


Bonjour à tous ,
en quelques lignes, je vais essayé de vous présenter au mieux mon projet .
Ça fait quelques semaines que je me suis plongé dans l'arduino et mon projet serait de faire fonctionner un guide linéaire motorisé avec un moteur pas à pas nema 17 .
"Photo jointe " 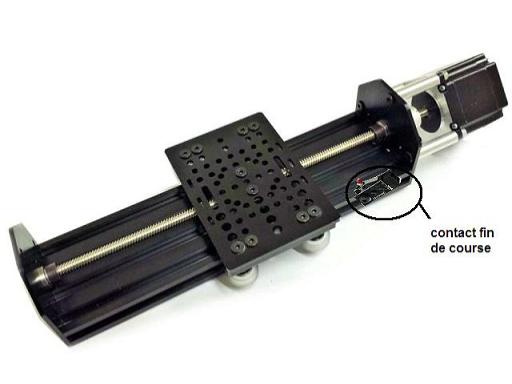
Ce guide ou " rail " linéaire est équipé d'un plateau coulissant qui se déplace de gauche à droite avec une butée électrique sur une de ses extrémités .
L'idée étant de le faire fonctionner avec du matériel connu et très utilisé sur les vidéos en ligne . Comme un écran LCD , quelques boutons poussoirs , une carte uno ,Un pilote TB 6600 .
Dans l'idéal et si nécessaire avec les librairie Accel stepper , one button , liquid cristal .
Le mode de fonctionnement , est celui ci :
En premier ,comme ce rail est équipé d'un contact de fin de course je souhaiterai avec un bouton poussoir, le diriger vers cette butée réglé à 30,0 cm du bord . En résumé , j’appuie , ,le plateau se déplace et il s’arrête à 30,0 cm du bord . L'écran affiche 30 cm .
En second , je souhaiterai afficher sur l'écran avec l'aide d'un bouton poussoir la distance de déplacement situé en 30,0 et 190 cm . Les millimètres sont important .
Pour résumer , je reste appuyé, le menu se déroule sans s’arrêter . Si je fait un appuis il incrémente le compteur au millimètre par millimètre .
En troisième appuyer sur un autre bouton poussoir pour effectuer le déplacement du moteur à la distance noté sur l'écran soit de 30,0 à 190,0 cm possible .
En quatrième , rajouter deux boutons ,soit un pour faire avancé le plateau de 5 mm par appuis et l'autre pour le faire reculer de 5 mm . La mesure sur l’écran affichera 5 mm de plus ou de moins .
Puis retour à l’étape 1 .
Voila , j'en suis là !
Bien sur , depuis je lis , je visionne , je teste . Je code , j'allume des leds .
Mais ce n'ai pas suffisant . Je ne sais pas par quel bout le prendre. Par quoi il faut démarrer pour concrétiser ce code ?
Toute aide sera appréciable .
En vous remerciant .
cook.

 )
)


 Je profite du confinage pour avancer le code .
Je profite du confinage pour avancer le code . 











