Le plus intéressant, à mon avis, est de voir s'il supporte bien la chute.
Le saut c'est bien aussi, mais avec des réducteurs, il me semble que ce sera toujours limité.
La courroie est peut-être mieux adaptée à ce genre d'exercice.

Pilier du forum


Posté 10 février 2021 - 07:41
Le plus intéressant, à mon avis, est de voir s'il supporte bien la chute.
Le saut c'est bien aussi, mais avec des réducteurs, il me semble que ce sera toujours limité.
La courroie est peut-être mieux adaptée à ce genre d'exercice.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre passionné
Posté 10 février 2021 - 08:08
Oui, et ce n'est effectivement pas un but de pouvoir le faire sauter. J'ai commandé quelques engrenages Igus pour aller avec ce réducteur. C'est un test pour voir si ca vaut le cout par rapport à de simples engrenages en PLA ou ABS.
Habitué

Posté 11 février 2021 - 02:11
Tu commandes les engrenages Igus par quel site ?
Au passage, si vous connaissez un fournisseur de courroie crantée, ça m'intéresse. C'est assez galère.
"Il n'y a rien de plus étrange pour l'homme que son image" RUR, Karel Capek
Caliban Midi - Art - Terroir et Robotique
Membre passionné
Posté 11 février 2021 - 02:18
https://www.igus.eu/.../3d-print-gears
Voici les deux sites !
Très bonne expérience avec les deux.
Patrick.
Habitué
Posté 13 février 2021 - 09:56
Merci pour les liens ! On va tester ça. On a découvert aussi pour les courroies de précision.
https://www.binder-magnetic.com/
On est deux sur cette papatte. Mon collègue gère en mécanique et impression 3D. Les courroies sont maintenant bien équilibrées et ne glissent plus. Hier on a commencé à intégrer tout ça et faire les premiers tests sur la base du suivi d'une trajectoire elliptique.
Et le code
"Il n'y a rien de plus étrange pour l'homme que son image" RUR, Karel Capek
Caliban Midi - Art - Terroir et Robotique
Membre passionné
Posté 13 février 2021 - 10:21
Ca fait plaisir de voir que ca avance ! La mécanique a l'air au point dans ces premiers essais. La partie tibia/pied (PLA?) tient le choc ?
Tu saurais dire quelle est la consommation moyenne et la tension des moteurs pendant tes tests ?
Pilier du forum
Posté 13 février 2021 - 02:02
Bravo Thot !
Pour ce genre de test, ne serait-il pas plus réaliste de charger la patte, en haut, avec 1/4 du poids du châssis du quadrupède ?
Si tu veux des commentaires sur ta vidéo, tu ne devrais pas la réserver aux Kids.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre passionné
Posté 13 février 2021 - 02:18
D'ailleurs, ca pèse combien un quadrupède avec de ce type de patte ! 3kg ?
Thot, tes jambes sont en 2 ou 3-DOF dans ton projet final ?
Pilier du forum
Posté 13 février 2021 - 07:23
A la réflexion, je pense qu'il faut considérer 1/4 du poids du châssis et le poids d'une patte.
Parce que la patte doit se déplacer, elle même.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Habitué
Posté 13 février 2021 - 09:31
Oui, ça avance à un rythme pas très soutenu mais ça avance :-)
On va faire des tests sur la consommation, voir les pics de courant et mesurer les températures. Pour l'instant, sans charge, on limite à 10A le courant des phases avec une tension d'entrée de 15V.
Pour l'instant, on a un MAD 5005 300KV qui entraine l'articulation du genou et un 5008 240KV pour la cuisse. On a reçu les moteurs dans cet ordre... Mais on va inverser.
Le MAD 5005 accepte temporairement 15A et le 5008 accepte temporairement 28A. On est donc presque à 1/3 des possibilités.
Quand la patte, sans charge est à 95% de son extension totale, le courant de phases du moteur du genou ne dépasse pas les 1A.
Ainsi, il faut différencier une charge statique qu'on essaiera de prendre avec les pattes suffisamment tendues pour éviter de trop fatiguer, et une charge dynamique qui correspond au nombre de g que prendra une patte lors de différentes allures.
Nous allons faire les tests de charge, mais on est tout de même assez confiants.
La patte est imprimées en PETG, c'est très solide, on a moins de déformation qu'avec le PLA et on sent vraiment une meilleure robustesse.
