Cliquez moi.

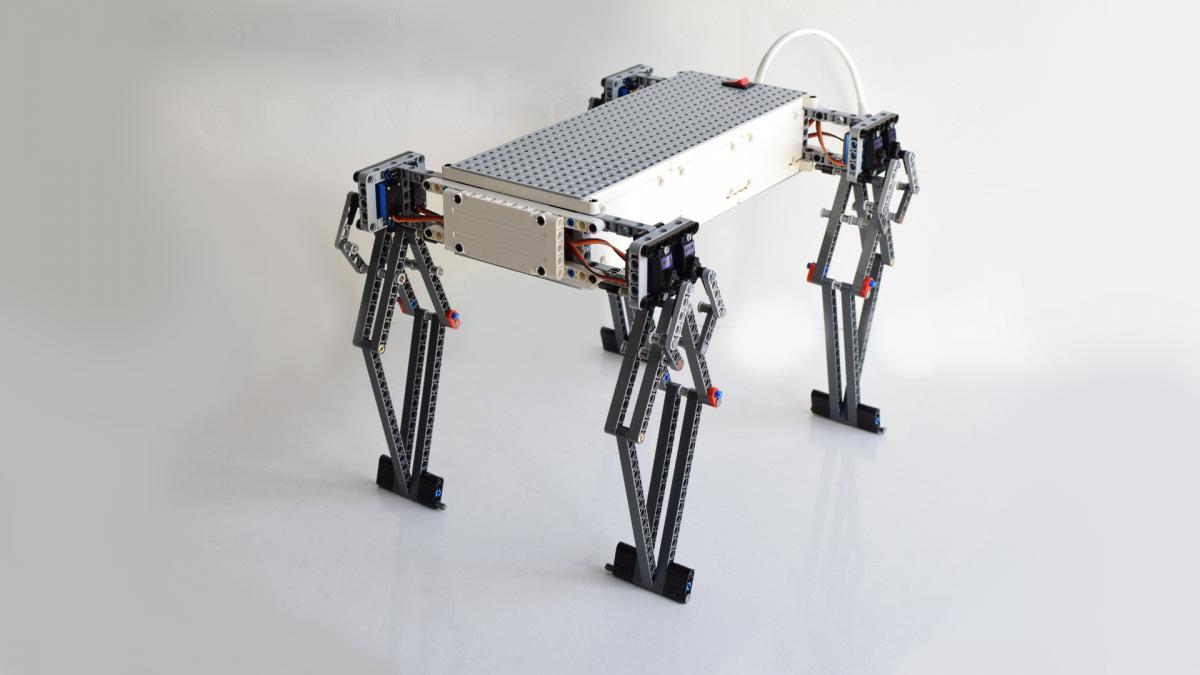
Je me décide à publier la deuxième version de mon quadrupède, FourBarQuad-2 (4BQ2).
Il est plus gros que la version précédente. La longueur du palonnier des servos passe de 32mm à 80mm, cela grace au servo MG92B qui a un couple de 3,5kg.cm en 6V, au lieu de 1,8kg.cm pour le SG90 (ouaaaai, il faut y croire très fort).
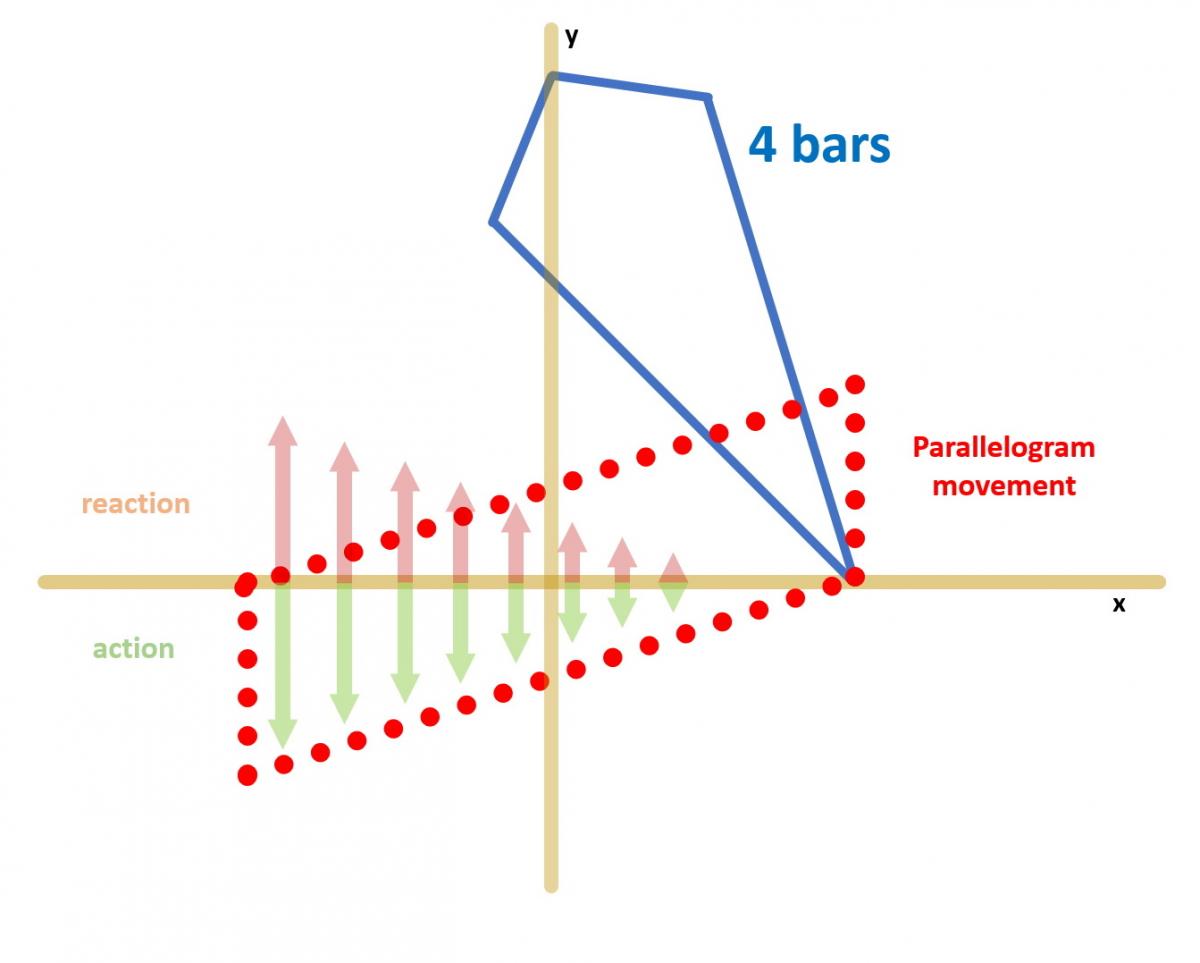
Avec le nouveau fémur (palonnier), j'espère que ce quadrupède va évoluer vers une cinématique plus convaincante . . .
Vous remarquez le nouveau montage des servos, plus sobre et plus efficace que le précédent.
La queue, c'est pour charger la batterie.
Caratéristiques :
- poids, 950g
- longueur, 33cm
- largeur, 27cm
- heuteur, 24cm
- Arduino Uno
- Shield Uno R3 V5.0
- 8 servos MG92B
- alim HENGE UBEC 5V - 6V - 7.4V - 12A (utilisée 6V)
- batterie 2S 3600mA
- boom stopper (fusible)