Bonjour,
A douze jours de la TRR 2023, il est probable que ce nouveau quadrupède, commencé ce week-end, ne parvienne pas à dépasser le stade de la maquette, pour une démonstration statique en bord de piste au RoseLab ! 
L'histoire commence en début d'année avec la fabrication d'un remix du Pupper Stanford, à base de servo numériques Jx cls6336hv. Manque de bol, la majorité des servos reçus n'ont pas les performances attendues. En fait, il devient difficile de trouver ces servo et je ne connais pas d'équivalent fiables et rapides.
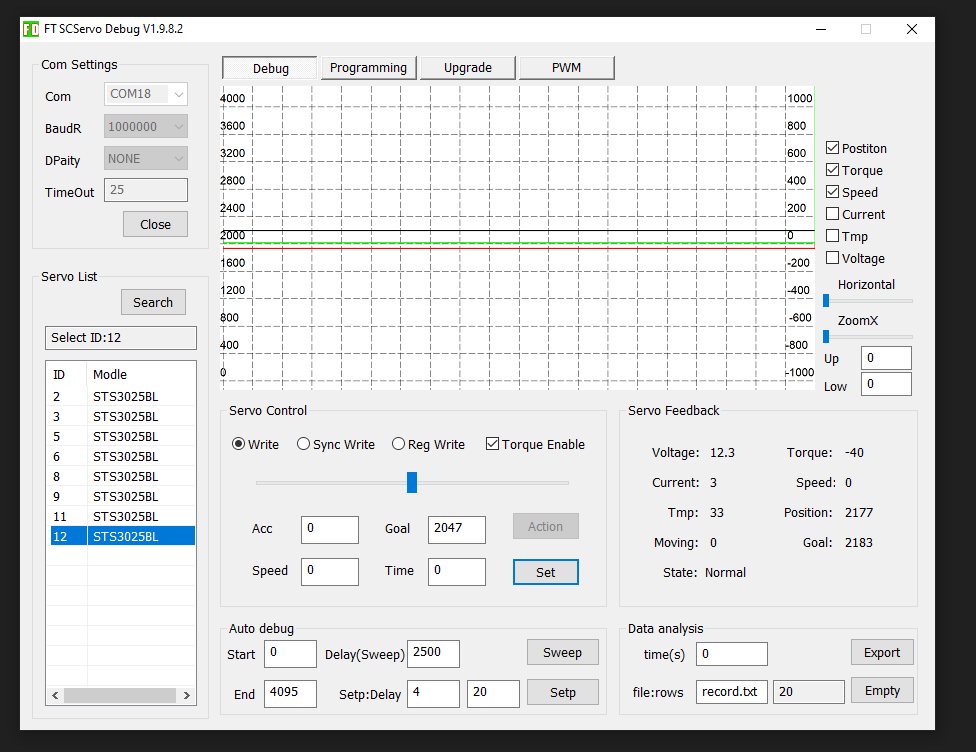
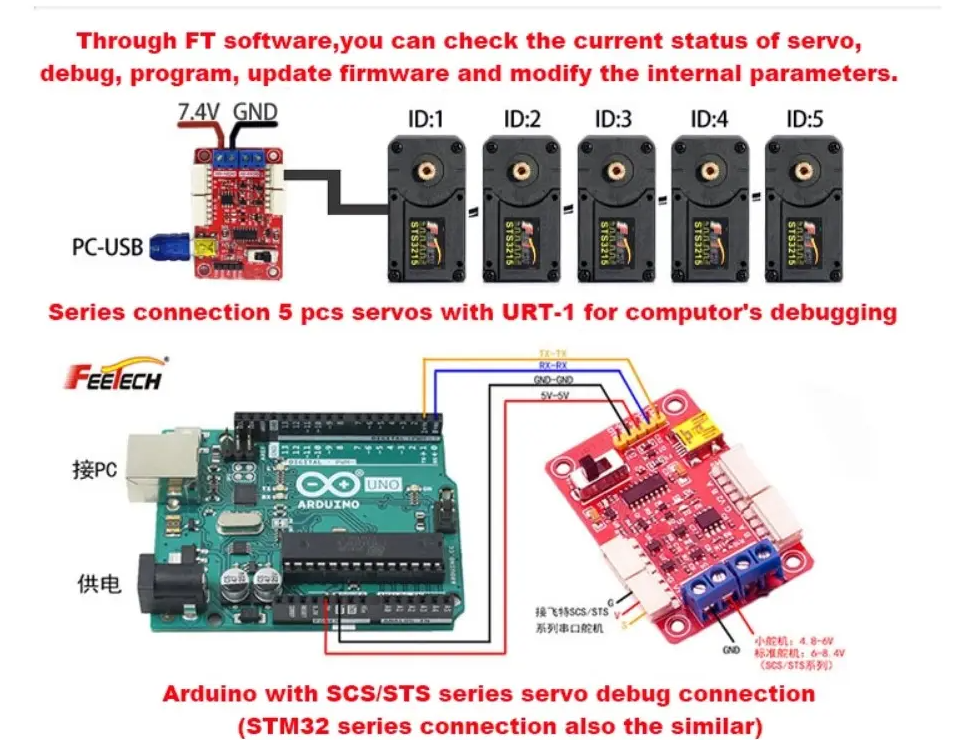
Apres un échange avec le support Feetech, je commande douze STS-3025BL-C002. Les