J'abandonne cette version de mon projet.
L'idée de jambes flexibles peut paraitre intéressante, mais rapidement, je me suis rendu compte que c'était très difficile à mettre en oeuvre.
L'élasticité des tiges exerce une force permanente sur les servos qui chauffent énormément.
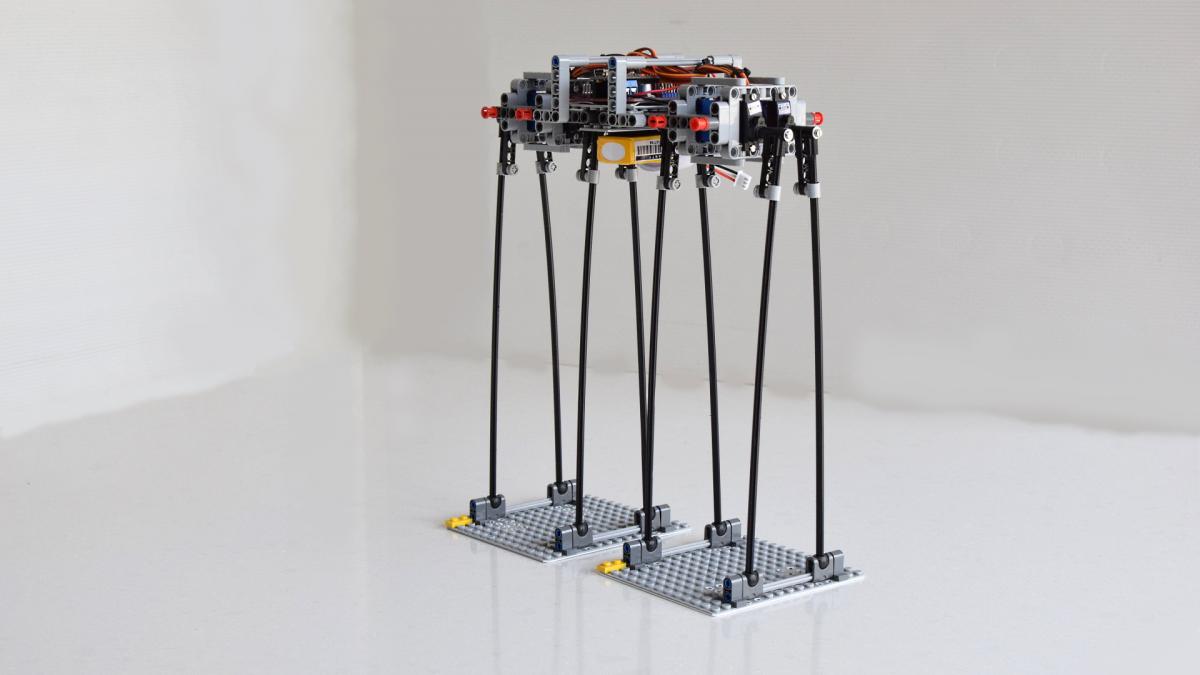
Ci-dessus, vous pouvez voir la dernière version. Je vais rebondir à partir de ce chassis, mais je remplacerai les tiges élastiques par des tiges articulées comme sur mes quadrupèdes.
Par ailleurs, je vais supprimer l'écart entre les jambes, de manière à faciliter le basculement gauche/droite avec un angle faible, comme les êtres humains.
Un écart important est possible, comme le canard, mais à condition que les pattes soient courtes et les pieds, très larges.
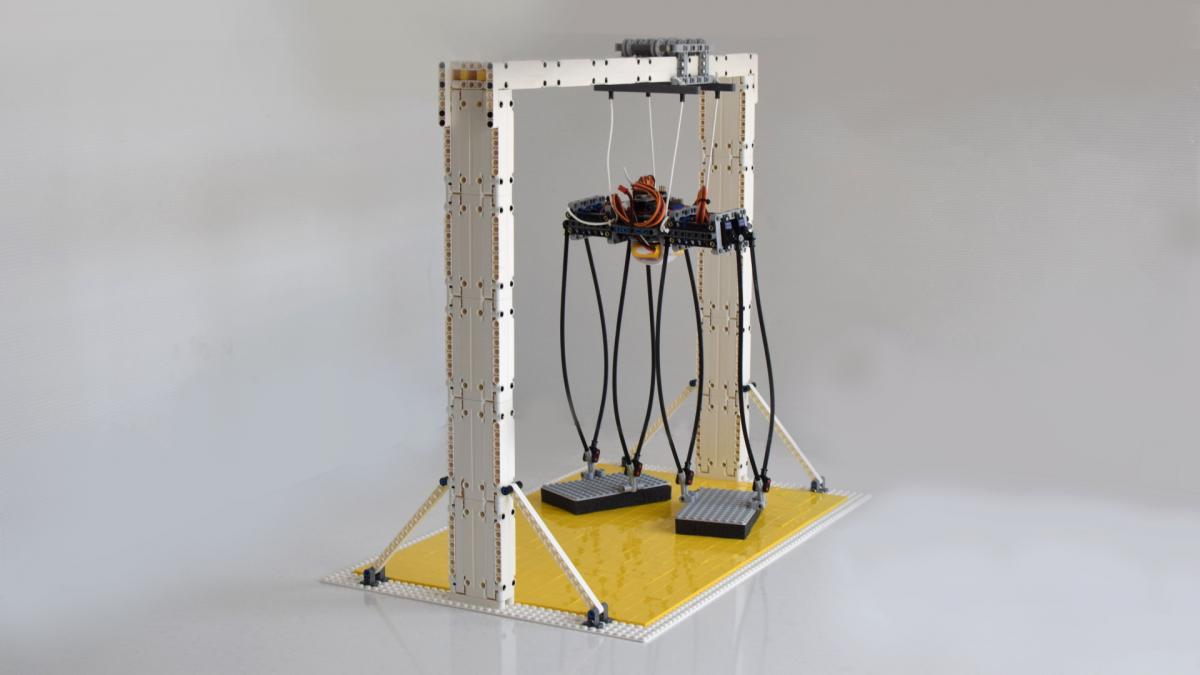
J'ai fait énormément de tests et j'ai beaucoup appris. Par exemple, le portique de tests qui m'a couté pas mal d'heure de travail, ne m'a été d'aucune utilité.
Le meilleur portique, en tout cas, le plus pratique, c'est la main . . .
Si on apprend beaucoup de ses erreurs, là, j'ai fait un grand bon en avant. 




 ( Je ne participe pas forcément souvent dans tes sujets mais je suis toujours et je lis tout
( Je ne participe pas forcément souvent dans tes sujets mais je suis toujours et je lis tout 