Pour le bout de la patte, c'est un test très concluant d'une moulage silicone dans un moule imprimé en PLA. Le silicone, en se déformant, adhère super bien au sol.
Une chose intéressante que l'on a noté c'est une compensation inclue dans le contrôleur. A cause des pôles magnétiques du moteur, cela ressemble à un moteur pas-à-pas, on a des sortes de "crans" qui empêchent de tourner de manière fluide, surtout quand le moteur est accouplé à une charge qui a des frottements. C'est ce qu'on appelle le "cogging". Pour éviter ça, le contrôleur Tinymovr permet de placer un gain intégral sur le contrôle de vitesse. Cela permet d'être plus précis sur le contrôle de vitesse sans charge, et donc plus fluide. Quand on force sur le moteur de manière continue, il y a une phénomène qui implique un gonflement de ce gain, mais dans le sens opposé au mouvement.
Ainsi, quand on fait une manœuvre de "pompes", au bout d'un certain temps, le robot n'y arrive plus. Si on annule ce gain intégral, le phénomène disparait et le robot peut continuer à faire des pompes tant qu'il y aura une centrale nucléaire de l'autre côté.
Techniquement parlant, c'est dommage mais artistiquement parlant c'est puissant. On a vraiment l'impression qu'il en peut plus. Pour un personnage, ce genre de comportement est super.
"Il n'y a rien de plus étrange pour l'homme que son image" RUR, Karel Capek
Caliban Midi - Art - Terroir et Robotique
Membre passionné
Posté 13 février 2021 - 11:51
Tout ca est très intéressant !
Quel produit silicone utilises-tu ? Mieux que du TPU imprimé ?
Est-ce que tu vas opter pour une tension d'alimentation plus élevée en fonctionnement ? Avec le 5008, je comptais sur une alimentation 24V avec une batterie Lipo 6S à bord.
C'est curieux ce phénomène lié à l'intégral !
De mon coté, j'avance sur la conception du quadrupède tout entier, mettant en œuvre mes modules à deux moteurs.

(longueur 500, voie 260, empattement 380, fémur 100, tibia 180mm)
Je suis un peu inquiet sur le poids total du robot. Je l'estime à 3.5 .. 4kg en ordre de marche. Les moteurs ont l'air puissant, ca devrait aller, mais ca reste lourd.
Patrick.
Pilier du forum
Posté 14 février 2021 - 08:38
Je suis un peu inquiet sur le poids total du robot. Je l'estime à 3.5 .. 4kg en ordre de marche.
Je pense qu'il faut dès maintenant, déterminer quelle batterie va être nécessaire.
Indépendamment des moteurs, c'est la batterie qui va déterminer le poids.
Il me semble un peu long, https://www.robot-ma...attes/?p=112506
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre passionné
Posté 14 février 2021 - 12:20
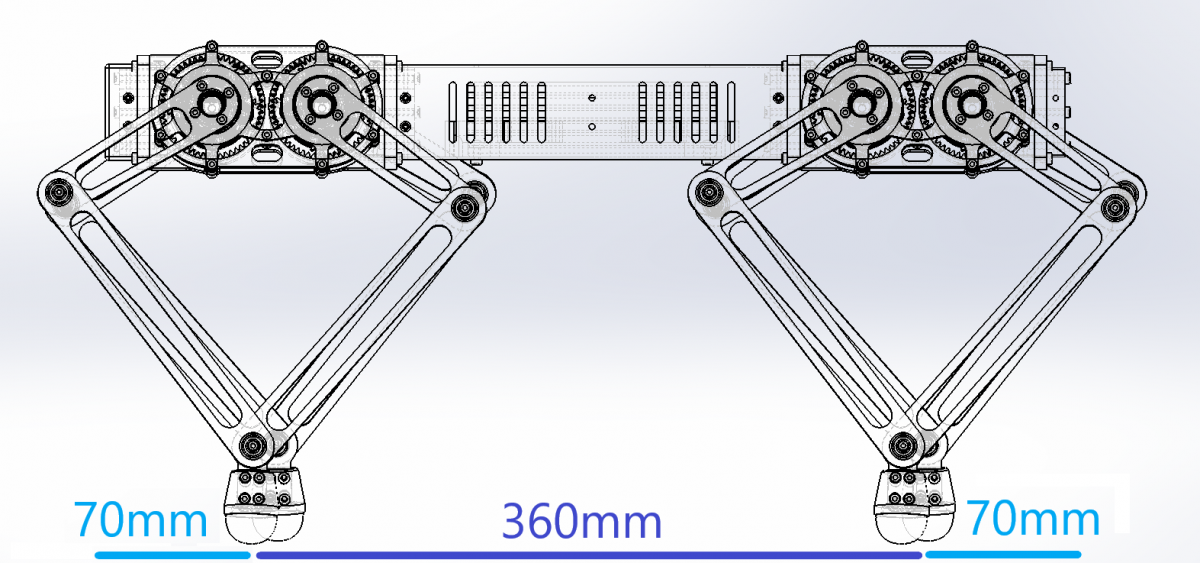
Apres recomptage, je suis plutôt à 290mm de large pour 360mm d'empattement.