derniers servos intelligents de la marque au format standard 40kg.cm : brushless, encodeur, 360°, 0.117sec/60°.
 (Re)Manque de bol (!!!), les servos n'ont pas les performances annoncées par Feetech. Mon test de performances : https://youtu.be/G61tw22lYiQ. Les servos Feetech manquent de couple et de vitesse. Pour une course, ca promet !
(Re)Manque de bol (!!!), les servos n'ont pas les performances annoncées par Feetech. Mon test de performances : https://youtu.be/G61tw22lYiQ. Les servos Feetech manquent de couple et de vitesse. Pour une course, ca promet !
Par conséquent, je laisse tomber le design à 12 DOF du Pupper Stanford. Je fais plus simple et je tente d'exploiter au mieux les servo intelligents Feetech.
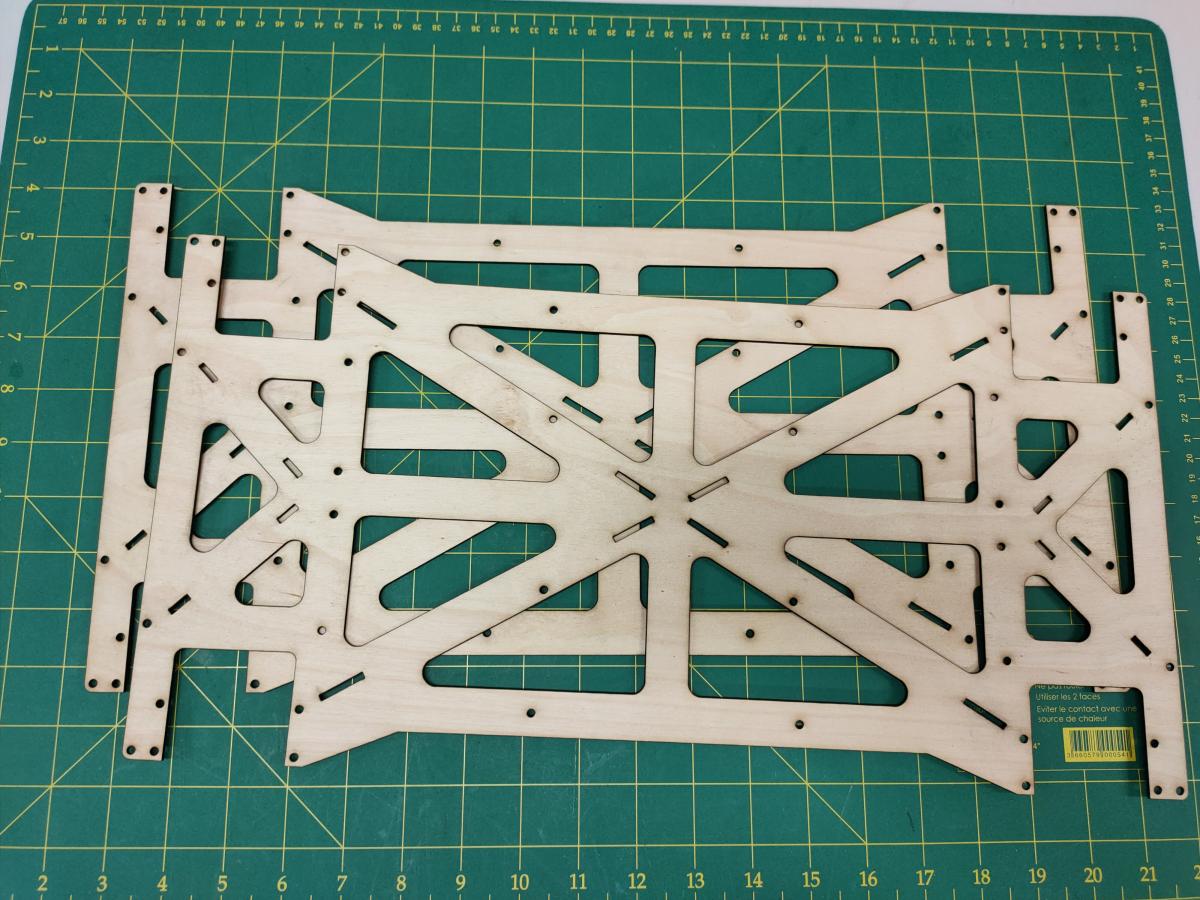
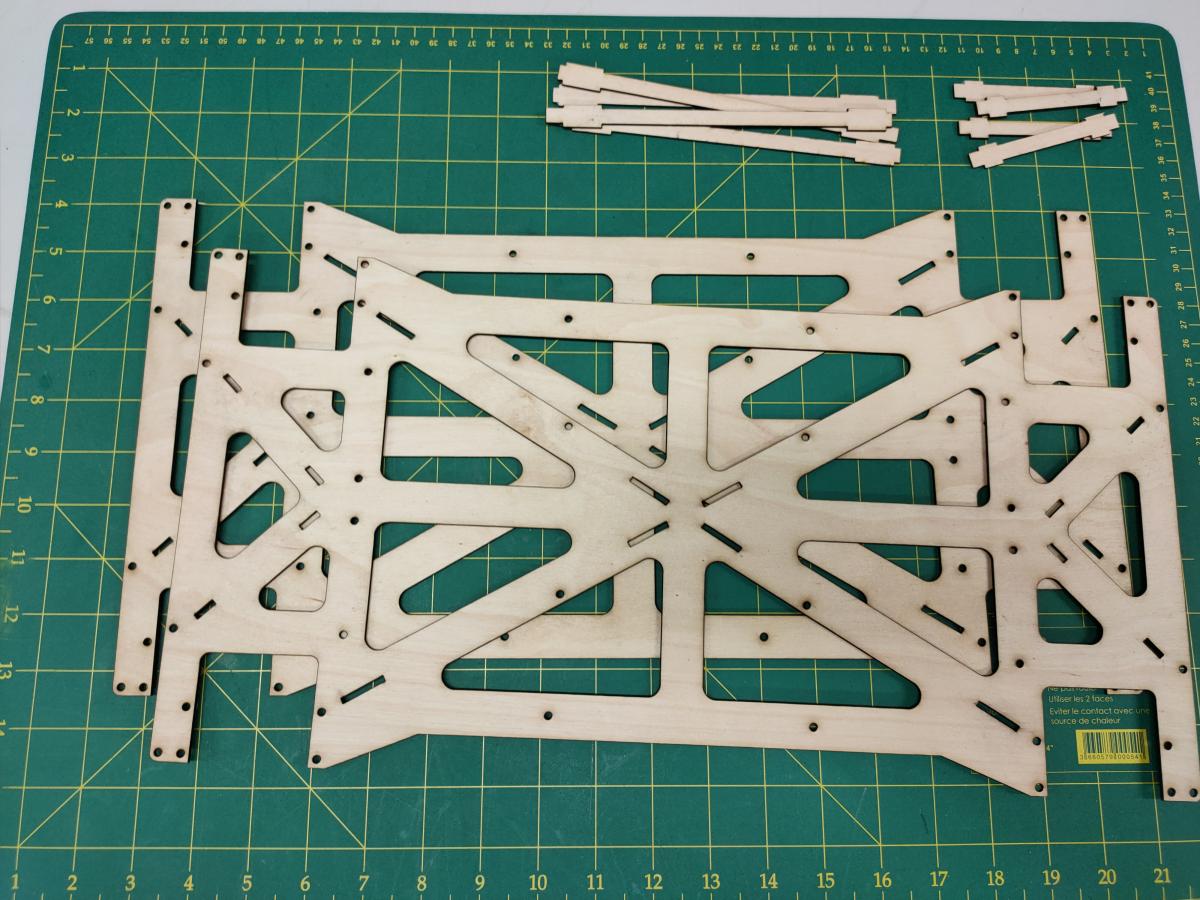
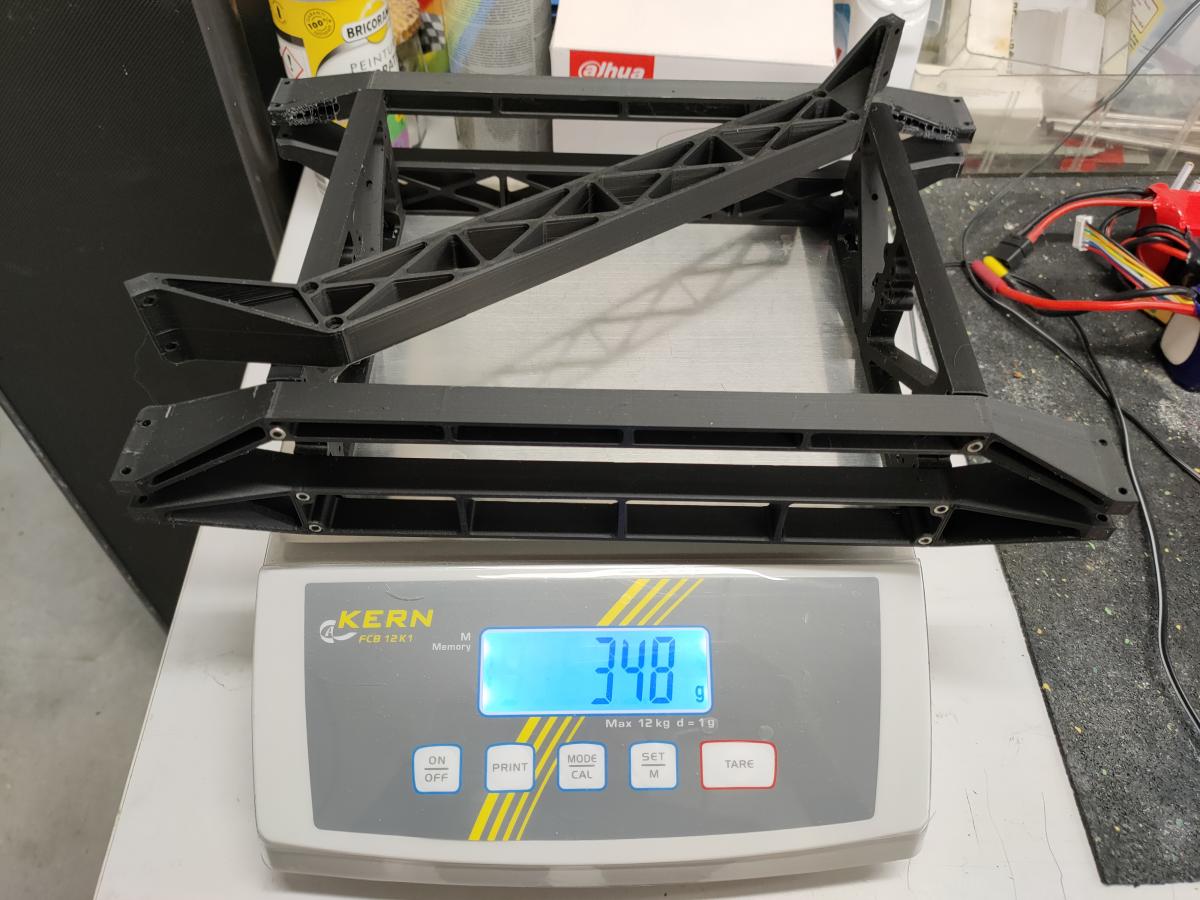
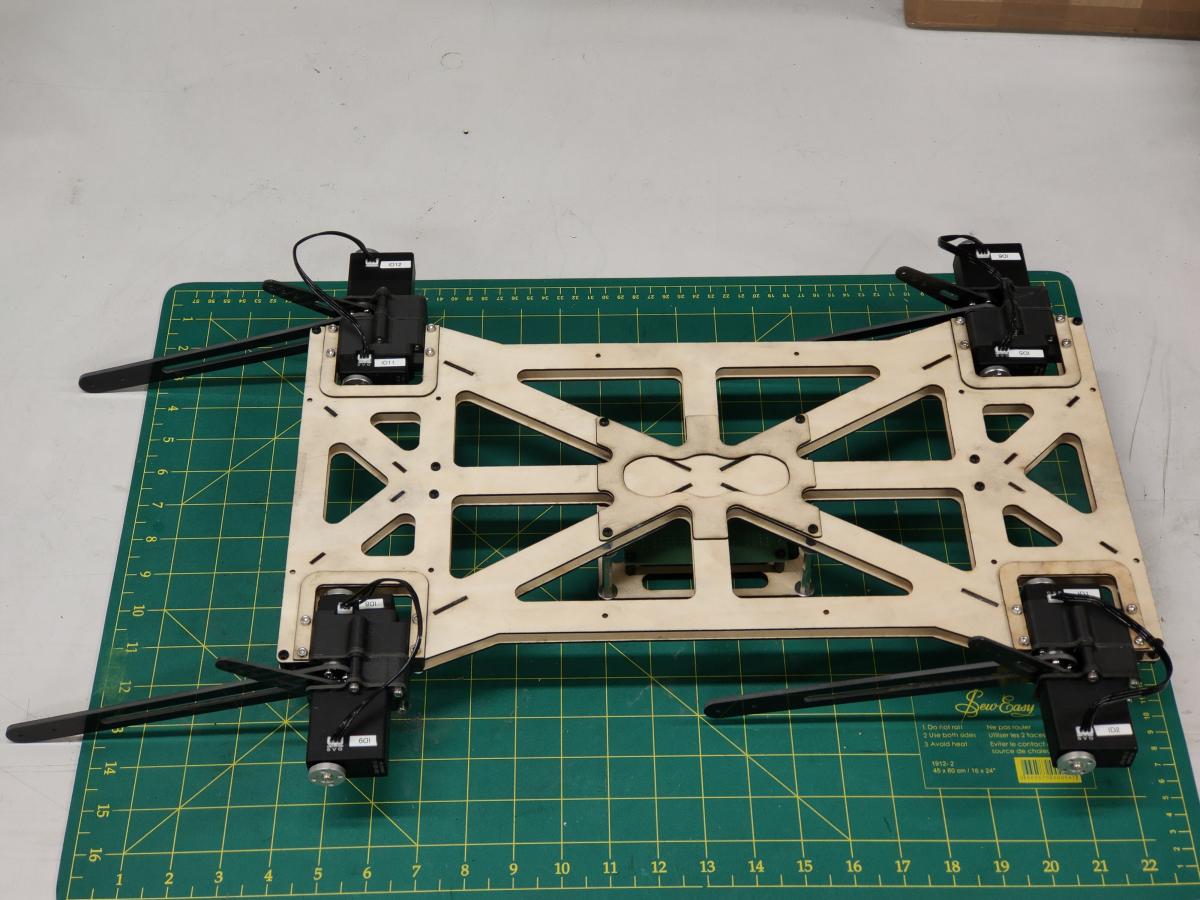
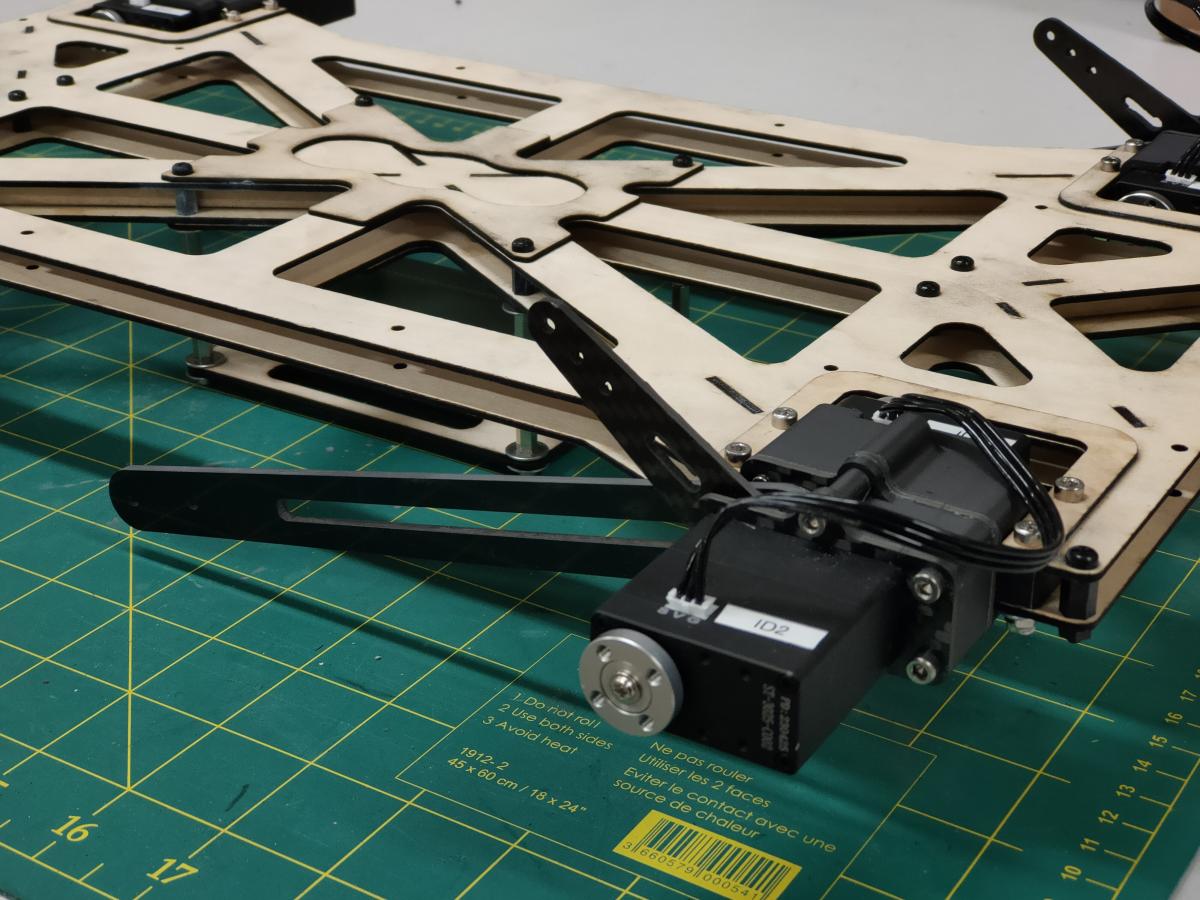
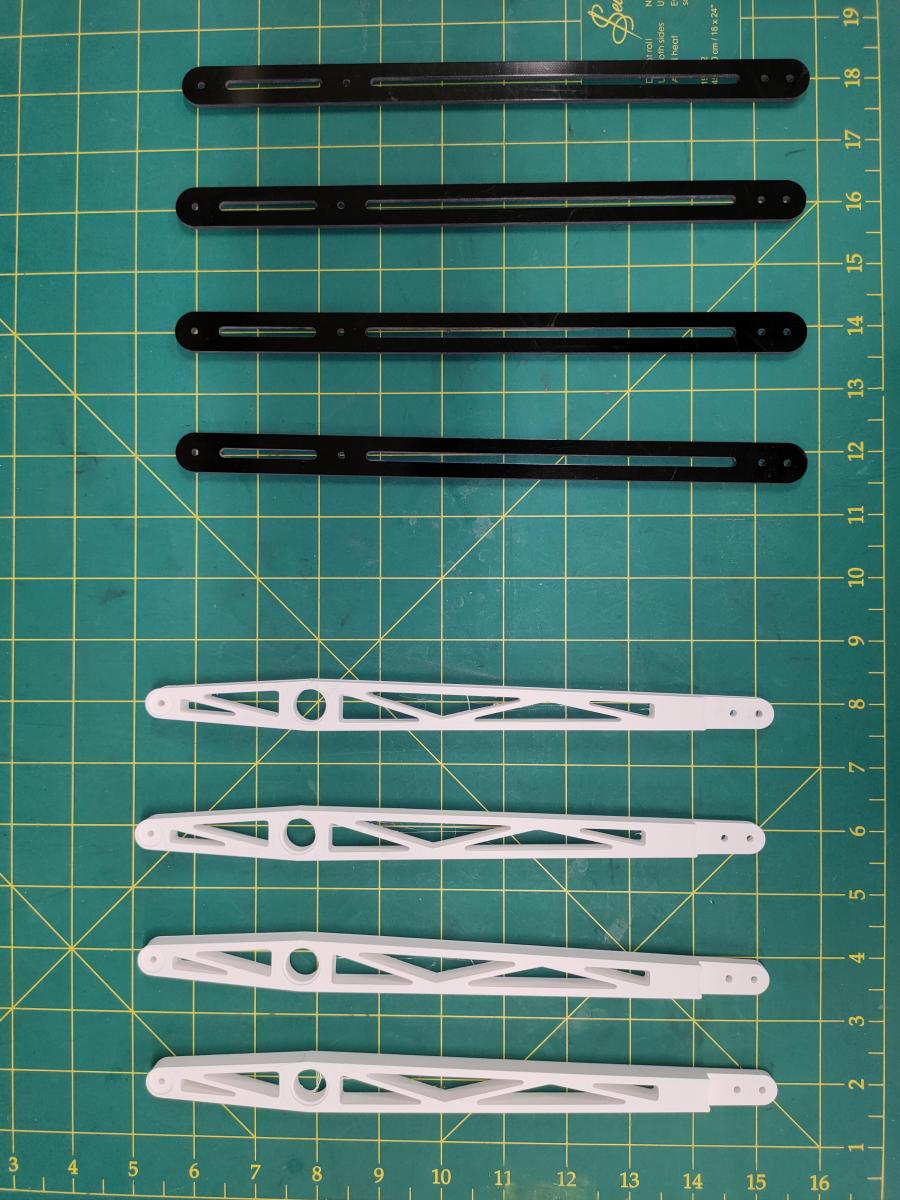
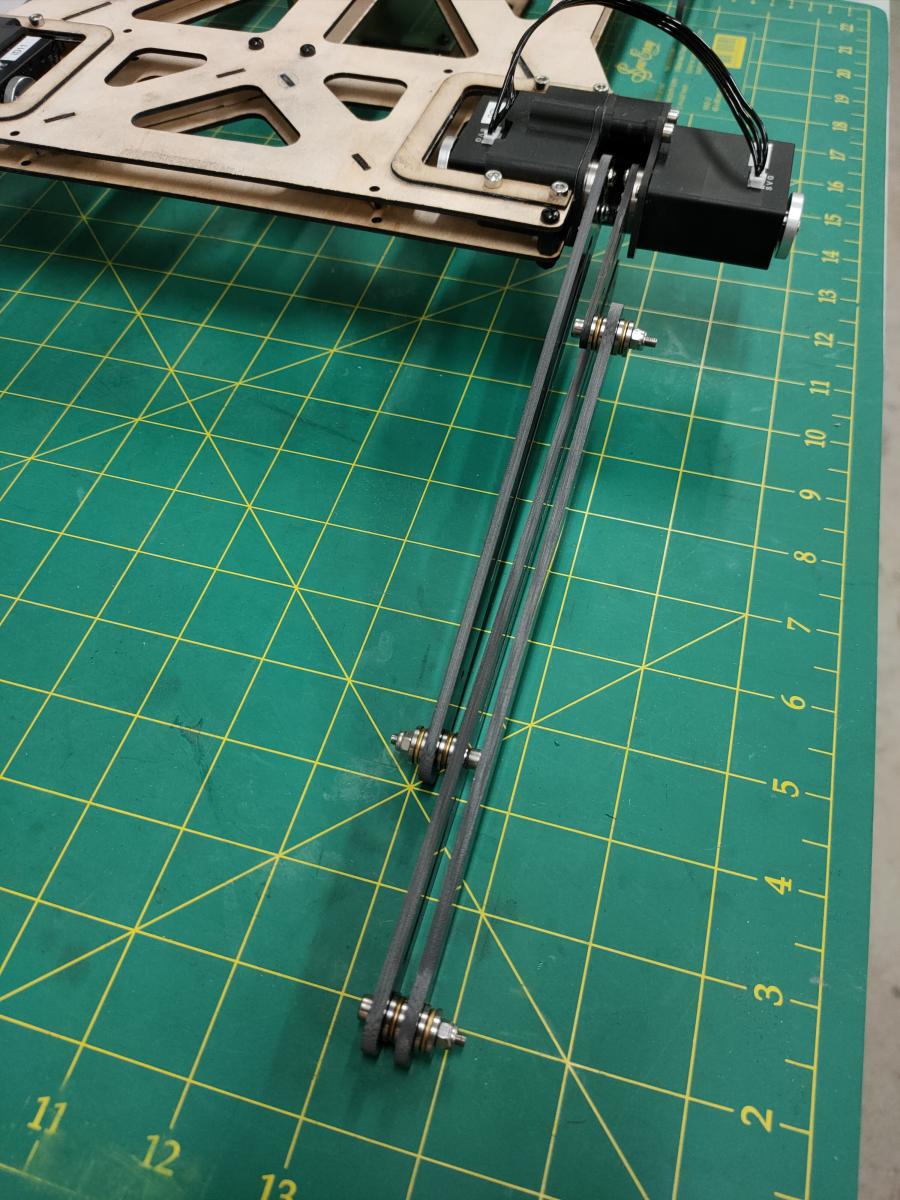
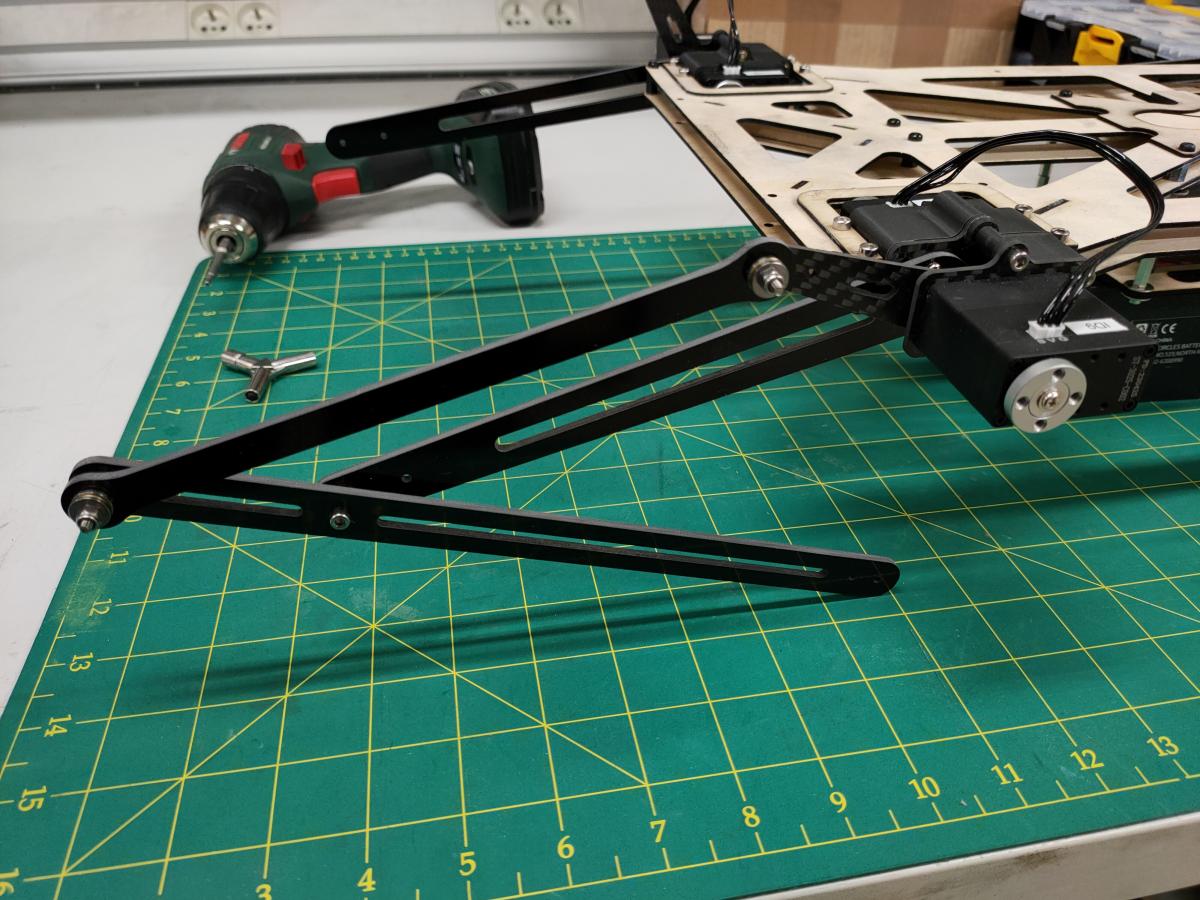
