Voici un nouveau projet. L'idée m'a été soufflée par Sandro qui fait également un projet similaire, https://www.robot-ma...tion-de-speleo/
L'objectif est donc de faire passer un robot dans un couloir de maximum 35cm de large. Cette situation semble assez courante en spéléologie.
Sandro mettra sans doute une caméra sur son robot alors que moi, je me limiterai aux conditions de roulement sur les parois.
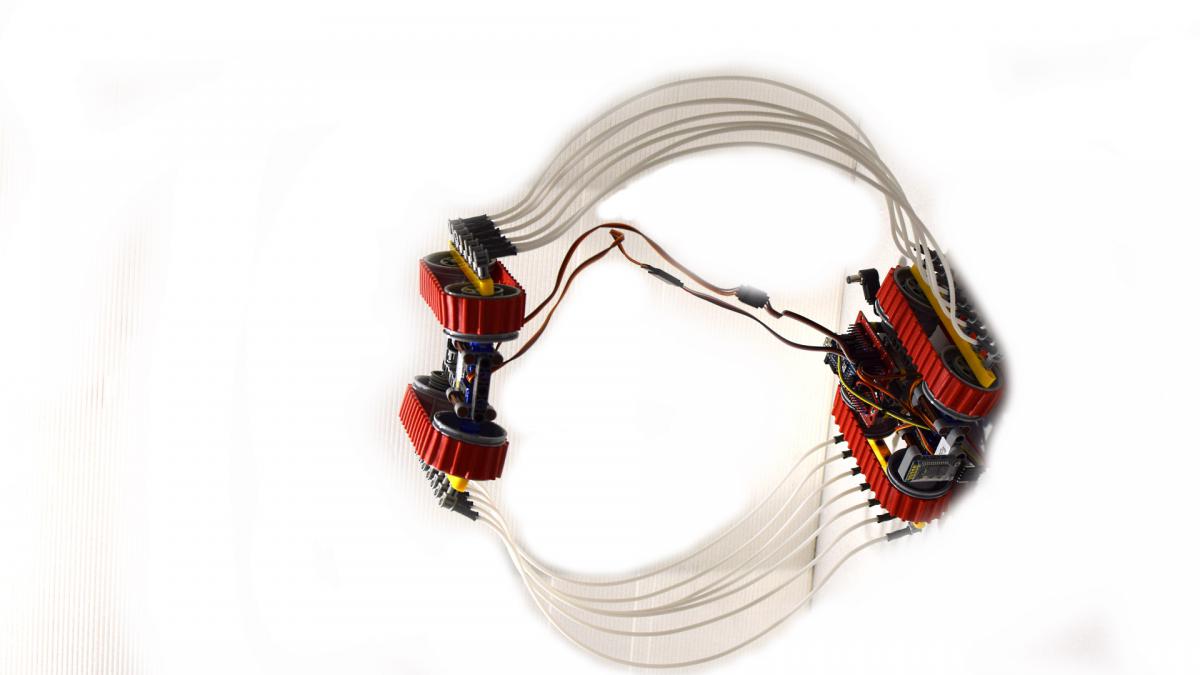
Sur les photos, vous pouvez voir un premier jet basé sur 2 véhicules à 4 roues bloquées, reliées par des barres de torsion.
Chaque véhicule roulera sur une des 2 parois. Les barres de torsion devraient plaquer les plateformes sur les parois.
Mon robot sera radiocommandé. Mon objectif est de résoudre un problème mécanique et non pas de faire un vrai robot.
Pour commencer, je me limiterai à faire rouler mon robot verticalement et horizontalement sur des parois verticales et lisses.
Une fois ceci acquis, je verrai pour la suite.