

Voici un rapide descriptif de mon Rover 4 roues motrices Vigibot Explorer@Fredj21

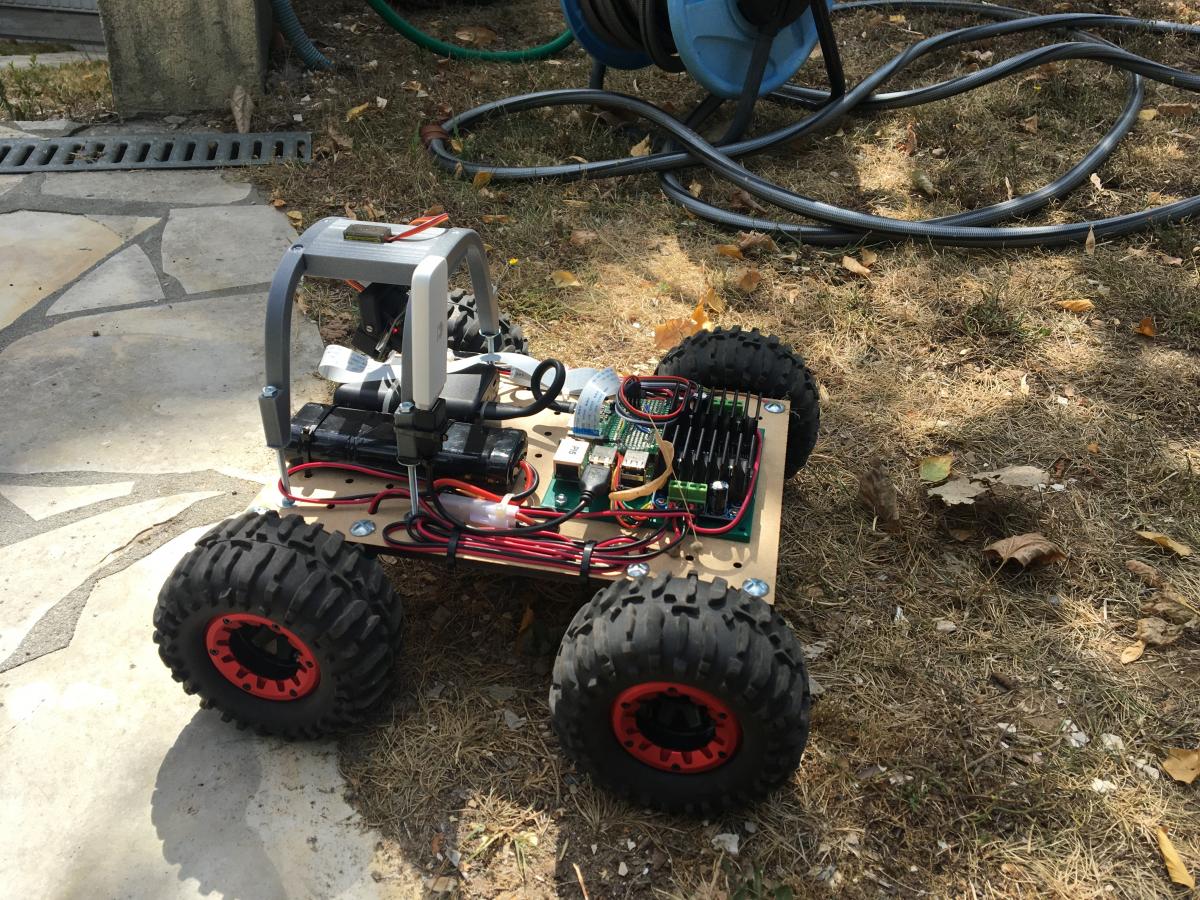
L’objectif principal était de réaliser un robot roulant très simple dans sa conception !
Le second objectif était de concevoir, tout de même, un véhicule robuste, d’une bonne taille, capable d’évoluer dans un terrain bien accidenté, et résistant aux maltraitances de jeunes pilotes Vigibot  …. un rover capable de survivre à une chute ou à des tonneaux !
…. un rover capable de survivre à une chute ou à des tonneaux !
La première version embarquait un ESP8266 , qui à été remplacé par un Raspberry PI pour l’intégration dans Vigibot.
Cette article se compose en plusieurs chapitres :
-
les pièces mécaniques
-
l'électronique et le câblage
-
la batterie
-
la configuration Vigibot
La mécanique
Le châssis est réalisé en découpe laser avec du médium de 6mm.
