Oui, il y a des tests supplémentaires à faire. Je ne te promets pas de les faire tout de suite, mais je les ferai.
Faire les tests à la maison avec une vitesse supérieure, c'est très difficile. C'est pour cette raison que j'ai fait le rail.

Pilier du forum

Posté 21 décembre 2020 - 12:18
Oui, il y a des tests supplémentaires à faire. Je ne te promets pas de les faire tout de suite, mais je les ferai.
Faire les tests à la maison avec une vitesse supérieure, c'est très difficile. C'est pour cette raison que j'ai fait le rail.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Pilier du forum
Posté 02 janvier 2021 - 07:46
le fait que ça sautille plus, ça peut venir du fait que le pas est 10mm, mais aussi simplement du fait que ça ailles plus vite (petit test si tu veux vérifier : garde le pas à 10mm, mais mets PERIODE_US à 16000 µs : tu devrais aller à la même vitesse qu'avec le pas de 5mm à 8000µs, et tu pourra voir si ça sautille plus avec le pas de 10mm qu'avec celui de 5mm à vitesse égale).
La tempête a détruit le rail que j'avais installé sur ma terrasse et je n'ai pas le courage de le remonter.
Ce matin, j'ai donc fait les dernier tests que j'avais promis à Sandro, mais en intérieur.
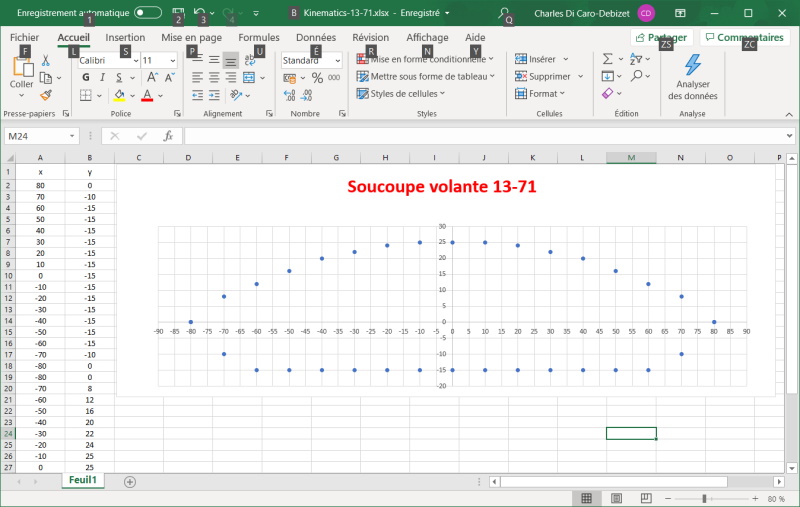
1 - premier test avec "soucoupe volante 13.71", pas de 10mm et PERIODE_US 16000.
Le Quad est très instable et la trajectoire est très difficile à garder. Distance parcourue 290cm/5s (là, je suis généreux).
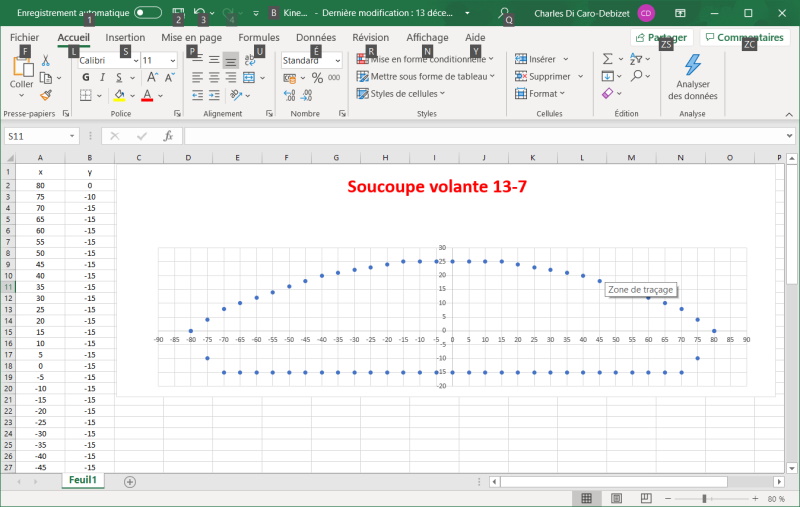
2 - deuxième test avec "soucoupe volante 13.70", pas de 5mm et PERIODE_US 8000.
L'allure est nettement plus souple et plus rapide. Distance parcourue 340cm/5s.
Il me semble donc que la conclusion que l'on peut tirer de ces 2 tests est que pour un mouvement identique, un petit pas et une PERIODE plus petite est préférable à un grand pas avec une PERIODE plus grande.
Je vais arrêter là les tests sur mon quadrupède et me consacrer entièrement à mon Biped, https://www.robot-maker.com/forum/topic/13343-mon-biped2021/ hormis la mise en œuvre d'un IMU qui me sera, de toute façon, utile dans les deux projets.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre chevronné

Posté 02 janvier 2021 - 10:19
Bonsoir,
du coup, ça confirme l'intérêt de commander le robot à une fréquence aussi élevée que possible pour une trajectoire fixe (meilleurs contrôle). Je pense que si on était à des fréquences plus élevées, la différence deviendrait très faible (mois d'erreur de suivit)
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.








0 members, 0 guests, 0 anonymous users

