Quelle galère de se déplacer sur un gazon dense avec un robot de cette dimension. J'aurais pu le prévoir quand je vois mon robot tondeur galérer parfois dans les virages serrés.
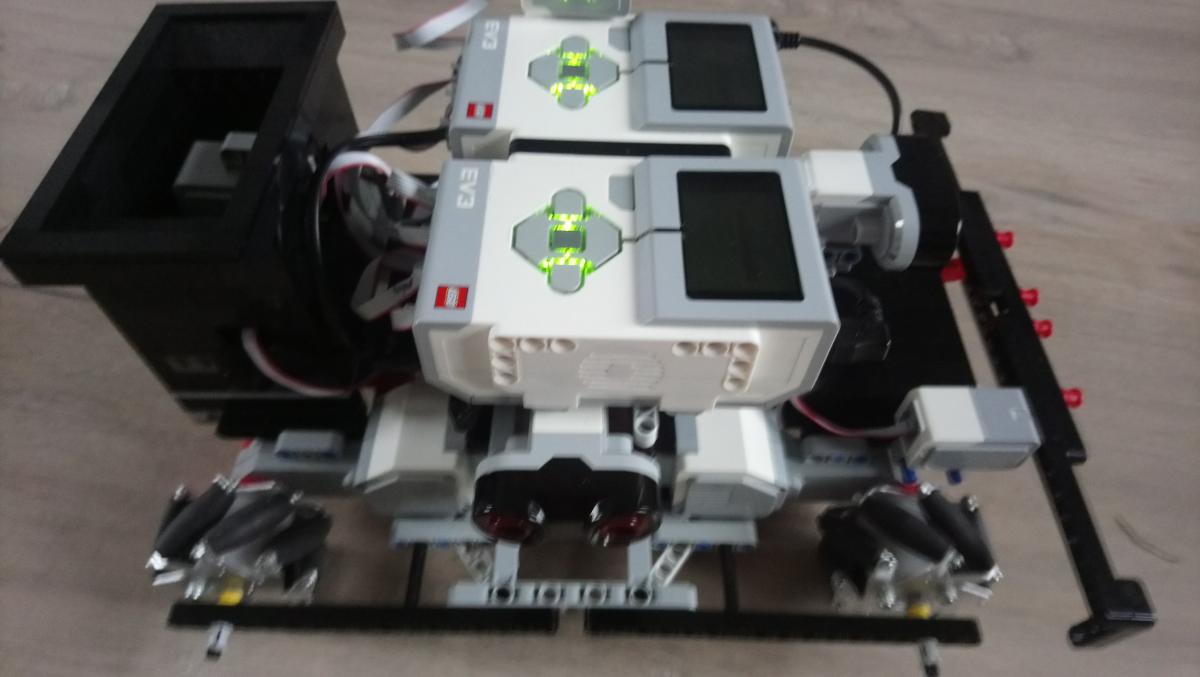
J'ai construit une deuxième base pour faire de multiples essais
* Une roue folle, devant, derrière, une boule à la place de la roue, ça ne marche pas, pas les caractéristiques de mon engin. Mon robot tondeur a une roue folle devant.
* Les chenilles, j'ai refait des essais, les virages serrés sont toujours douloureux, la seule solution est de tourner avec un grand rayon, mais ça ne me va pas. J'abandonne la chenille, la structure souffre trop et le robot semble se disloquer à chaque demi-tour
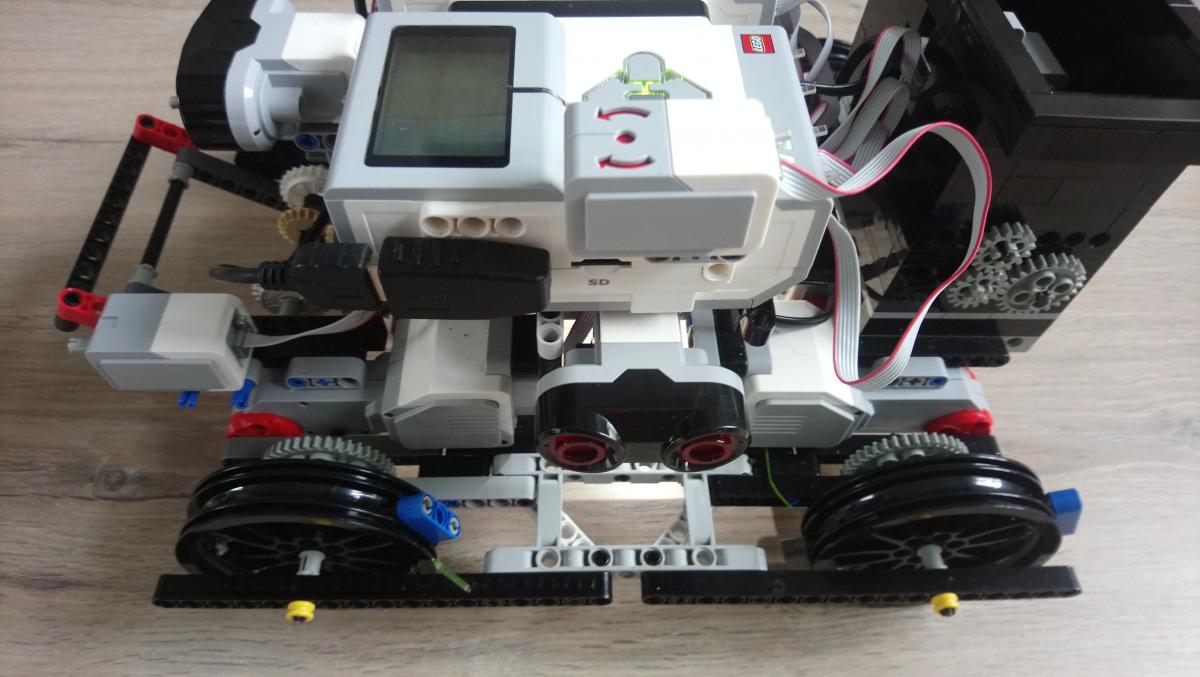
* J'ai fait un essai avec une roue à crampons, je voulais qu'elle soit lisse pour ne pas opposer de résistance dans les virages et des crampons pour avancer en ligne droite. La roue est originale, j'ai mis juste deux crampons par roue, c'est l'optimum d'après mes essais, au-delà ça ne tourne plus, mais la structure souffre aussi dans les virages. Dommage l'innovation ma plaisait, la ligne droite était de bonne qualité avec une forme de claudication amusante:
Non il faudrait inventer une roue qui puisse n'opposer que très peu de résistance dans toutes les directions...  genre roue mecanum...
genre roue mecanum...
Du coup j'ai mis des roues mecanum, elle sont un peu petites au niveau diamètre (60 mm) , ça jure un peu esthétiquement...mais ça marche nickel ! même une rotation complète sur lui-même le robot ne peine pas. Ces roues sont vraiment top, dans la plupart de mes constructions roulantes je finis avec elles...







 ben si...570 € et 2.4kg/roue !!!
ben si...570 € et 2.4kg/roue !!!








