Salut
Voila, l'année dernière, pendant le confinement, je me suis lancé dans le robot tondeuse homemade
j'ai récup les plans sur reprap windturbine (désolé je fais pas de pub mais juste pour donner les sources)
tout à bien marché mais cette fois la commande de puissance du moteur de coupe à lacher, donc il roule, mais ne coupe plus... pas pratique...
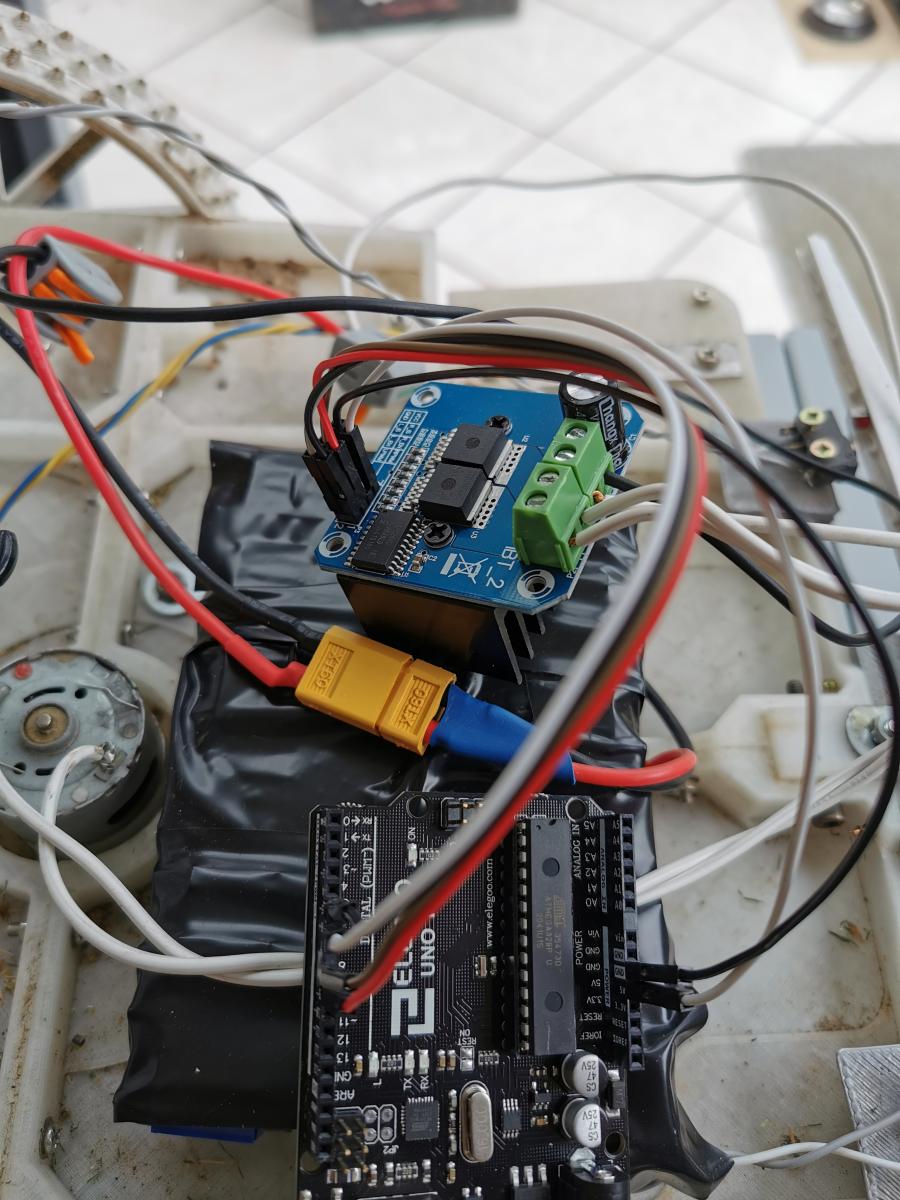
j'ai essayé de remplacer la partie puissance par un driver "tout prêt" un IBT2 qui est surdimensionné... mais impossible de le faire fonctionner, ou plutot, le seul truc que j'arrive à faire c'est du tout ou rien, alors que je souhaiterai réguler ma vitesse (j'ai un moteur 10000rpm)
le moteur est un SP3657-30
j'ai également essayé avec un L298N, mais il est bcp trop limite...il surchauffe très vite, mais la régulation fonctionne...
merci de vos conseils, j'aimerai trouver un driver "du commerce" pour m'affranchir de la partie électronique que je ne maitrise pas
merci




 ( Pas d'offense c"est comme ça qu'on apprend
( Pas d'offense c"est comme ça qu'on apprend