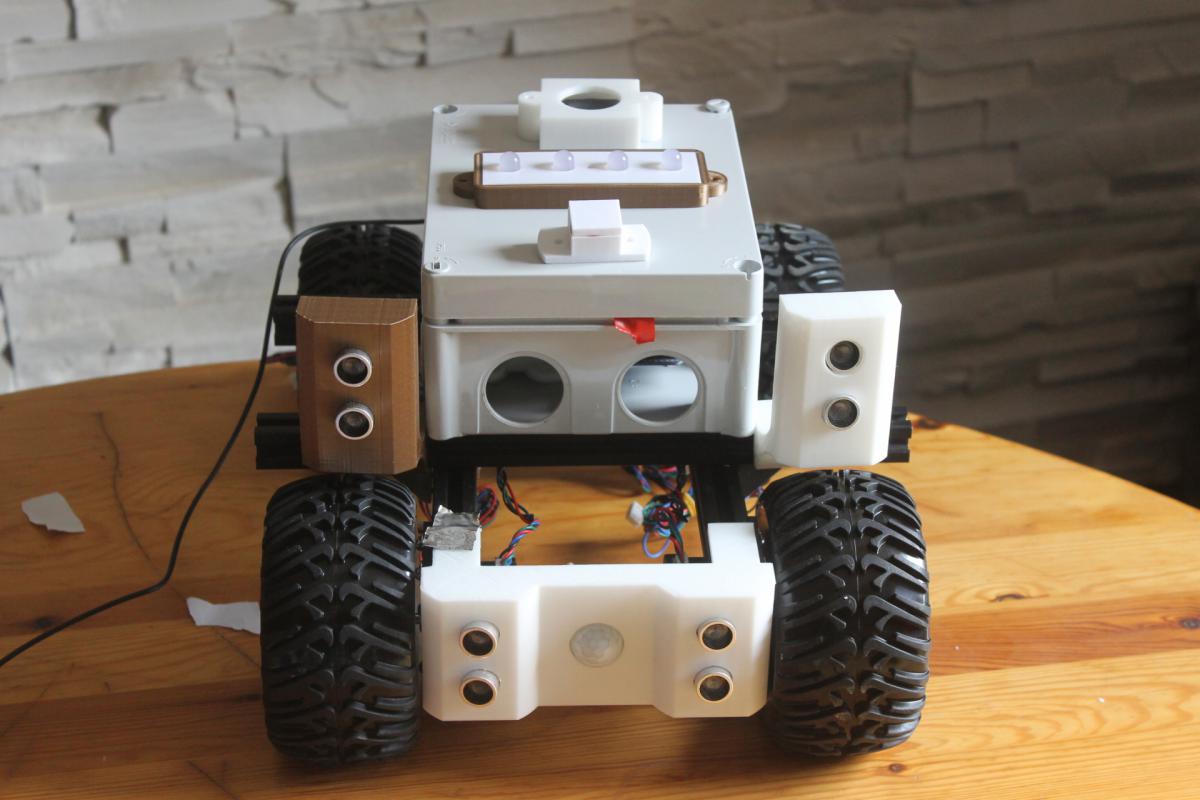
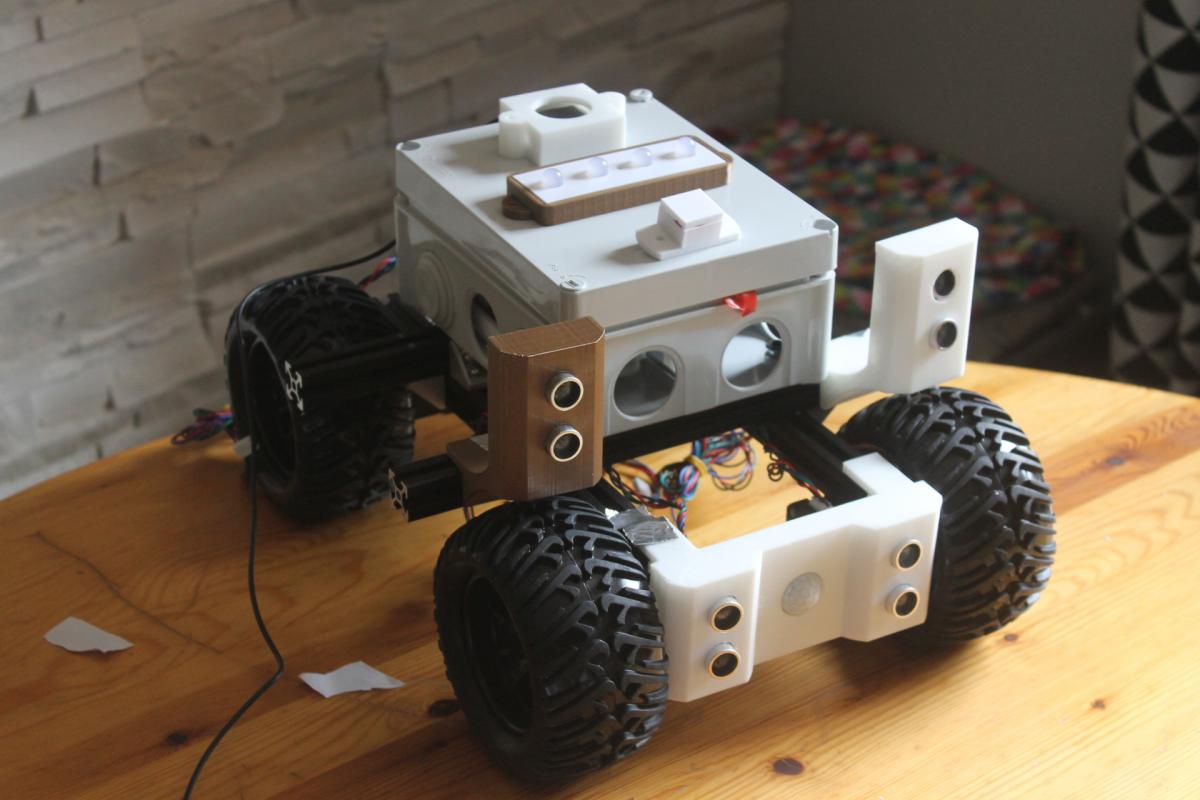
Ca ressemble à ça pour l'instant :

A plus !