Il mesure 290x203 mm et est composé d’une matrice de trous de 4 mm espacés de 25 mm.
Cette matrice permet de positionner et fixer librement différents accessoires d’évolution.
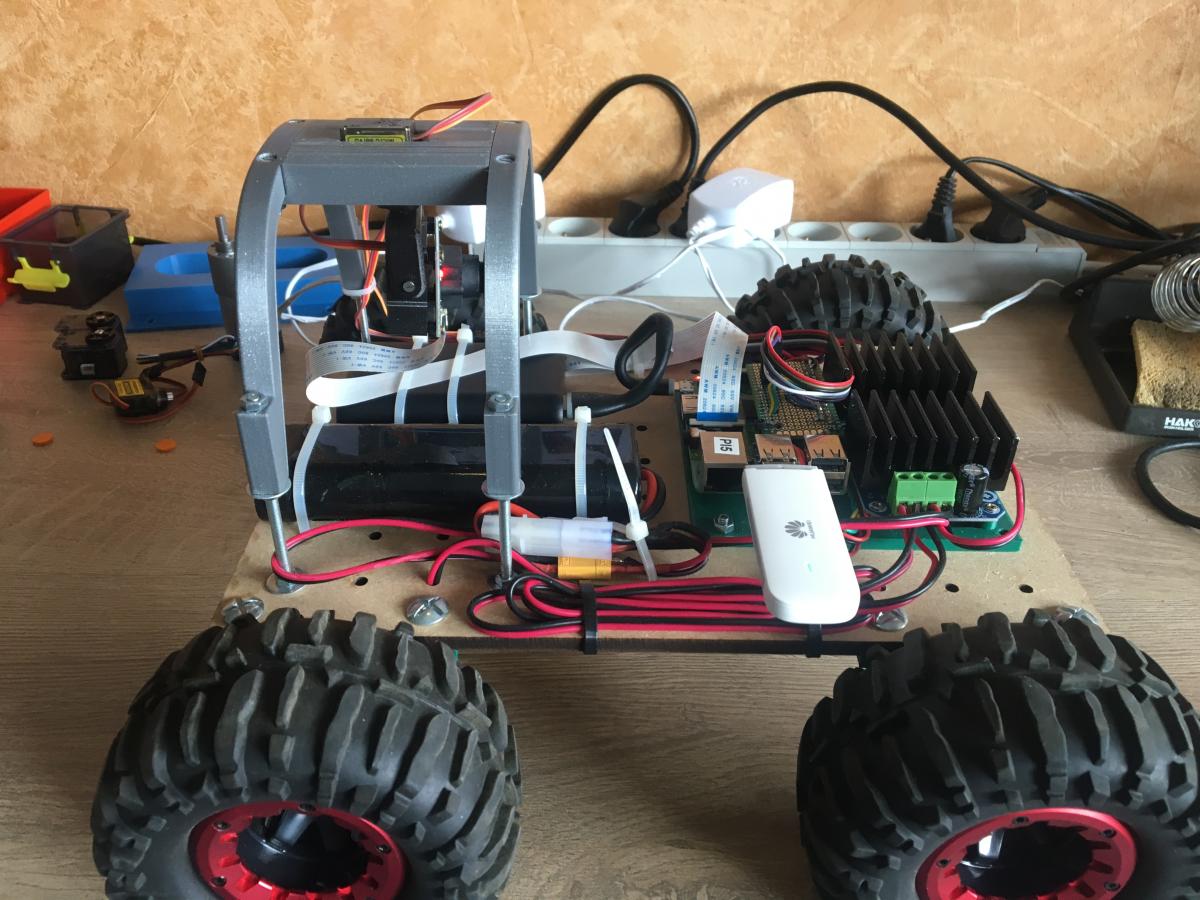
Les 4 supports moteurs sont réalisés en impression 3D, ainsi que le support de Raspberry et de batterie.