La longueur totale du robot est égale à l'empattement ajouté de deux fois le diamètre du moteur. A l'avant, un moteur est en porte à faux par rapport à la position du pied au repos, et pareil à l'arrière.
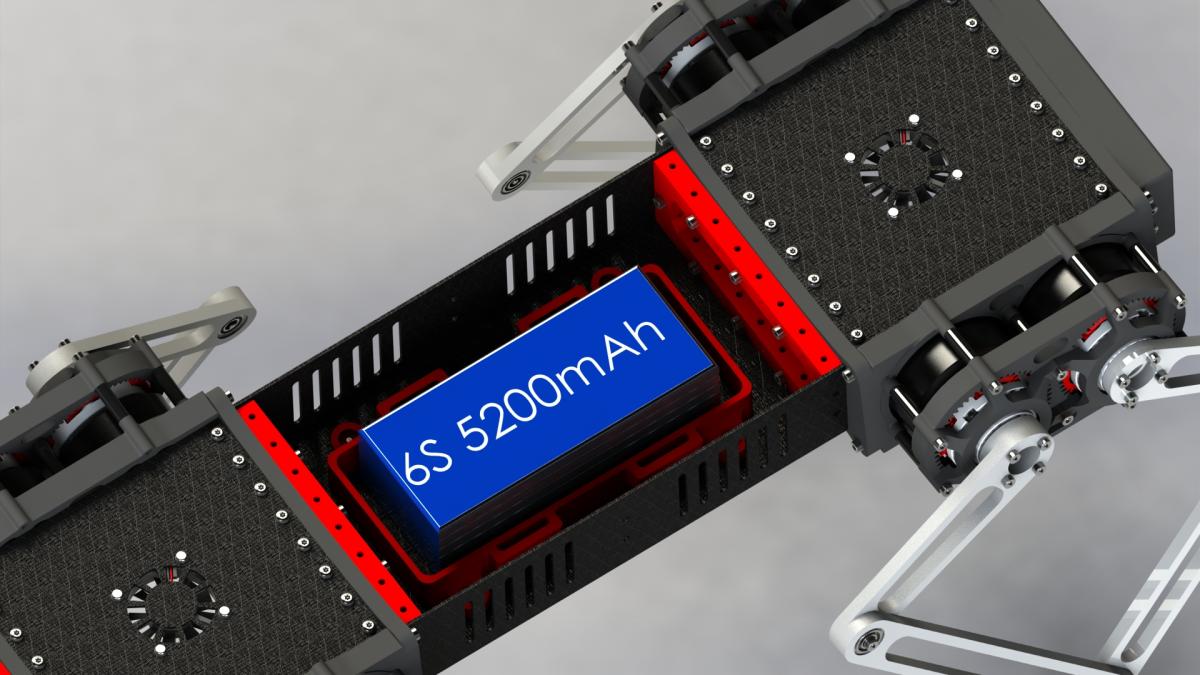
En effet, la batterie va représenter 10 à 20% du poids du robot, voire plus ! D'où la fourchette approximative jusqu'à 4kg. J'ai récupéré cette table sur une boutique en ligne :
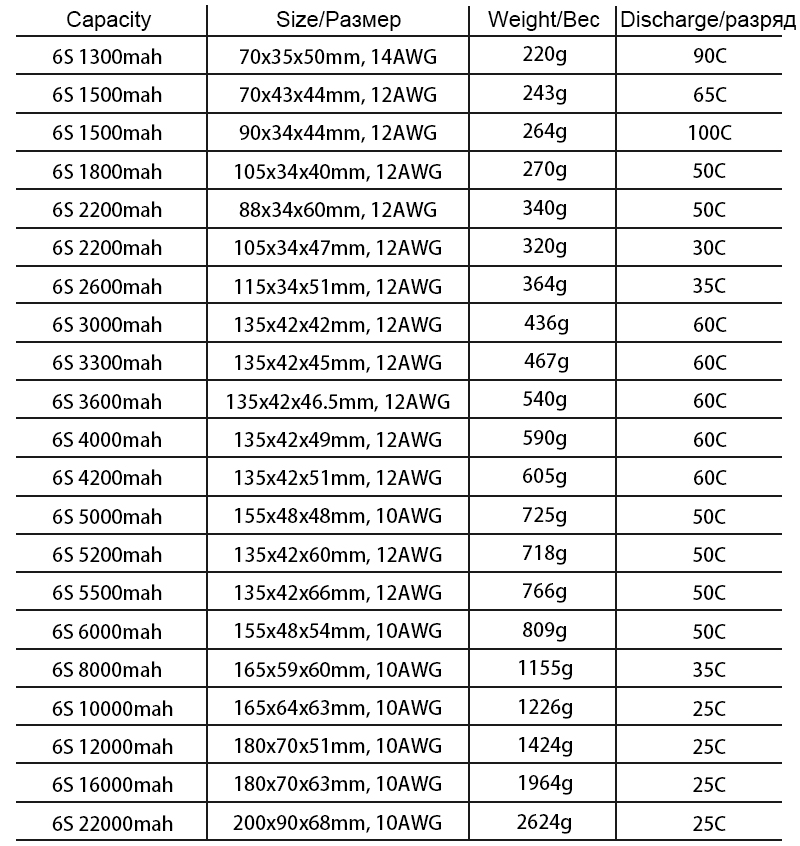
Pour un fonctionnement de quelques minutes (3 à 5 min) en complète autonomie, une batterie de l'ordre de 2500mAh pourrait suffire (compter ~370g).
Je calcule 2A sous 24V en moyenne par servo (x8). Il faudra un nombre de C suffisant pour faire face à la consommation pic des moteurs.
Pour des essais plus longs, il vaudra mieux un cordon et une bonne alimentation (30V 20A) !
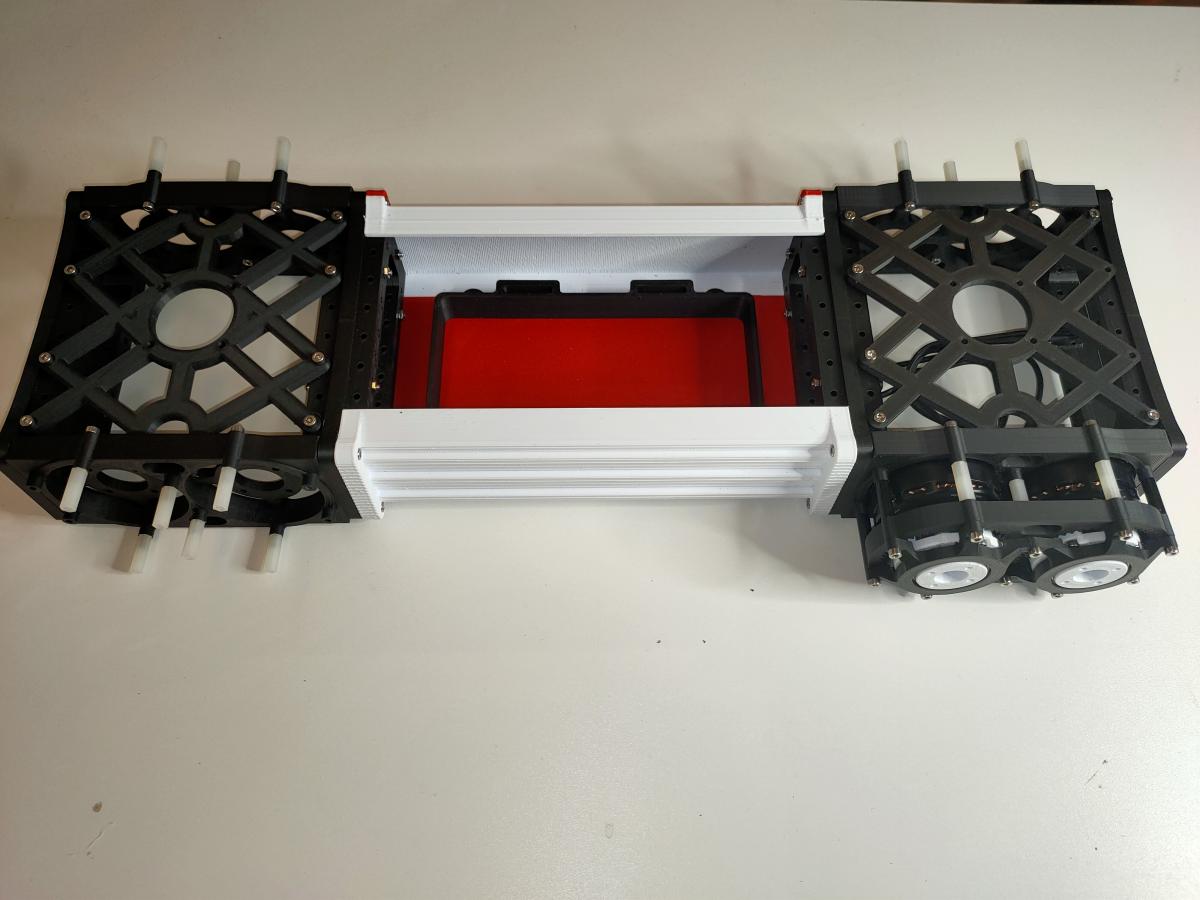
Je comptais installer la batterie à l'intérieur de la partie centrale du robot, dans un support imprimé, assez large pour pouvoir ajuster le centre de gravité et mettre de la mousse pour absorber les chocs. Elle sera tenue par des bandes de velcro, comme dans un buggy R/C. La partie centrale du robot serait une forme de baignoire en fibre de verre ou carbone, un 'U' de 10 x 5cm, sur 20cm de longueur (à ajuster pour avoir le bon ratio LxW), fermé par une trappe supérieure permettant d'accéder à la batterie. Il me faudra une ouverture rapide de la partie supérieure, au cas où !
