
 Désolé. Aucune idée.
Désolé. Aucune idée.
Sinon, pourquoi des \r ?
Avec \r , tu reviens en début de ligne, puis avec /n , tu reviens en début de ligne, mais à la ligne suivante.

Pilier du forum


Posté 09 avril 2023 - 06:58
Désolé. Aucune idée.
Sinon, pourquoi des \r ?
Avec \r , tu reviens en début de ligne, puis avec /n , tu reviens en début de ligne, mais à la ligne suivante.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Habitué
Posté 09 avril 2023 - 09:19
Apparemment cela fonctionne mais il y a sûrement un code plus simple et efficace.
La fonction strtok mérite d'être connue 
String cm1;
String cm2;
void setup() {
Serial.begin(9600);
cm1 = "N2 U6 N2 A3 2 N2 U6 89 67 77"; // string reçue sur le port série
int cp = cm1.lastIndexOf('N2'); // position de N2 dans la chaîne en commençant par la fin
cp = cp - 1;
Serial.print("cp:");Serial.println(cp);
cm2 = cm1.substring(cp); // extraction de la chaîne retenue
int str_len = cm2.length() + 1;
char cm3[str_len];
cm2.toCharArray(cm3, str_len); // conversion du string vers CharArray
Serial.print("cm3:");Serial.println(cm3);
const char *delimiter =" "; // séparateur espace
char *token = strtok(cm3, delimiter);
while (token != NULL)
{
Serial.print("token:");Serial.println(token);
token=strtok(NULL, delimiter);
}
}
Ca donne dans le serial monitor :
N2 U6 N2 A3 2 N2 U6 89 67 77
cp:14
cm3:N2 U6 89 67 77
token:N2
token:U6
token:89
token:67
token:77
Habitué
Posté 19 avril 2023 - 07:56
Bonjour,
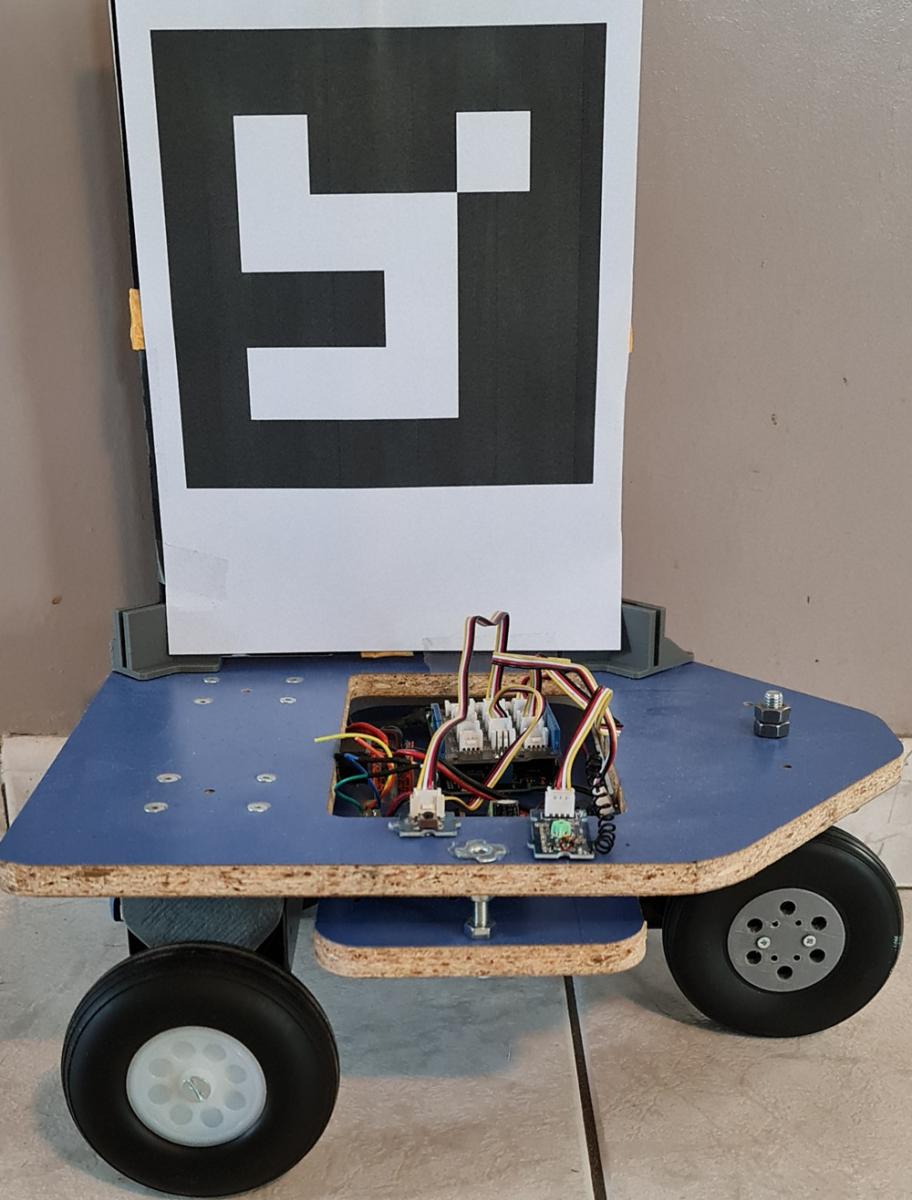
J'ai continué les essais avec la camera Jevois Pro
Le robot fait un va et vient entre 2 cibles ArUco qui se déplacent.
L'ArUco format A4 est détecté sans erreur à une distance de +/- 14 mètres. En plein soleil ou en faible luminosité.
Il n'y a aucun réglage à faire sur la camera. Juste démarrer Linux et choisir le bon module. Cette camera est géniale et les applications potentielles sont assez phénoménales. (merci à vous de m'avoir orienté vers ce matériel)
Le flux de données entre l'Arduino Mega est maintenant plus ou moins bien géré (selon mon niveau de compétence)
1) Rplidar 2) Encodeurs 3) Camera Jevois Pro 4) module Bluetooth qui reçoit et envoie données vers un smartphone qui est sur le robot. Le smartphone peut être lui-même contrôlé par un pc via Wifi.

