


Je voulais vous présenter un autre robot créé en duo avec l'artiste Maner Shnetzlon, destiné cette fois-ci à du spectacle, il/elle s'appelle *Magh.
Le but principal de ce robot est de pouvoir interagir avec un truc qui bouge mais qui puisse être plus grand qu'un corps humain, qui puisse presque courir derrière, limite à le frapper mais sans aucun danger. Les bras robots, les véhicules ou autres drones étaient beaucoup trop limités et déjà vus. Et puis aller dans des robots géants avec ces technologies implique pas mal de moyens.
Faire un robot géant pas cher et pas dangereux pour aller sur scène ou dans un salon.
Notre premier essai :
Nous avons donc eu l'idée de créer *Magh, un robot parallèle à câble. Cela consiste à déplacer un mobile dans un espace quelconque (cube de 5m de côté en moyenne) suspendu au plafond par quatre câbles dont on maitrise la longueur.
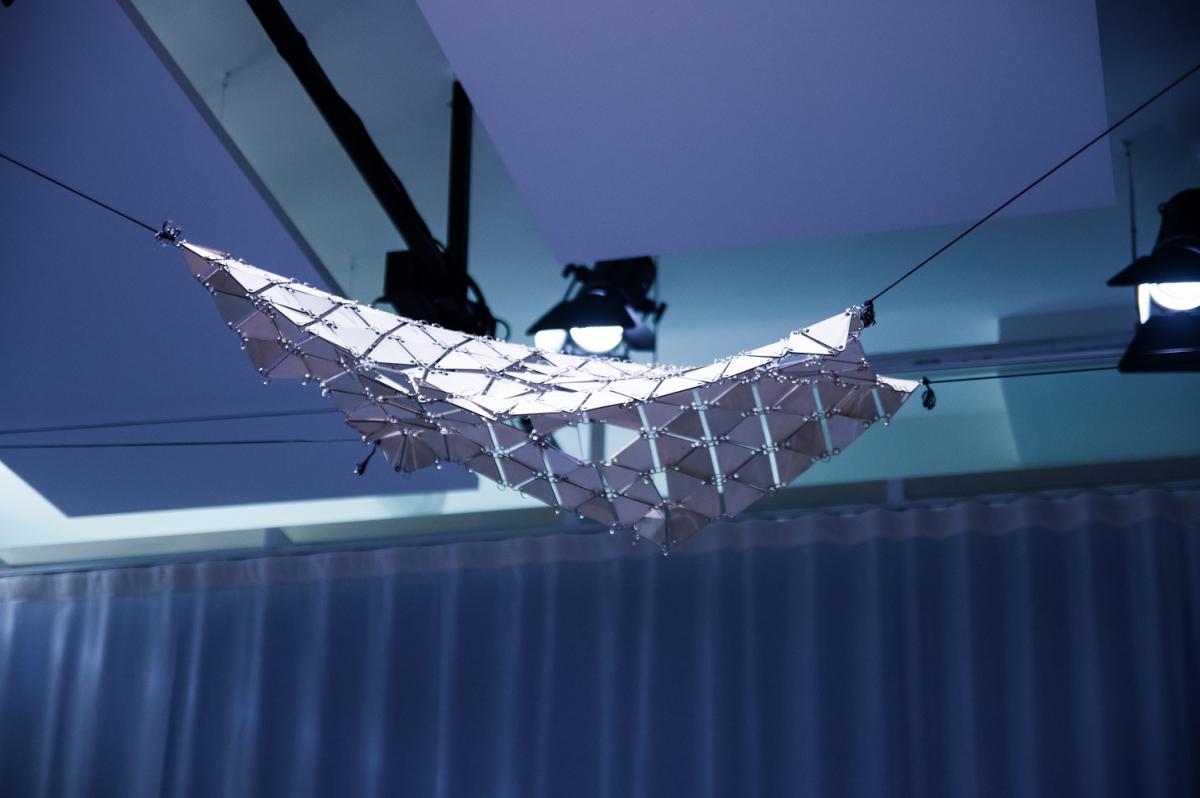
Le mobile est composé d'un tapis d'écailles en bois.
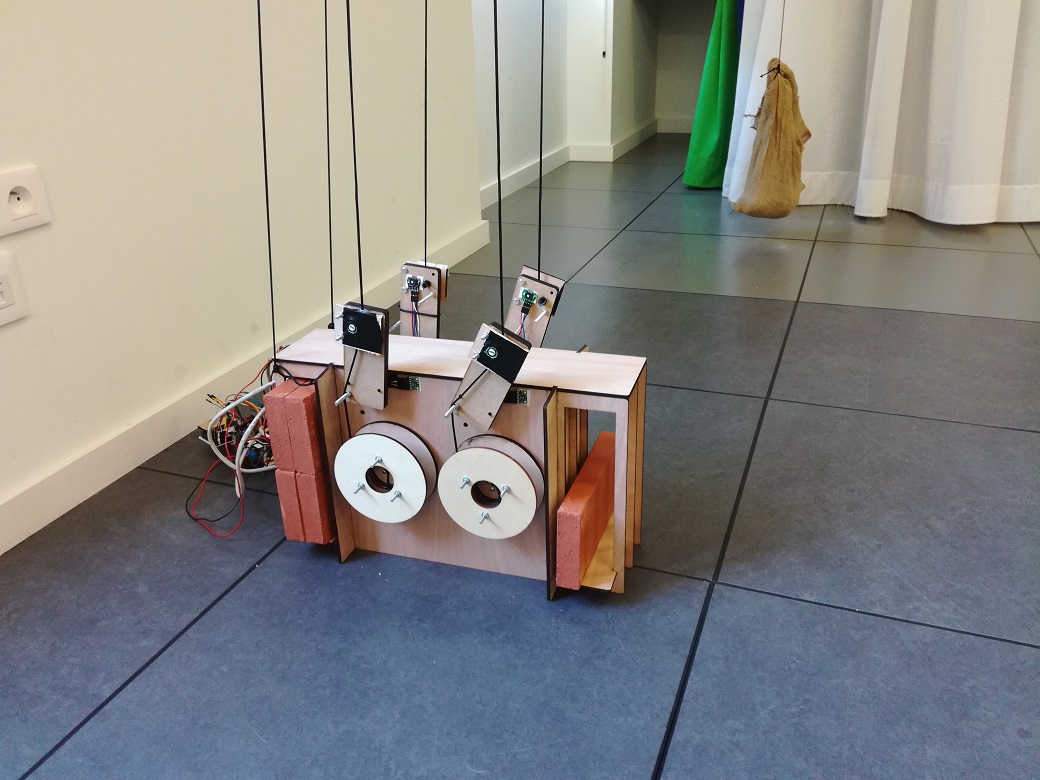
Il est suspendu au plafond par des câbles de skipper qui sont guidés via des poulies de précision à un bloc treuil posé au sol.