Pour fabriquer ce 'U', je vais découper 3 plaques de fibre (épaisseur 1.5mm) et les coller à la résine époxy, et renforcer à l'intérieur, au niveau des angles, avec de la fibre (coupée/mèche/...). Le 'U' devra assurer une certaine rigidité entre les deux modules AV et AR, comprenant chacun quatre moteurs, deux pattes et toute l'électronique de contrôle : quatre ESC, un hub 6 ports CAN, une carte de distribution d'alimentation 24V, et certainement un petit ventilateur (40x40).
Voici une nouvelle ébauche.
Va falloir un peu de plastique pour fabriquer tout ca !!
A suivre.
Pilier du forum
Posté 14 février 2021 - 02:39
Apres recomptage, je suis plutôt à 290mm de large pour 360mm d'empattement.
360/290=1,9
Sur l'exemple, on est plutôt à 1,4 ou 1,5.
Faut tester. Heureusement, la partie centrale est spécifique.
Comme tu as de la place en largeur, il serait peut-être préférable de prendre une batterie plus carrée. Je pense que cela existe, pour les drones.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre passionné
Posté 14 février 2021 - 06:46
Ah oui, il faudrait que j'allonge un peu alors !
Pour la batterie, c'est peut etre moins cher de mettre en série, deux pack 3S 2200mAh, très courant en modélisme.