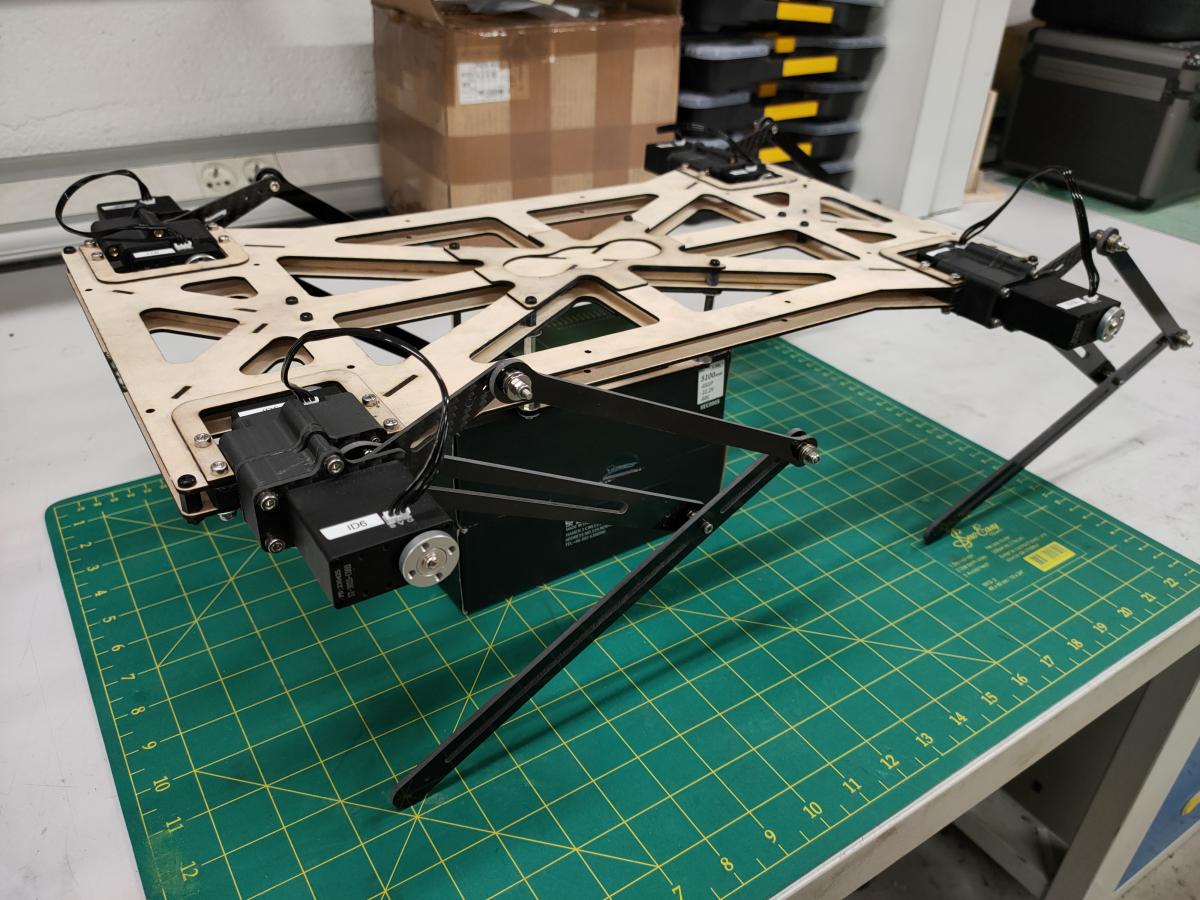
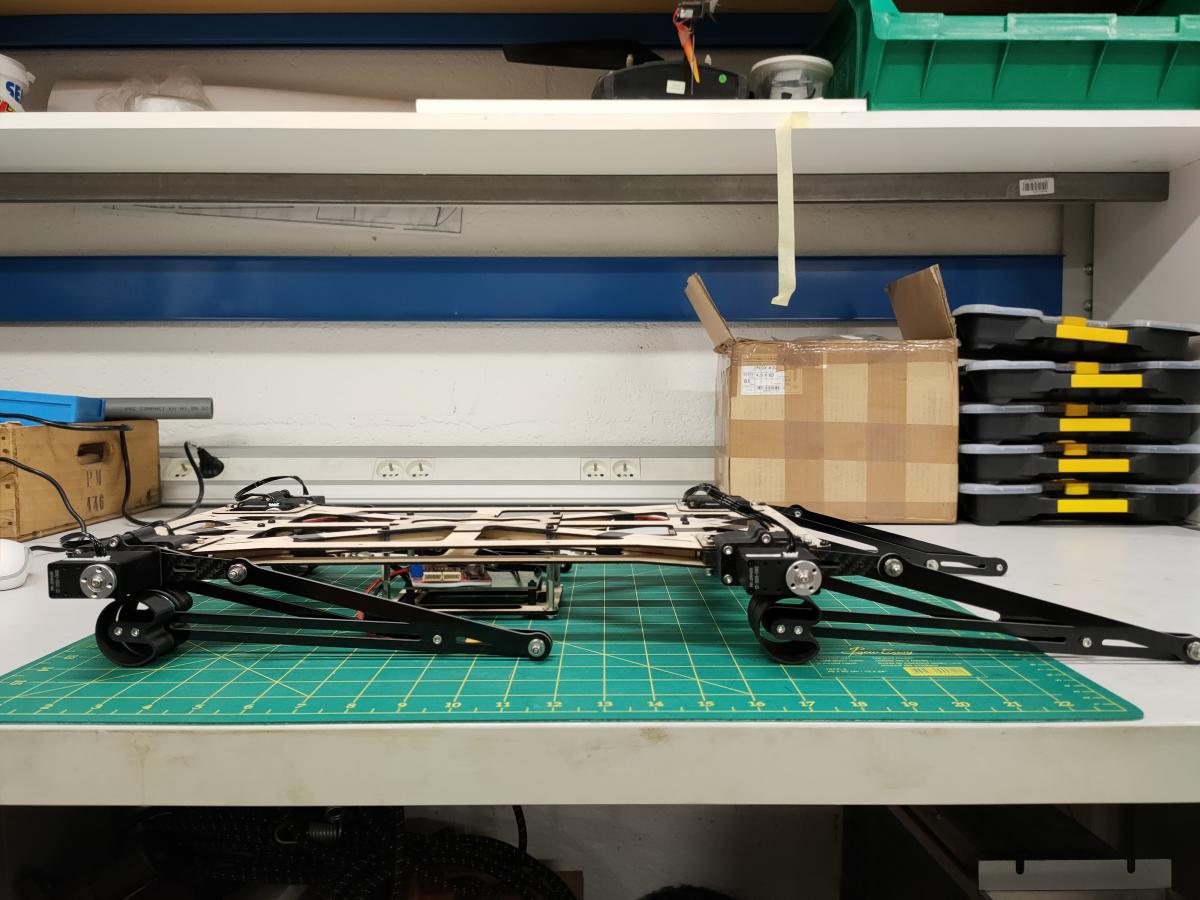
Je me lance dans un quadrupède "maison" en 8 DOF, de grande taille, pour aller en ligne droite (épreuve n°3).
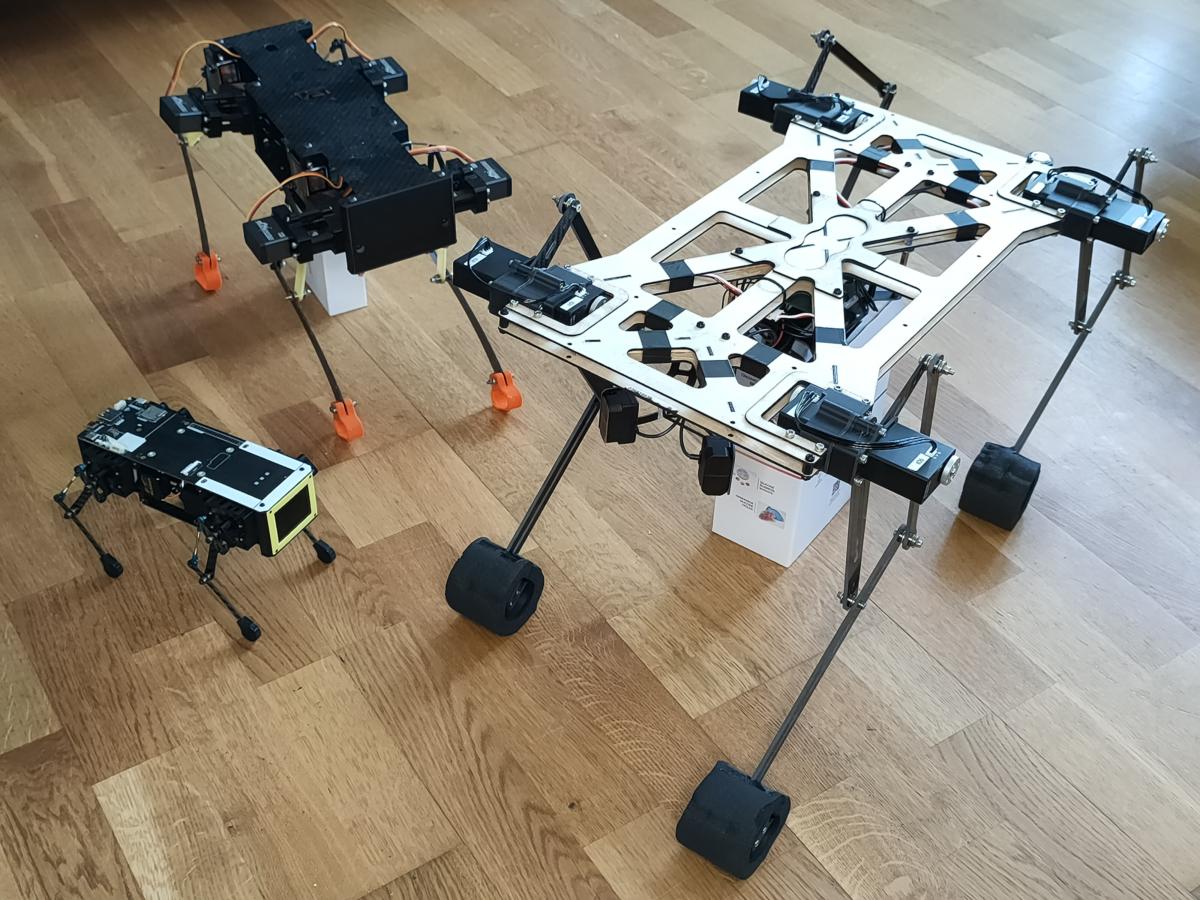
Mini-Pupper *** Pupper (Stanford) *** Maxi Pupper "Racer"
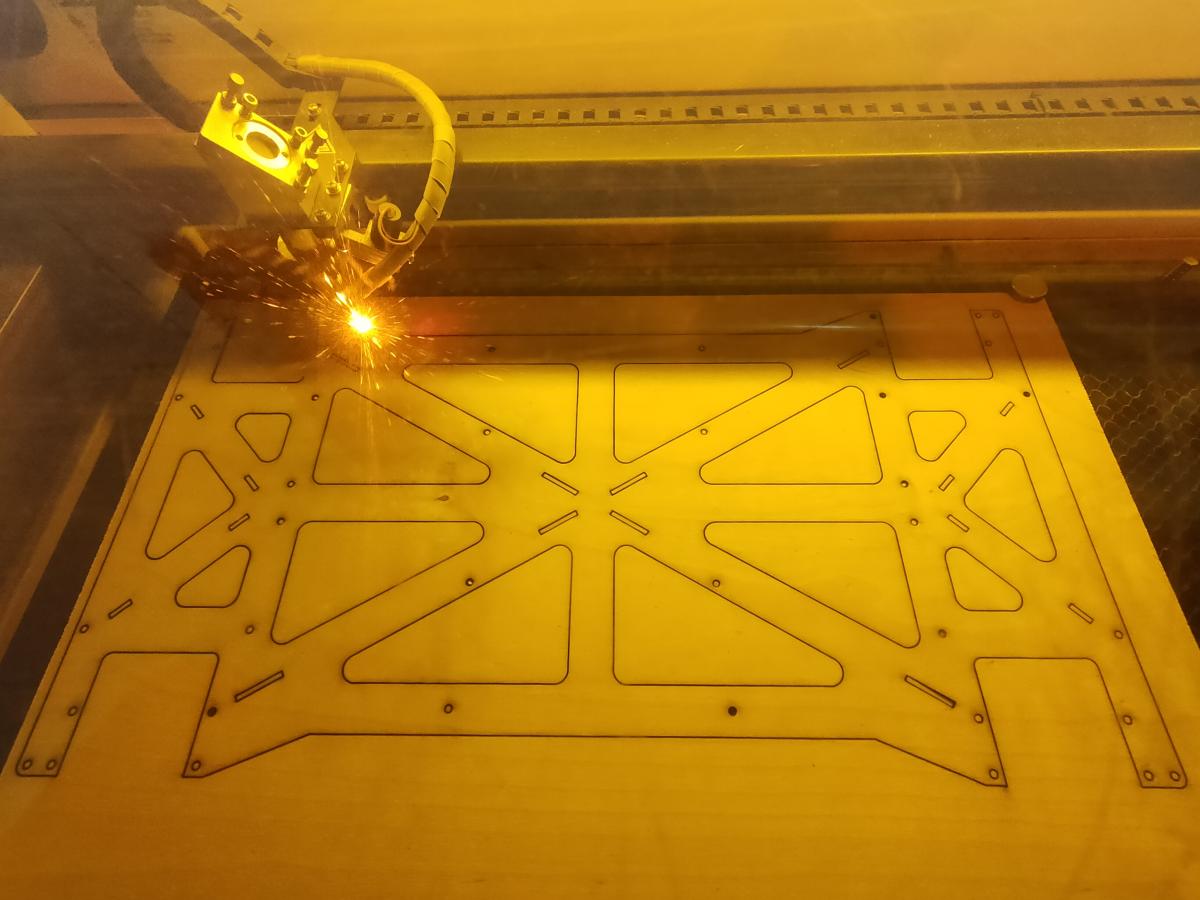
