Dans ce post, https://www.robot-ma...-2023/?p=118265, j'étais très optimiste.
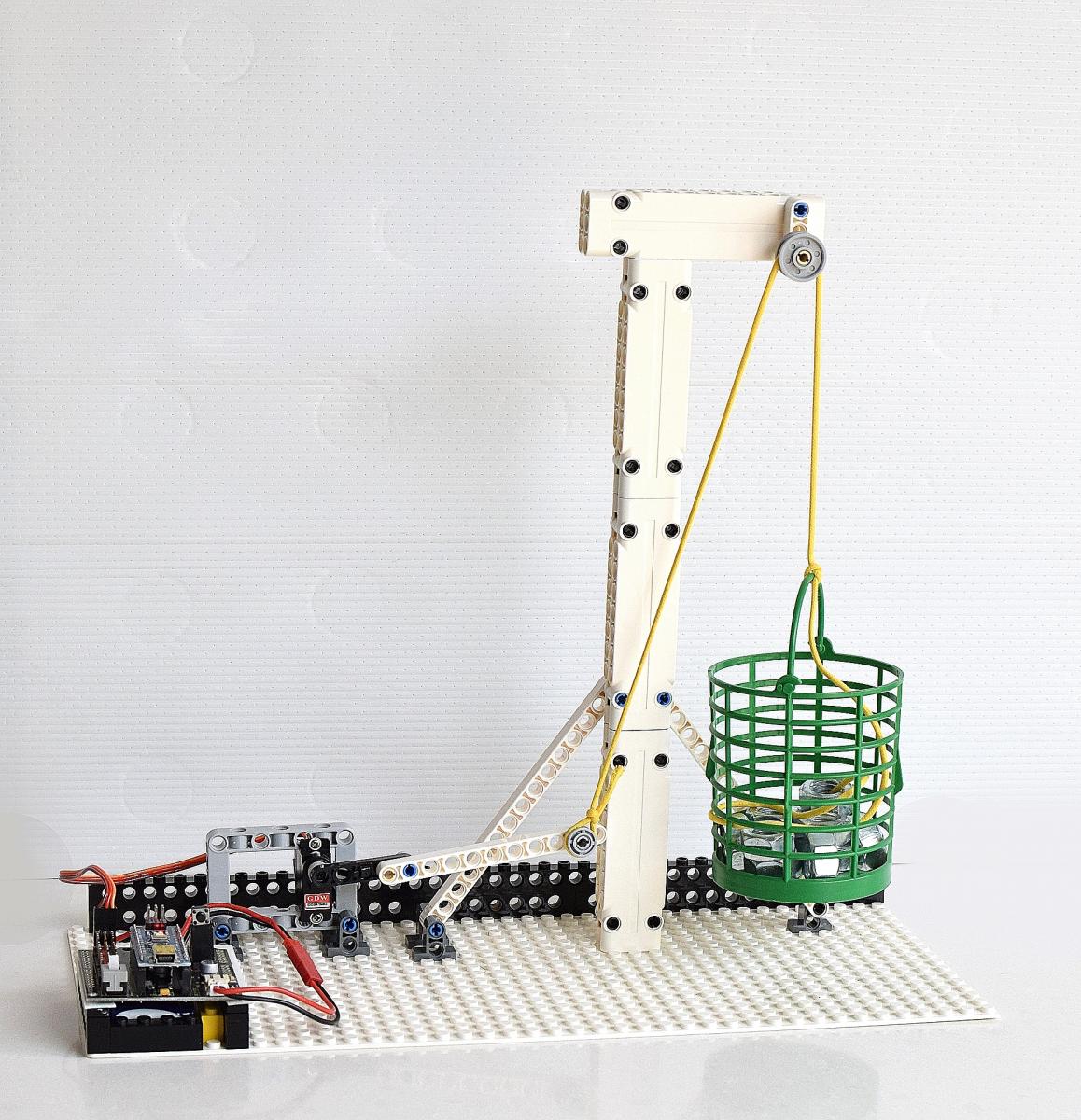
Malheureusement, j'ai été très déçu. Ce servo manque de couple.
C'est vraiment dommage, car avec son pignon en 25T standard il pouvait prétendre à être le servo à tout faire.
Je retourne donc au servo précédent, le GDW DS041MG, https://www.robot-ma...-2023/?p=118167, qui est excellent, mais qui malheureusement a un pignon non standard avec une vis au pas anglais et un câble trop court.
Comment est-ce possible ? Le couple indiqué n'est pas respecté ?

 .
.