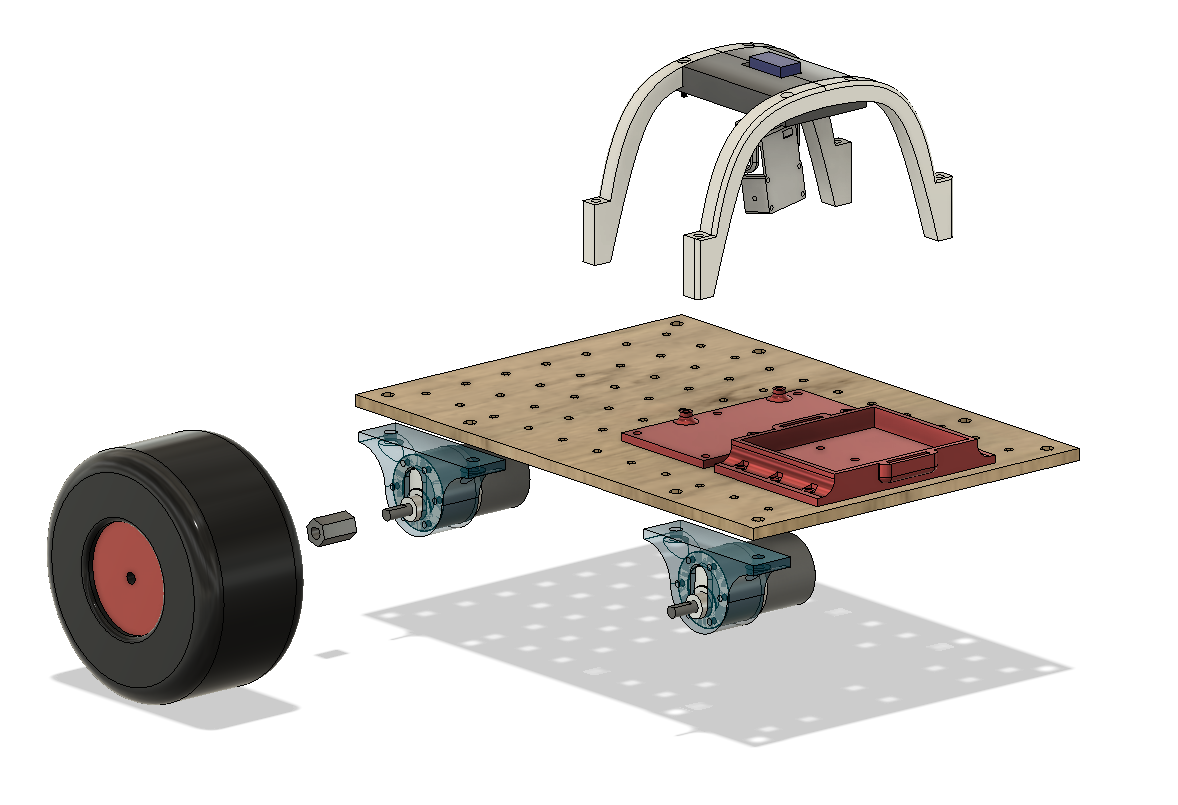
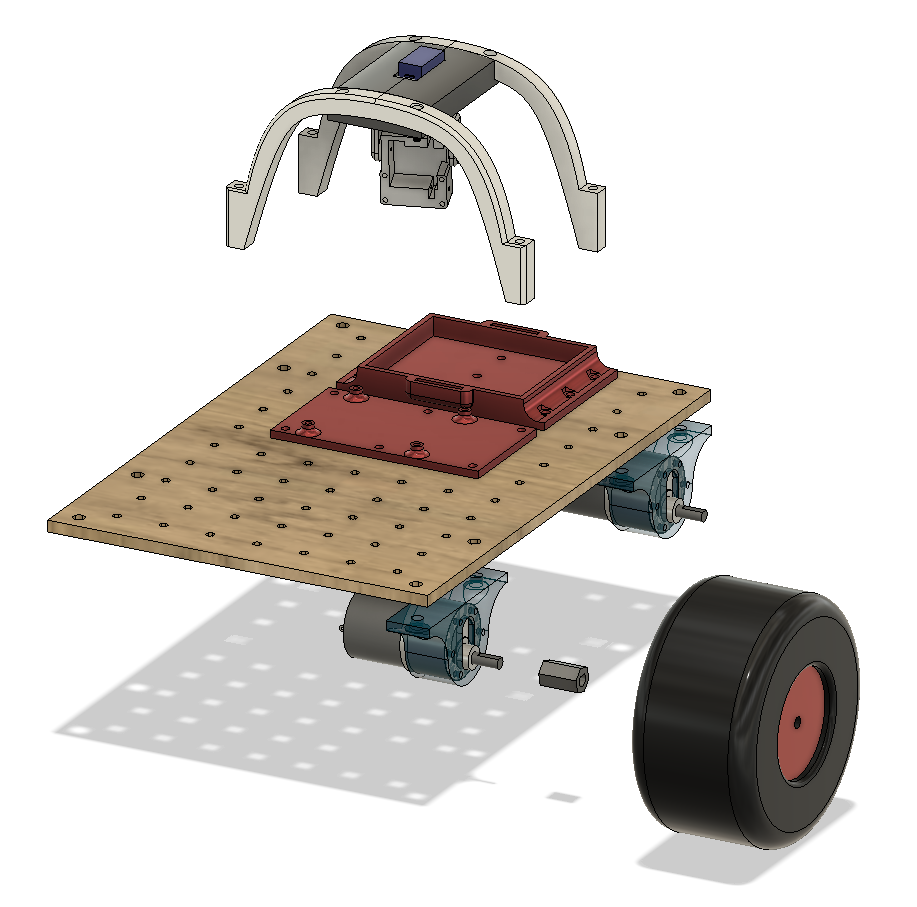
Un d’arceau (toujours réalisé en impression 3D) est fixé en hauteur par des tiges filetées d’environ 20 cm. Il permet de positionner en hauteur la caméra grand angle et son système motorisé , et ainsi d’obtenir une vue panoramique.
Quelques liens sur les composants utilisés:
-
Roues diam 120mm
https://fr.aliexpress.com/item/4000150449624.html?spm=a2g0s.9042311.0.0.27426c37iWbZol -
Moteurs D37 12v 100rpm 166oz-in (couple max de 12kg-cm)