Robot de guidage
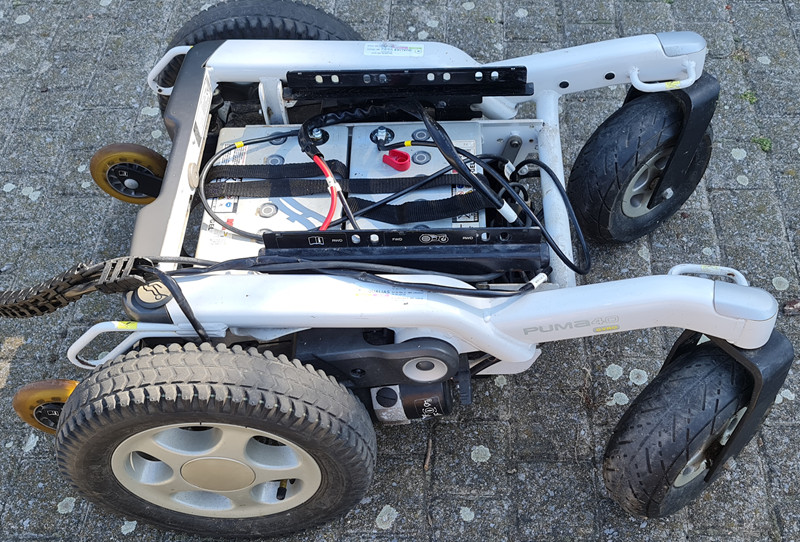
Etape suivante est de transposer le système sur un châssis plus costaud.









0 members, 1 guests, 0 anonymous users