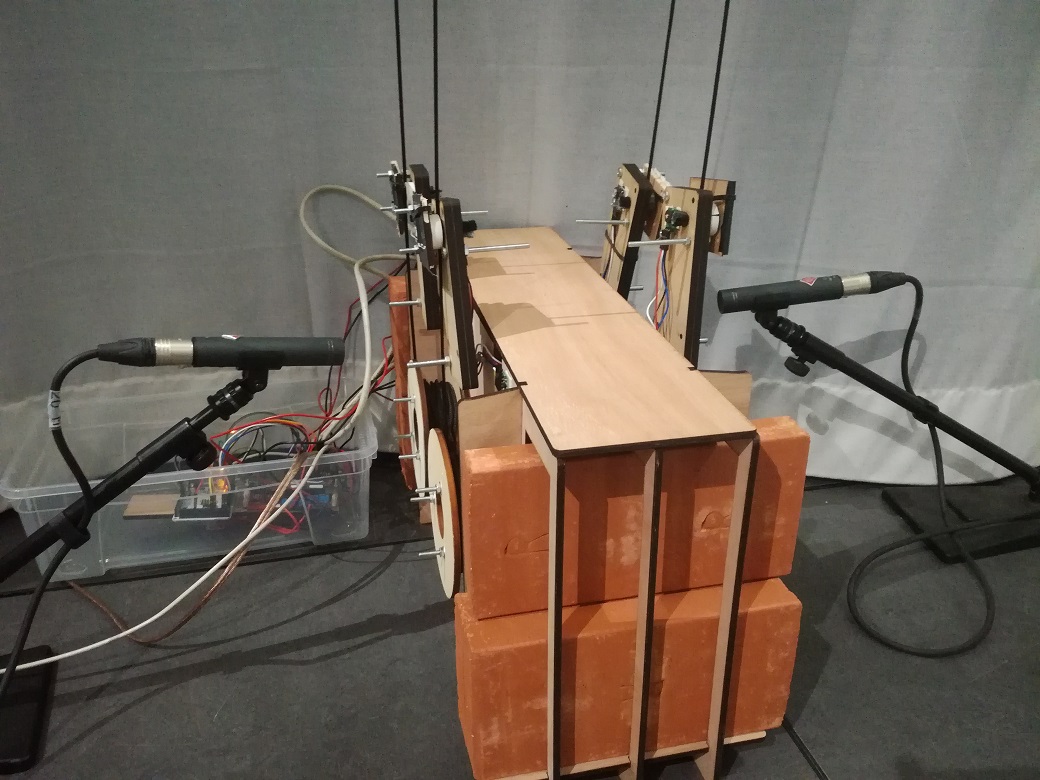
Les câbles sont équilibrés par quatre sac de sable. Si on tire sur ces câbles violemment, le treuil ne reçoit pas d'efforts mais les sacs de sable se soulèvent (testé par une classe de CM2 enflammée).
Le bloc treuil est composé de quatres moteurs puissants tournant 4 tambours. A coté des tambours se trouve un petit bras disposant d'une roulette qui roule sur le câble pour en mesurer la longueur qui passe. Le bras étant libre, si le câble est détendu, il tombe et coupe une barrière laser qui bloque le moteur afin d'éviter les noeuds.
Le tout est piloté en asservissement par une Arduino Mega reliée en wifi au PC de contrôle en régie.
Ce PC de contrôle récupère le mapping de la scène via une Kinect V2 pour détecter les corps et placer le mobile en fonction des corps.
Le PC de contrôle est aussi équipé d'une Leap-Motion afin de piloter la "grue" via la position de l'index de la main gauche en régie comme un marionnettiste.
Je commence en ce moment la documentation, avec le code, les plans et comment installer cette toile d'araignée : https://gitlab.com/ThotAlion/magh
Ce rpojet n'est pas encore terminé et il y a maintenant un travail sur l'autonomie de la machine sur scène ou dans un lieu public. Un travail aussi sur la marionnette et comment improviser.
Enfin, cette structure peut aider à concevoir d'autres robot (comme les bipèdes par exemple) afin de tricher pour qu'ils tiennent vraiment debout (j'aime tricher :-) )
Voici quelques vidéos avec la compagnie KDanse de Jean-Marc Matos