https://www.robotshop.com/eu/fr/moteur-cc-a-brosses-12v-100-rpm-166-oz-in.html -
Servo moteur MG90s à engrenage métal
https://fr.aliexpress.com/item/32970918454.html?spm=a2g0s.9042311.0.0.27426c37F5oLZP -
Caméra Raspberry PI , grand angle
https://www.robot-maker.com/shop/capteurs/311-camera-raspberry-pi-311.htm
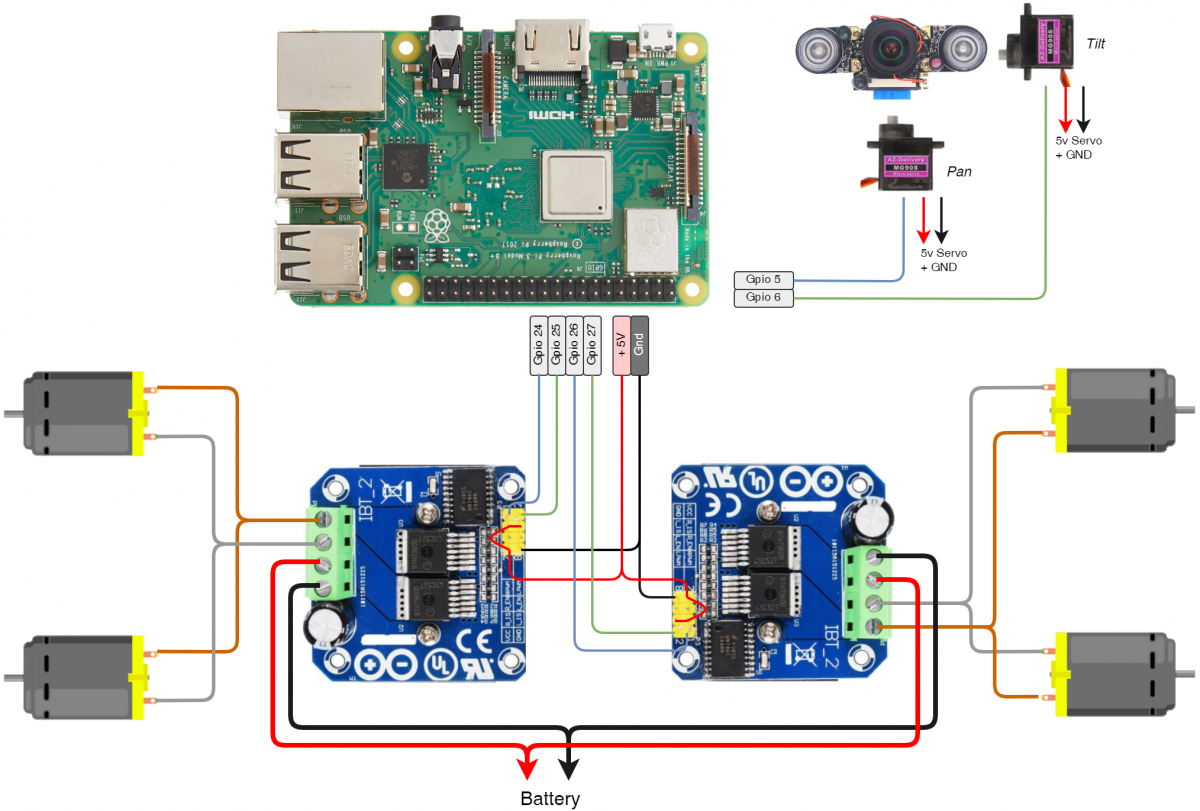
L’électronique
Rien de compliqué :
-
2 drivers moteurs de type Arduino IBT 2 sont raccordés au Raspberry PI afin de piloter les moteurs. Ce sont des ponts en H équipés de BTS7960 43A .
