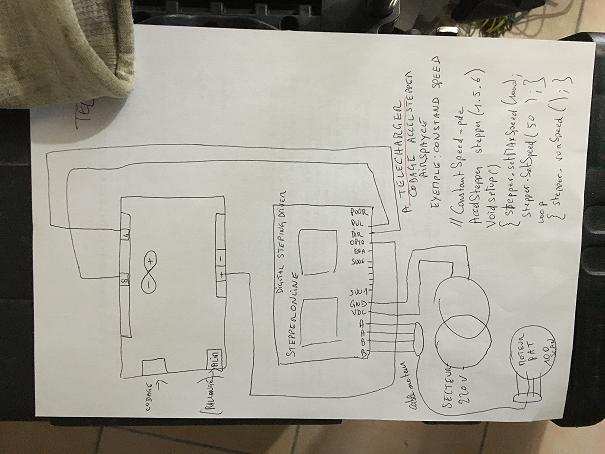
Bonjour, il y a quelques temps j'ai récupéré un spot professionnel pivotant dans tous les sens . Mais après une chute beaucoup de pièce ont manquées . Il a été réparé avec une carte arduino et un driver stepperonline digital , des explications et un numéro de téléphone en dérangement .
Il n'as plus que un sens unique de marche , mais c'est pas grave . Dans tous les cas ,mécaniquement il n’accepte plus que ça .
Il fonctionne avec constand speed de chez accel stepper . Une petite merveille .
Depuis , pour une question d'usure latérale il a fallu que je retourne le moteur sans penser que le sens de rotation serai plus bon . 
Je cherche encore le moyen d'inverser son sens mais électriquement rien y fait . Connaissez vous le bon fil à inverser , non les bons fils ?
Bien sur j'ai pensé à modifier son code , mais c'est pas faute d'avoir chercher . Des signes moins de partout , ça marche pas non plus .
Le programme est celui de www.airspayce.com , accel stepper . Il s'appelle constand speed . Je vais modifier le câblage moteur du codage . J'ai un brouillon pour ça, et du temps en ce moment . Comme beaucoup je me confine .
Si quelqu'un connais un spécialiste accel stepper pour changer son sens ?
Merci pour votre lecture et si vous pouvez passer le mot .
cook

 ou bien tu nous dit à quel étape tu bloques / quel est ton problème ( avec des photo ou autre )
ou bien tu nous dit à quel étape tu bloques / quel est ton problème ( avec des photo ou autre )