Pilier du forum
Posté 14 février 2021 - 07:39
Ah oui, il faudrait que j'allonge un peu alors !
Ah, oui, je me suis planté dans mon calcul. 360/290=1,25
L'idée pour les batteries, ce serait de se rapprocher d'un cube, comme sur un drone.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre passionné
Posté 18 février 2021 - 10:37
Bonjour,
Quelques nouvelles avant de partir en vacances !
L'assemblage mécanique du robot se passe bien. Le châssis et une première patte sont complètement assemblés.

Juste quelques difficultés à imprimer les plus grandes pièces du châssis. La projection à 4kg tend à se confirmer.
Je viens de recevoir les engrenages imprimées par Igus en I3PL.


Au toucher, cela donne une impression de très grande robustesse. L'état surface semble poudré, et c'est cohérent du procédé de fabrication (SLS).
Une fois l'assemblage mécanique terminé, je passe au câblage ....
A suivre.
Pilier du forum
Posté 19 février 2021 - 07:04
Super , ça commence à prendre forme !
Bonnes vacances.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Habitué
Posté 19 février 2021 - 07:50

"Il n'y a rien de plus étrange pour l'homme que son image" RUR, Karel Capek
Caliban Midi - Art - Terroir et Robotique








0 members, 1 guests, 0 anonymous users