Ces drivers moteurs sont raccordés aux GPIO 24, 25, 26 et 27
-
Les servomoteurs de la caméra (pan/tilt) sont raccordés au GPIO 5 et 6
De plus, 2 périphériques USB sont raccordés directement sur le Raspberry PI :
-
un micro audio USB
https://fr.aliexpress.com/item/4000107089213.html - un dongle 4G
https://www.amazon.fr/Huawei-E3372-Dongle-Batterie-Secours/dp/B013UURTL4
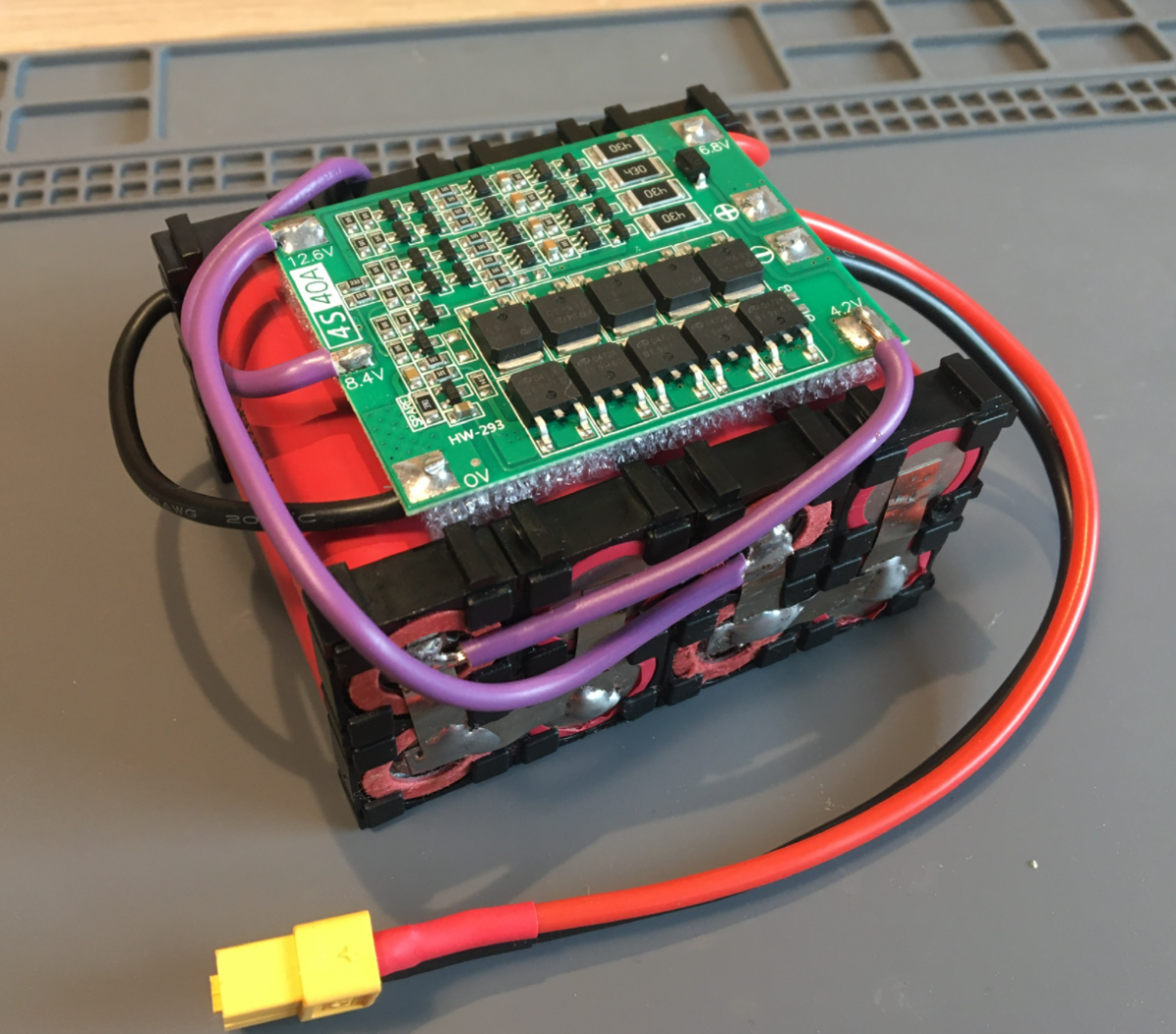
La batterie
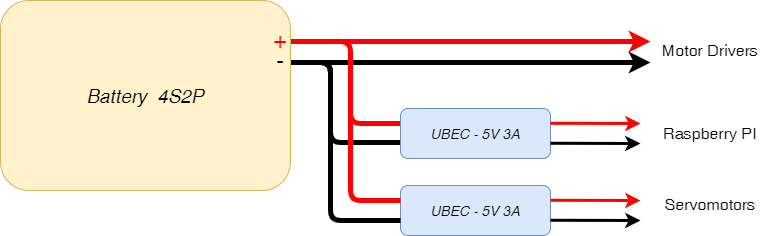
Une Batterie de type 4S2P (ou éventuellement 4S1P) fournit l’énergie électrique du robot.
Elle est donc composée de 8 (ou 4) modules 18650 et d’un BMS 60A.
Ce qui permet d’obtenir un tension de ~ 14,8 à 16,8 Volts et de légèrement sur alimenter les moteurs sans trop de risque.
Deux modules de type UBEC 3A permettent fournir deux lignes de 5v pour respectivement : le Raspberry et les servomoteurs
https://fr.aliexpres...3020848100.html
- rien (ou presque) à changer pour le pan/tilt de la caméra qui utilise les Gpio 5 & 6 , seul la rotation de l’image est modifiée :
"CAMERAS": [
{
"TYPE": "",
"SOURCE": 0,
"WIDTH": 640,
"HEIGHT": 480,
"FPS": 30,
"BITRATE": 1500000,
"ROTATE": 180,
"BRIGHTNESS": 50,
"CONTRAST": -5,
"BRIGHTNESSBOOST": 80,