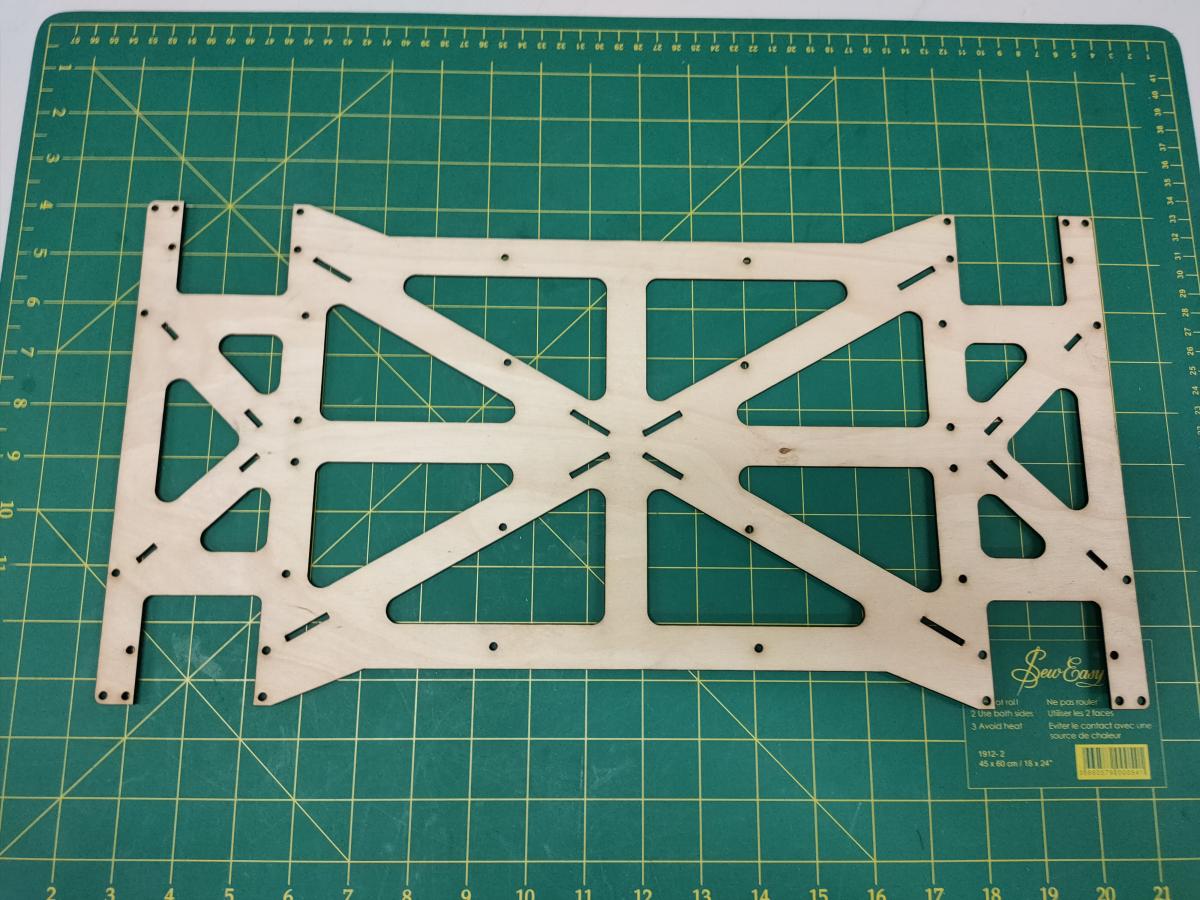
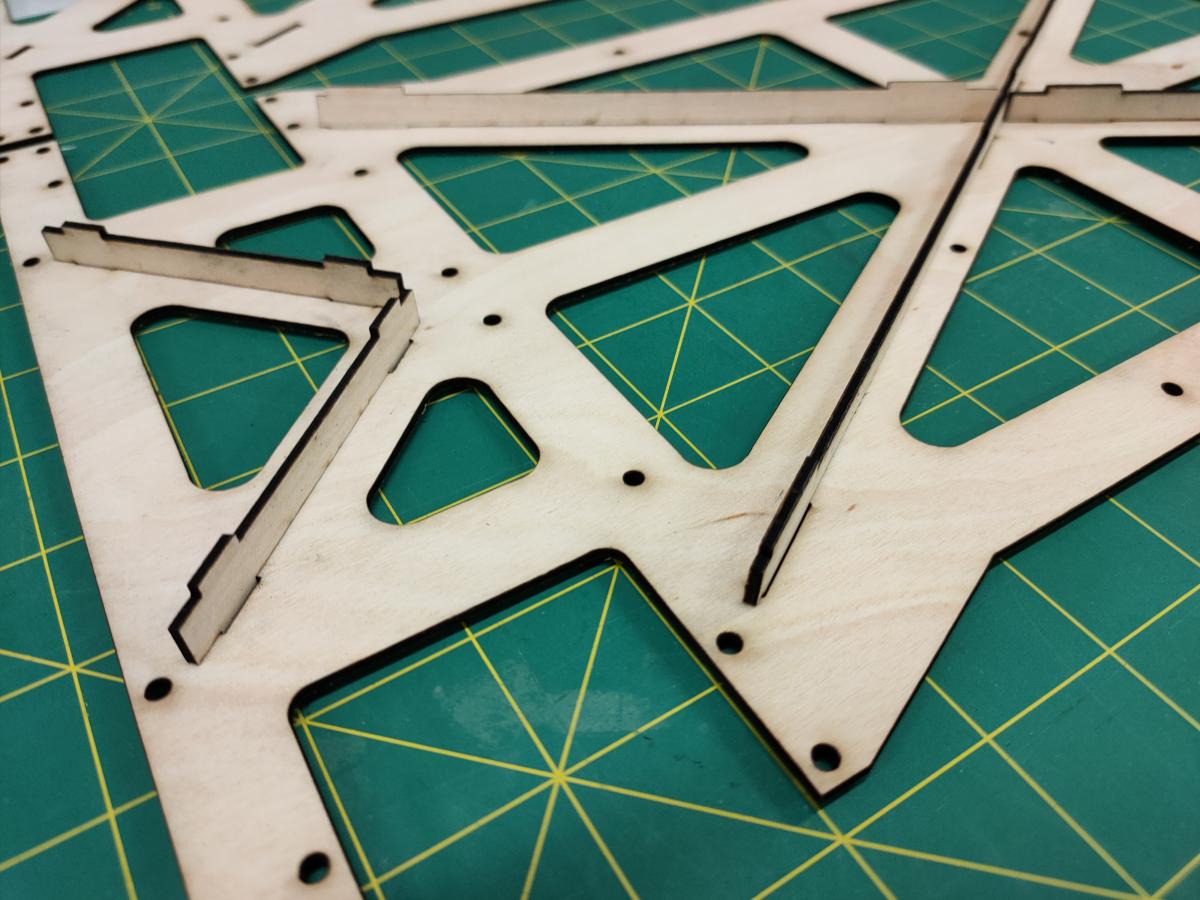
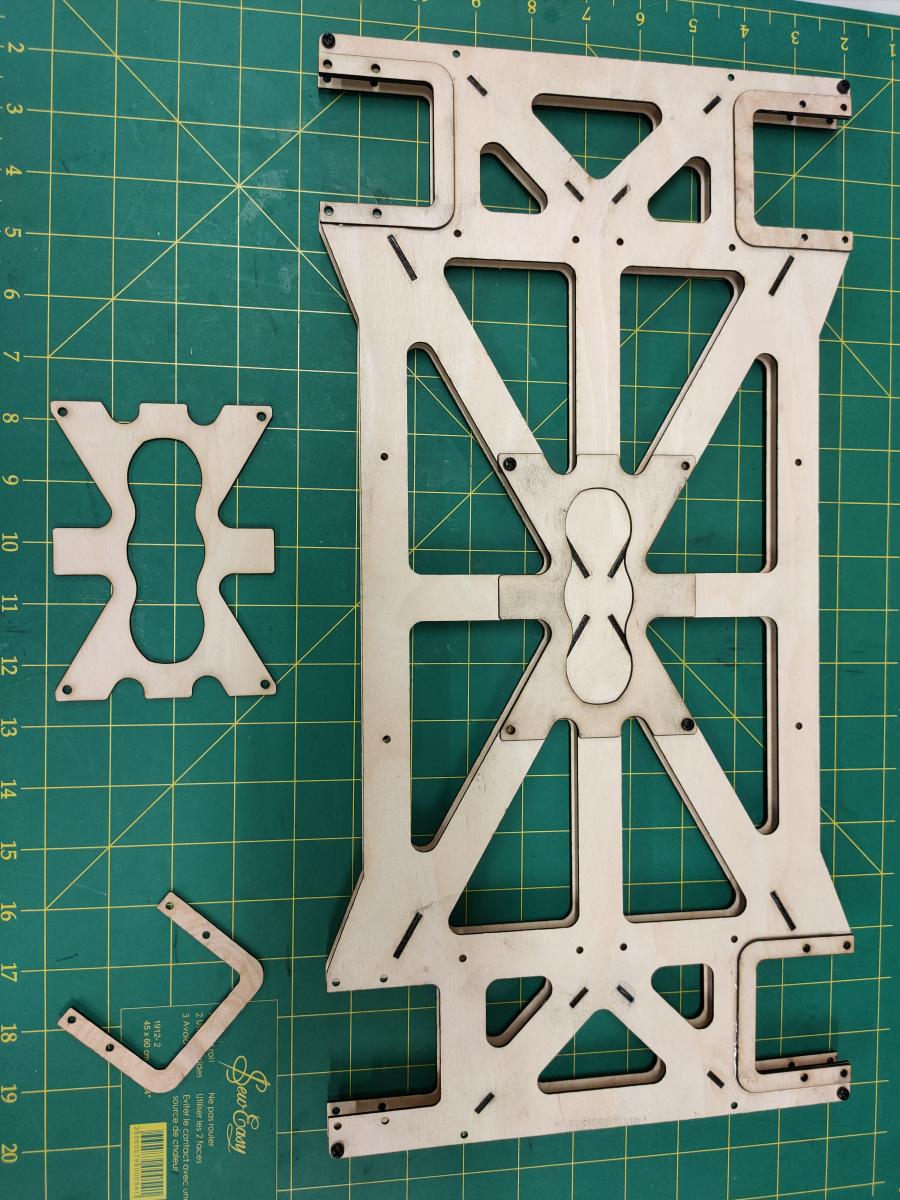
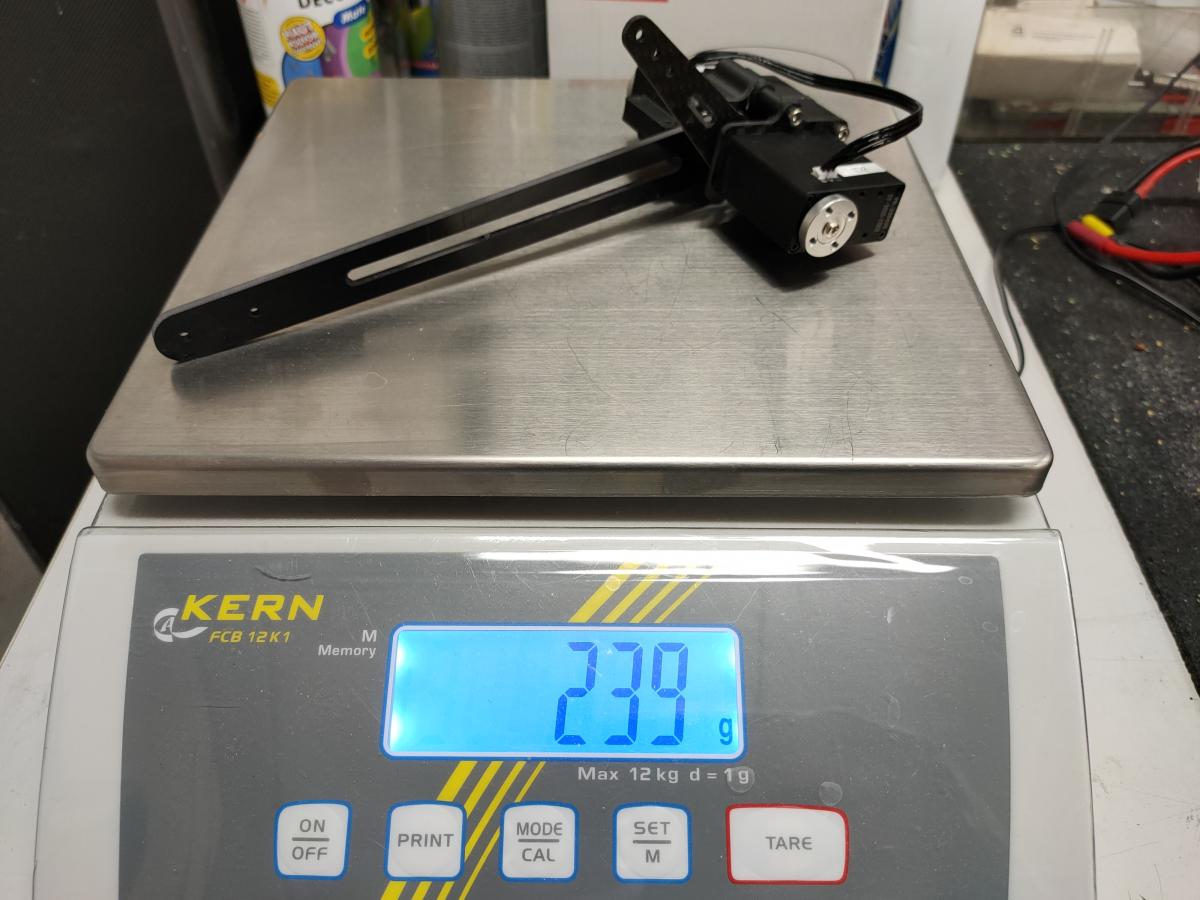
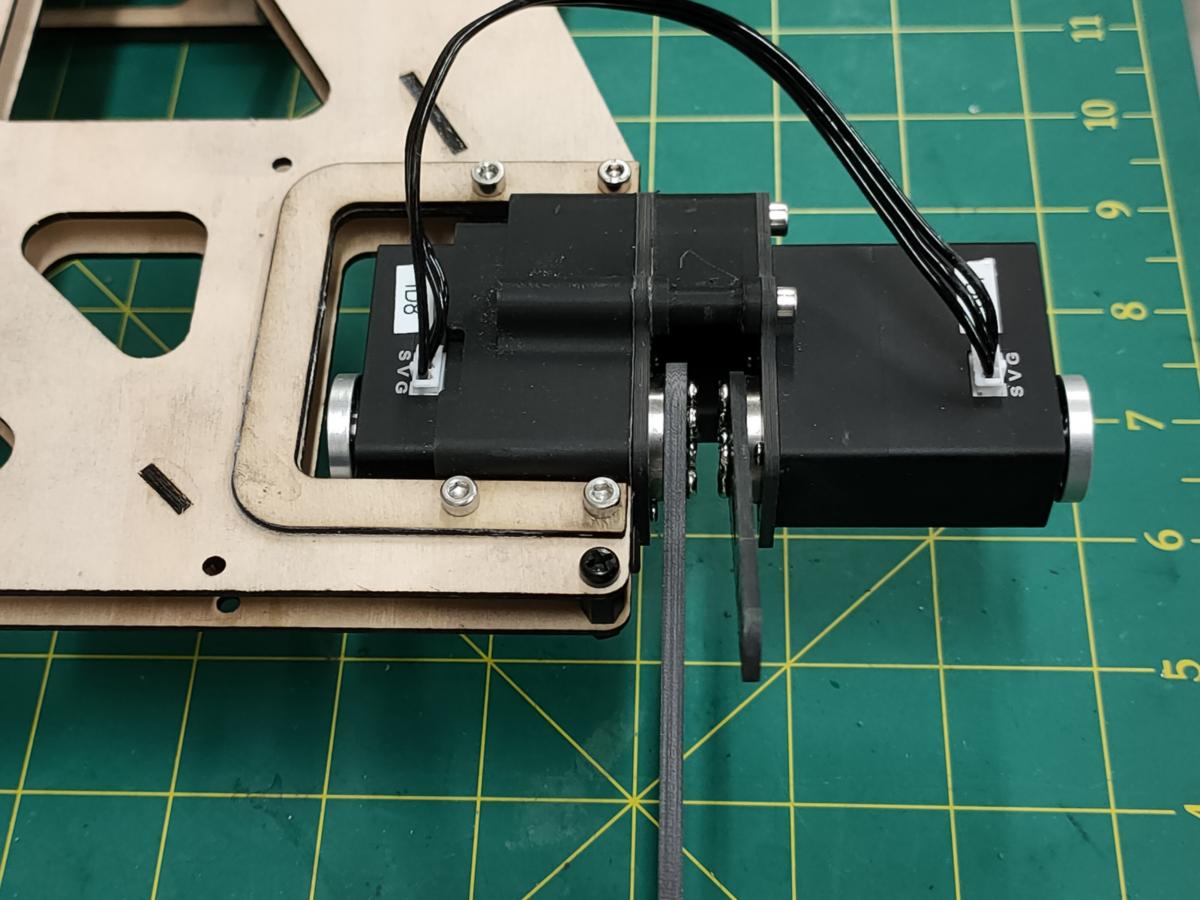
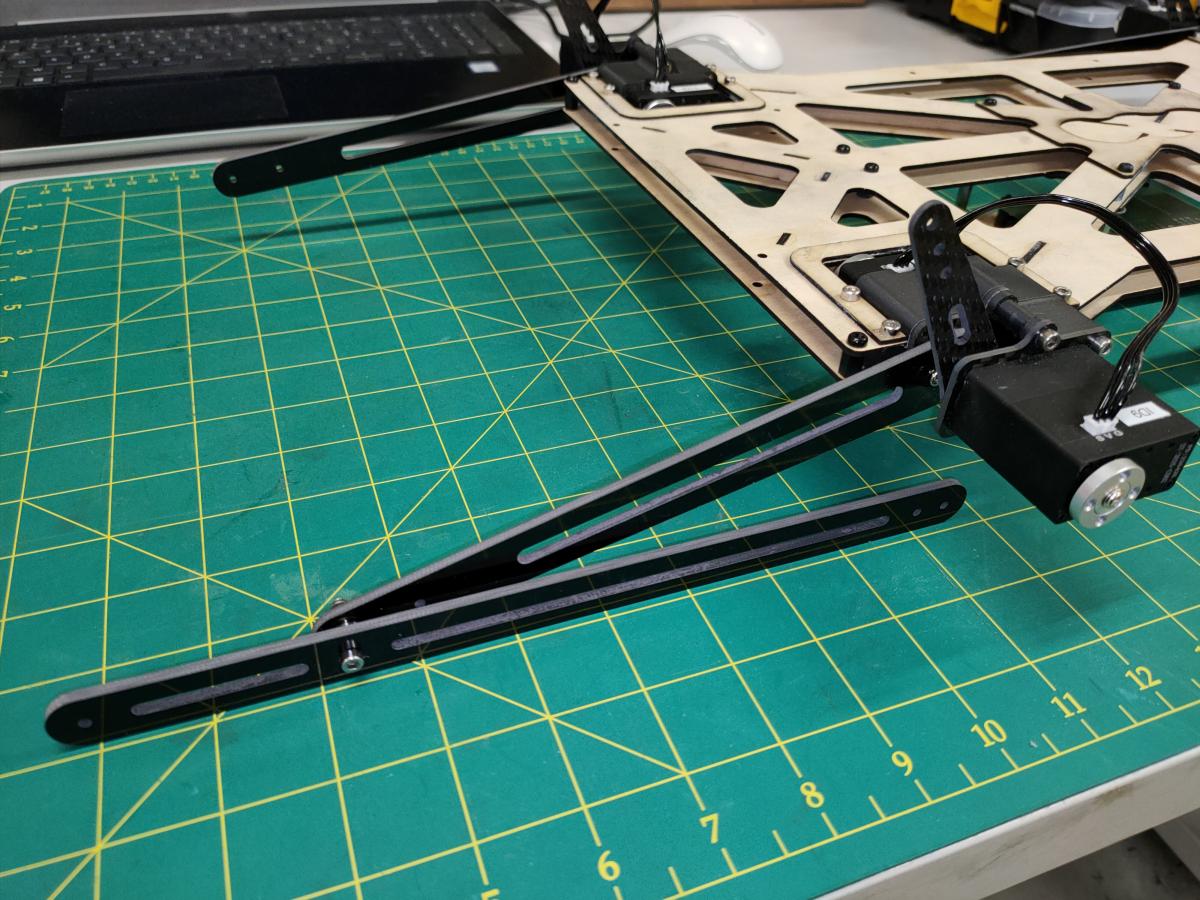
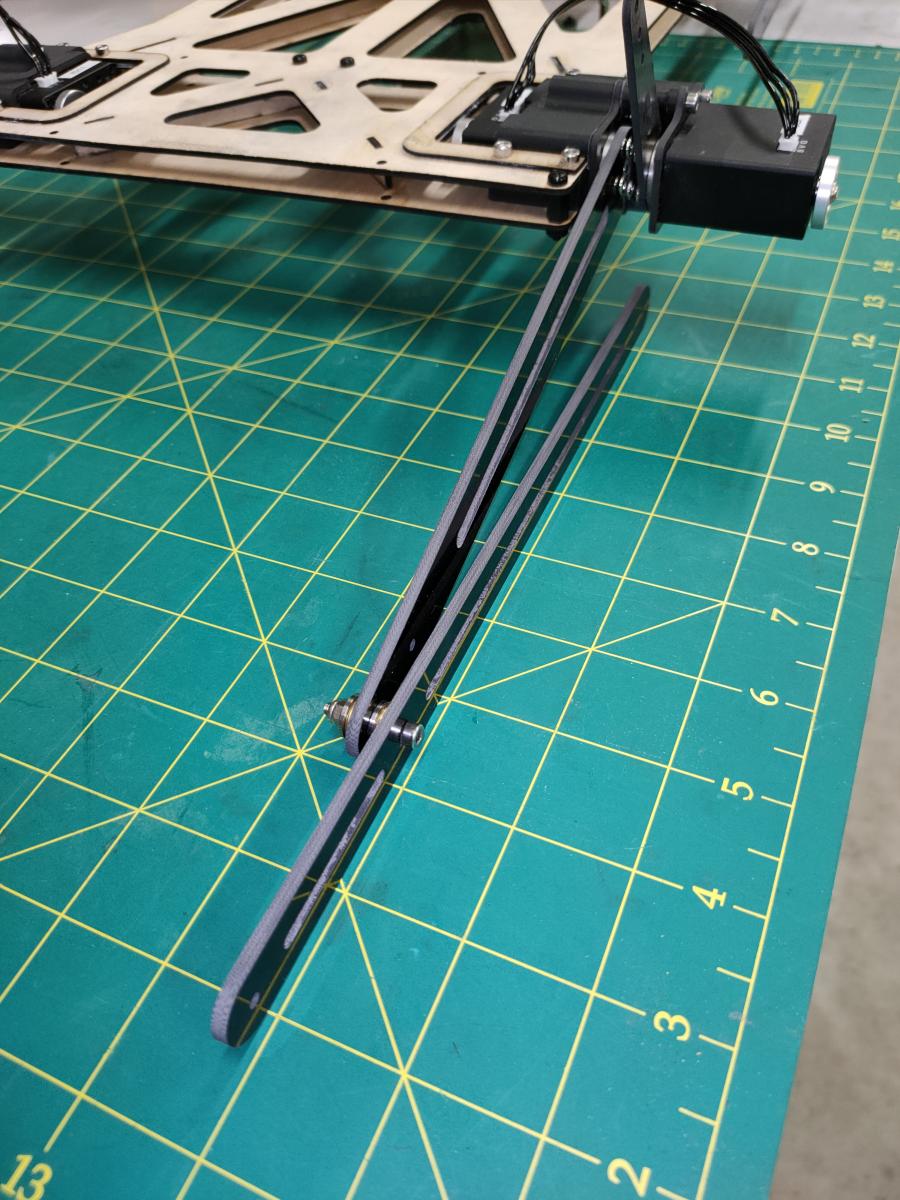
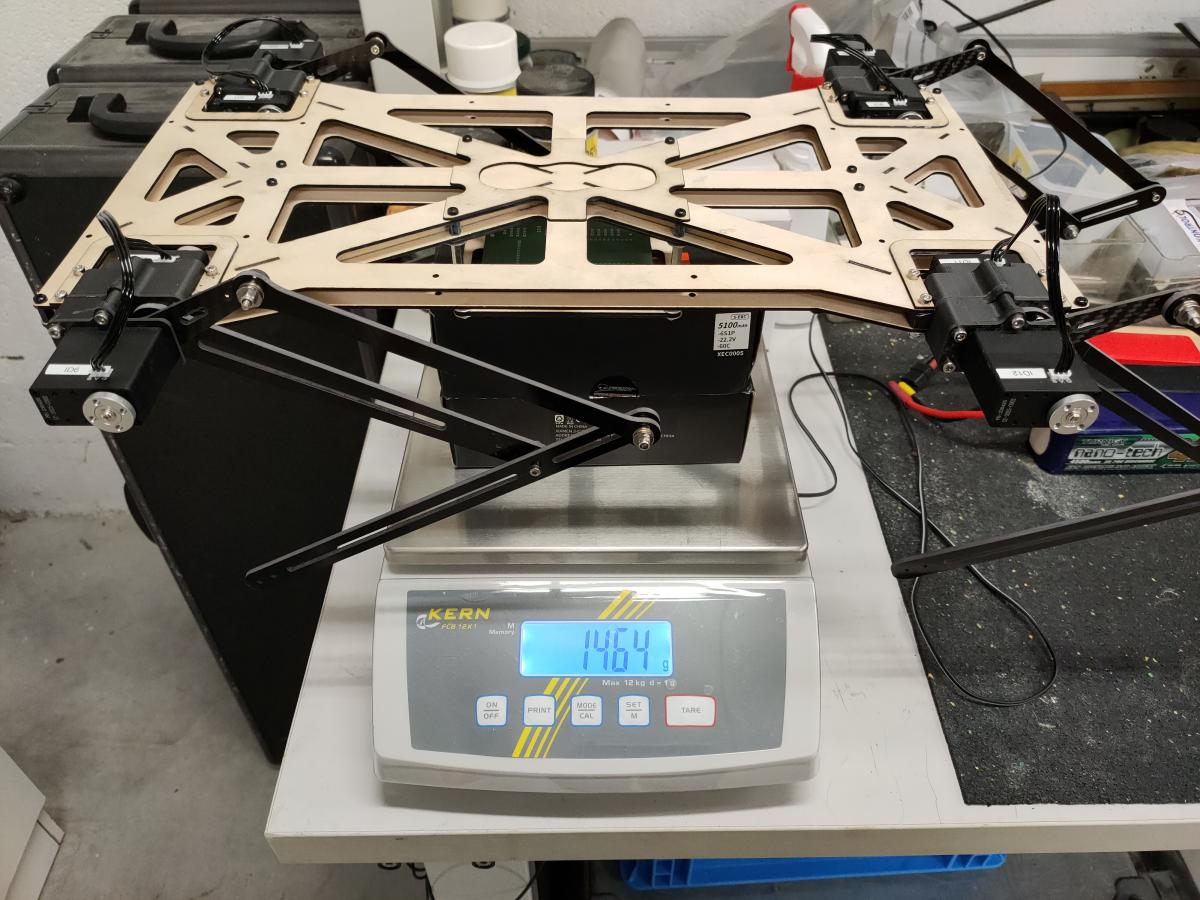
La suite en images.









