


Bonjour,
Du coup, je vous présente le projet sur le quel je suis en train de réfléchir.
Le but serait de créer un robot pour l’exploration spéléo, en particulier pour aller faire de la reconnaissance dans les méandres étroits.

Un méandre (voir image) est une zone dont le fond a été creusé de plus en plus profond par l’écoulement de l’eau, et qui crée donc une espèce de « fissure » (mais en moins régulier qu’une vraie fissure) bien plus haute que large, et qui souvent serpente un peu (comme les méandres des fleuves). C’est une formation qu’on trouve assez souvent en spéléo, avec des largeurs allant de quelques centimètres à quelques mètres.
Là où ça devient problématique, c’est quand le méandre est trop étroit pour pouvoir passer de profil : soit on élargit le passage (très laborieux, mais permet de poursuivre l’exploration si ça s’élargit derrière), soit on abandonne l’exploration.
Je voudrais donc fabriquer un robot capable de se déplacer dans ces méandres étroits de manière à aller voir si ça s’élargit derrière ou pas (élargir sur 2m de long n’est pas un problème, mais on ne vas pas aller élargir sur 100m).
Les deux gros challenges sont d’une part que le terrain est plus ou moins vertical, et d’autre part qu’il est assez irrégulier.
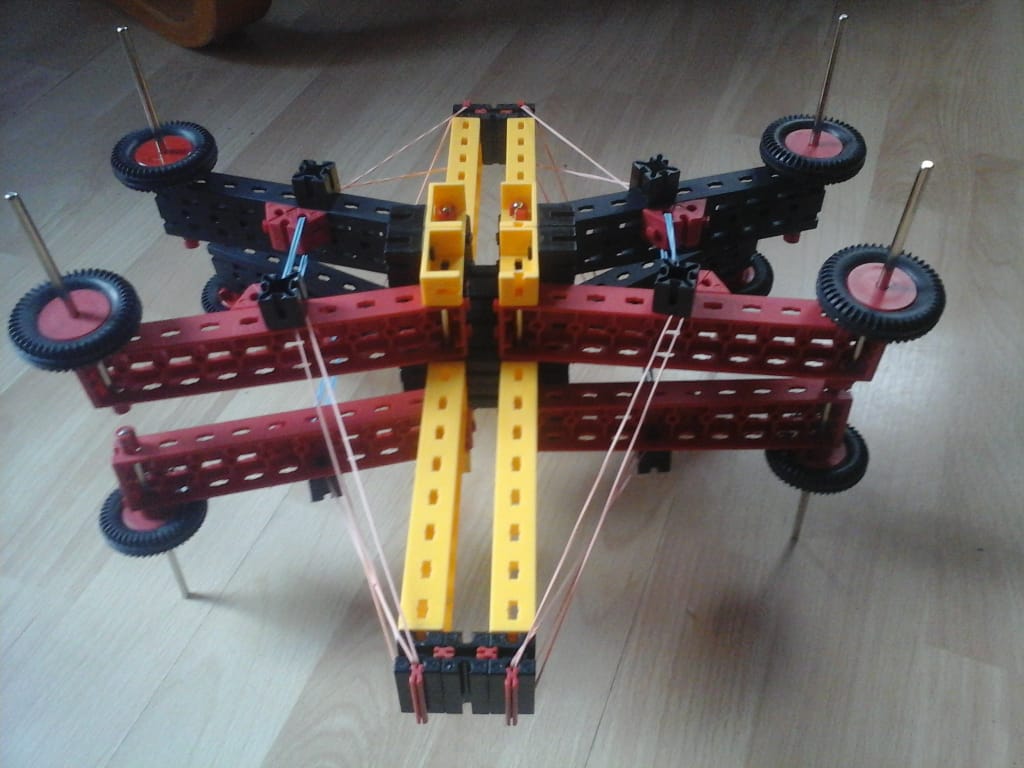
Mon idée est de faire un robot à 8 « roues » montées chacune sur un « bras » a 1 degré de liberté. En gros, je voudrais faire 2 « X » horizontaux (avec les roues au bout de chaque branche), l’un en dessous de l’autre. Les 4 segments du X étant tous reliés par un pivot.
De plus, le terrain étant peu prévisible, je comptais avoir une grande élasticité entre les segments des « X », de manière à ce que le robot s’adapte de tout seul au terrain.
Pour l’instant, j’ai fait une première « maquette » non actionnée (à l’aide d’un jeu de construction), avec de simples élastiques de cuisine.

Pour l’instant, ma première grande interrogation est de savoir quoi utiliser en guise de « roues ». En effet, les roues en plastique dur que j’ai utilisé glissent très facilement quand utilisé perpendiculairement au sens d’avancé.
Il me faudrait donc des roues capable de résister à une importe force latérale (tout le poids du robot) et avec un fort coefficient de frottement (pour diminuer la force à exercer contre les murs, ainsi que pour pouvoir envisager des méandres qui s’élargissent vers le bas).
L’idéal serait d’avoir le même coefficient de frottement dans toutes les directions (ça permet aussi d’aller vers le haut ou vers le bas), sinon au moins un fort coefficient de frottement dans la direction de l’axe des roues.
Pour l’instant j’ai pensé soit à des roues en plastique « mou » ou à chambre à air (mais c’est pas le même coefficient de frottement dans les deux sens), ou alors de fabriquer des roues à partir de balles en mousse (même coefficient de frottement, mais je sais pas s’il est élevé).
Est-ce que vous avez des idées ?
Ou d’autres idées/suggestions/questions par rapport au projet ?
Merci d’avance
Sandro