"CONTRASTBOOST": 100
}
-
en revanche les moteurs utilisent 4 Gpio , il est donc nécessaire de modifier les Outputs 4 et 5 dans la configuration matérielle afin de spécifier le mode PwmPwm et d’indiquer les sorties utilisées
{
"OUTPUTS": [
{
"NAME": "Left wheels",
"TYPE": "PwmPwm",
"ADRESSE": -1,
"GPIOS": [ 24, 25],
"SLEEPMODES": [ "Floating", "Floating" ],
"INS": [ -100, -1, 1, 100 ],
"OUTS": [ -100, -1, 1, 100 ],
},
{
"NAME": "Right wheels",
"TYPE": "PwmPwm",
"ADRESSE": -1,
"GPIOS": [ 26, 27],
"SLEEPMODES": [ "Floating", "Floating" ],
"INS": [ -100, -1, 1, 100 ],
"OUTS": [ -100, -1, 1, 100 ],
...
Pour plus de détails sur cette configuration et pour ajuster en fonction de vos besoin n'hésitez pas à jeter un oeil sur comment configurer vigibot pour mes moteurs et autres actionneurs .
... et quelques Vidéos :
 voila pour ce rapide tour d'horizon ..... je rajouterai quelques informations un peu plus tard ....
voila pour ce rapide tour d'horizon ..... je rajouterai quelques informations un peu plus tard .... 










![[Guide] How to use DECTalk, the Moonbase Alpha Voice, on your robot - dernier message par firened](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-16821.jpg?_r=1639321316)