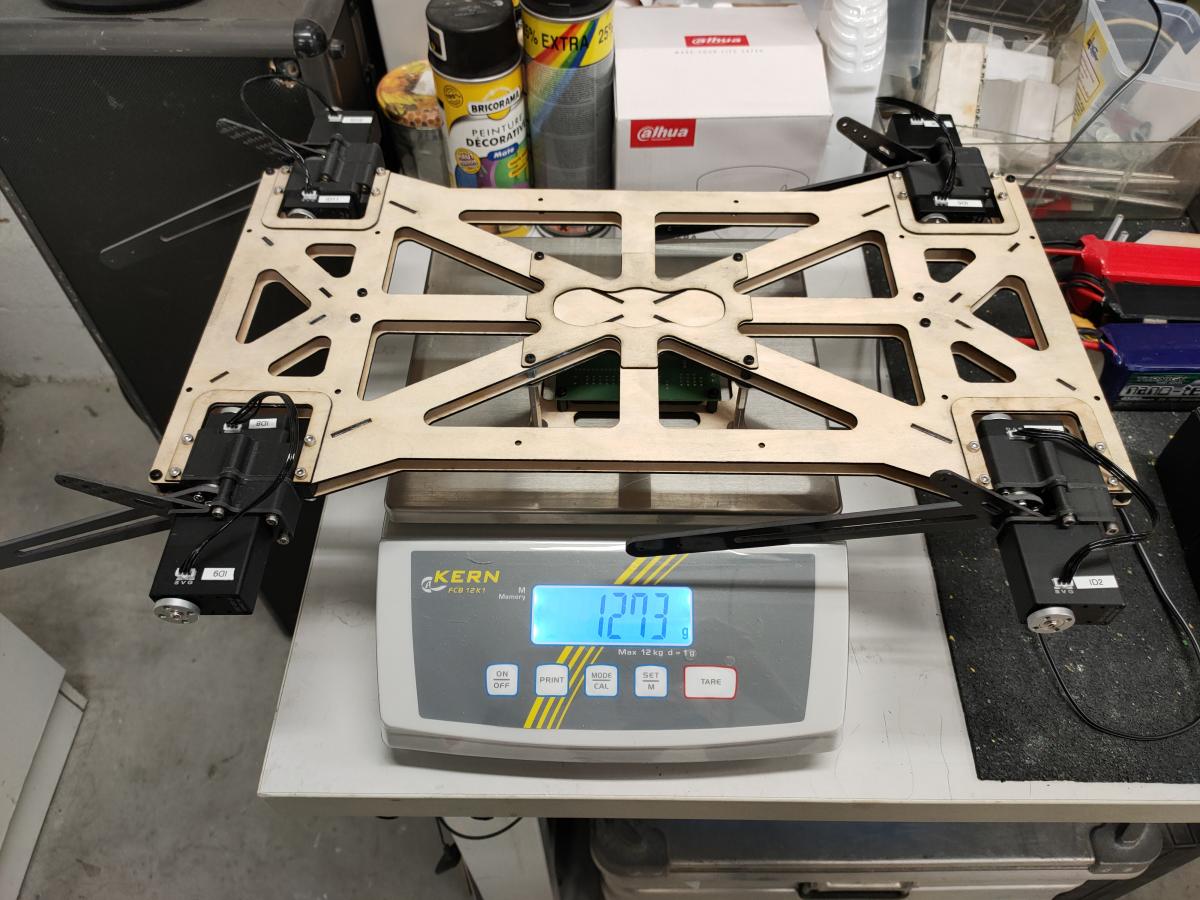

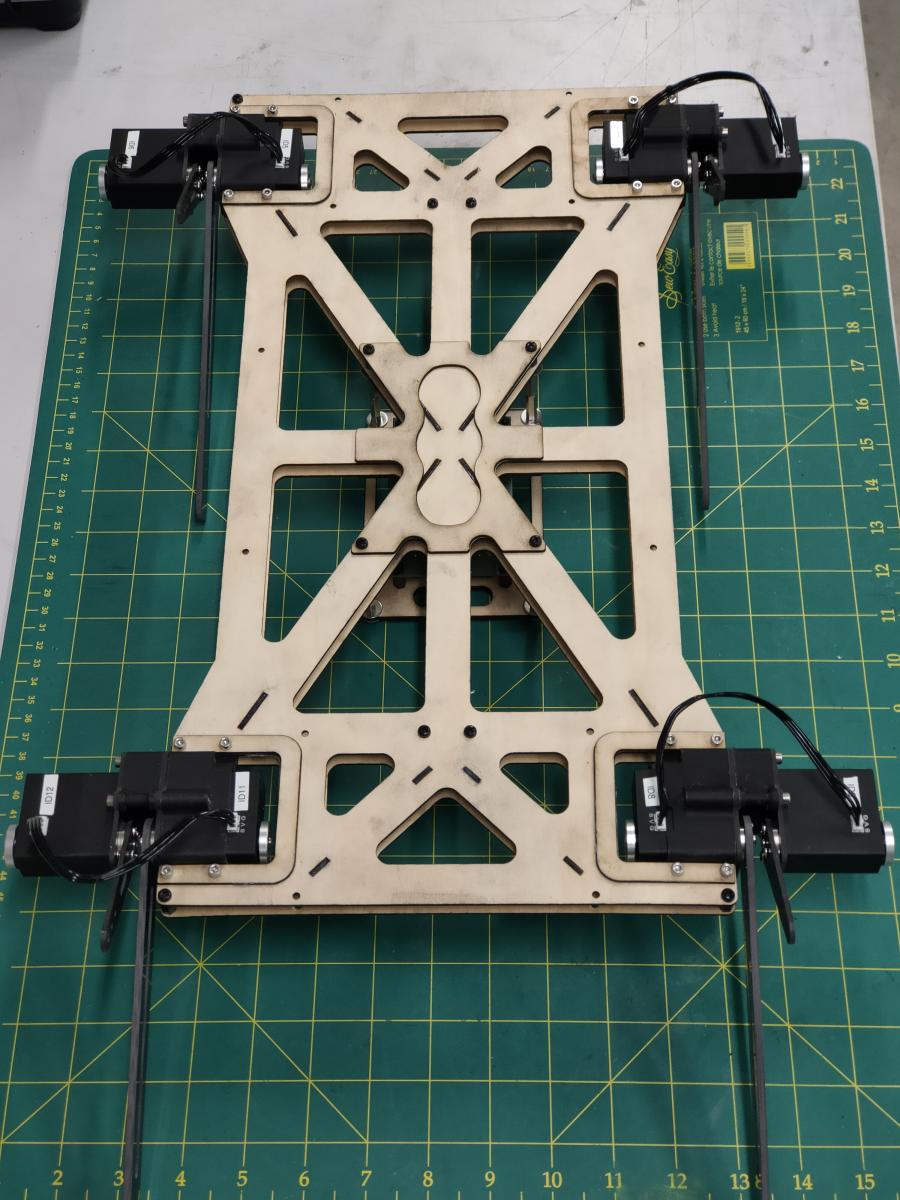




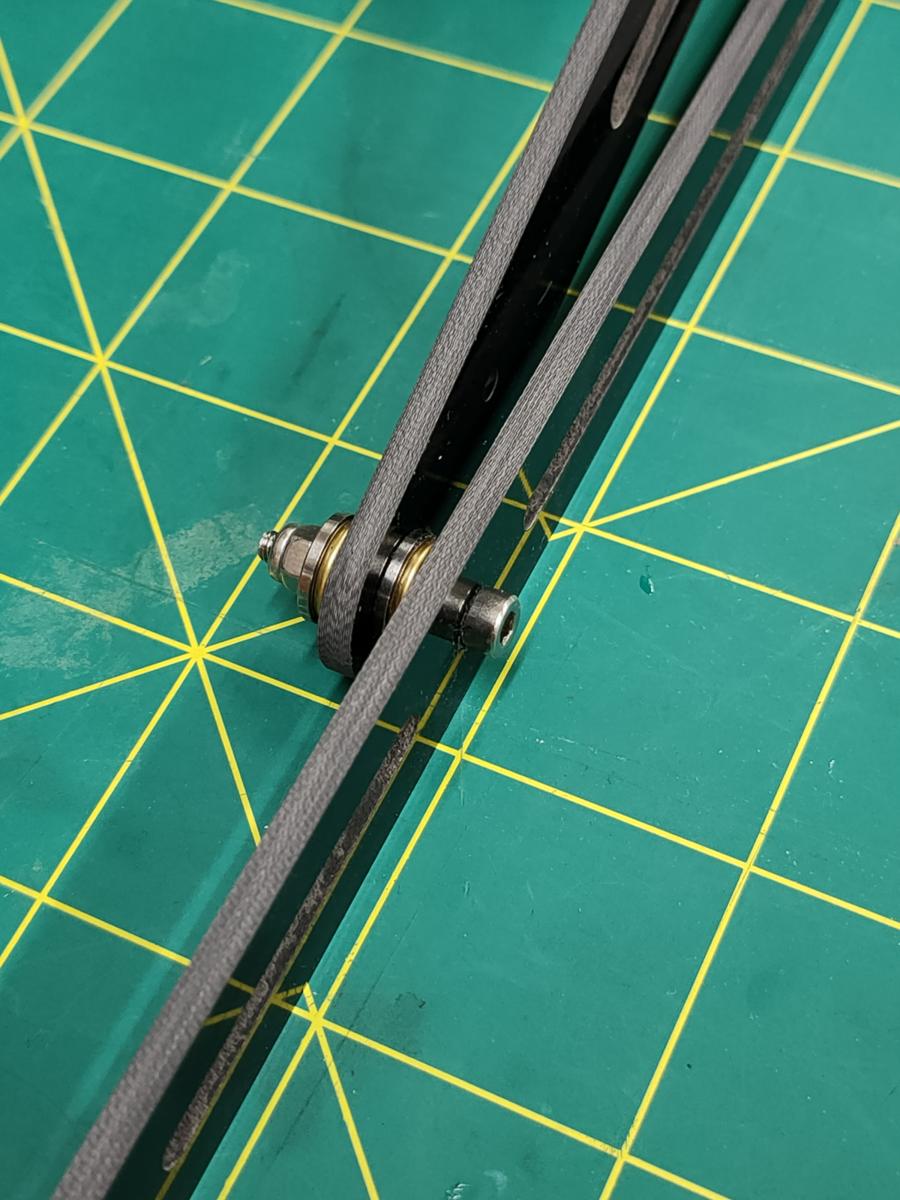
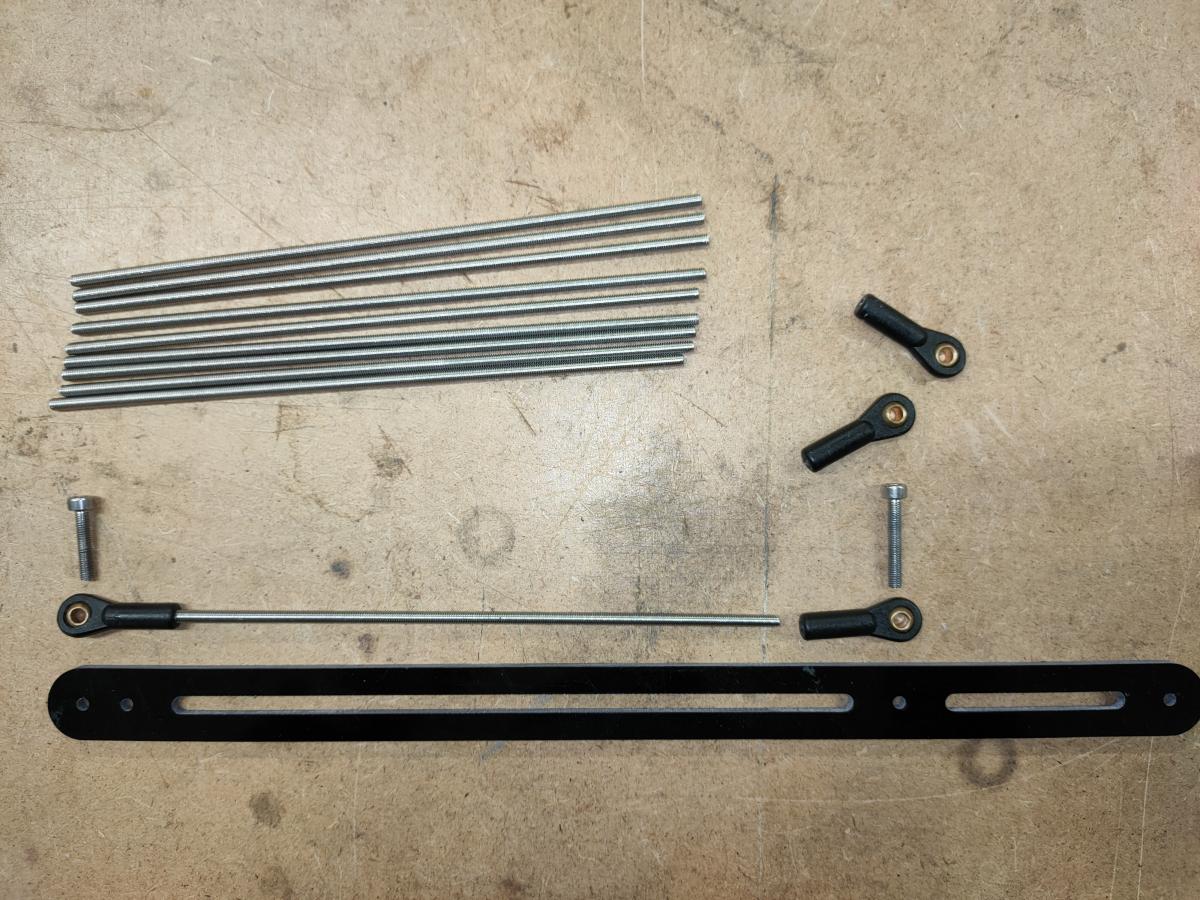
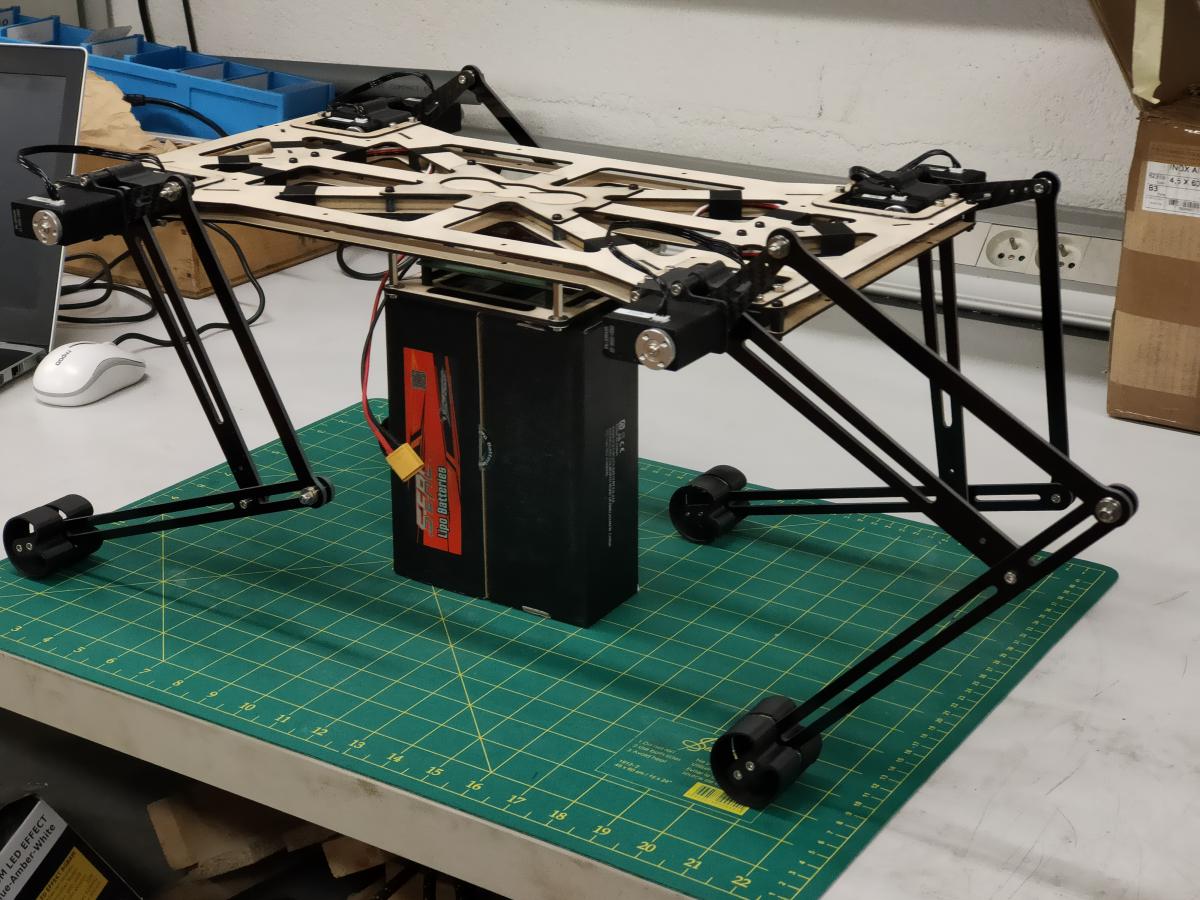
 Mauvais karma ces deniers temps ! Il me manque 2 cm de tige filetée.
Mauvais karma ces deniers temps ! Il me manque 2 cm de tige filetée.
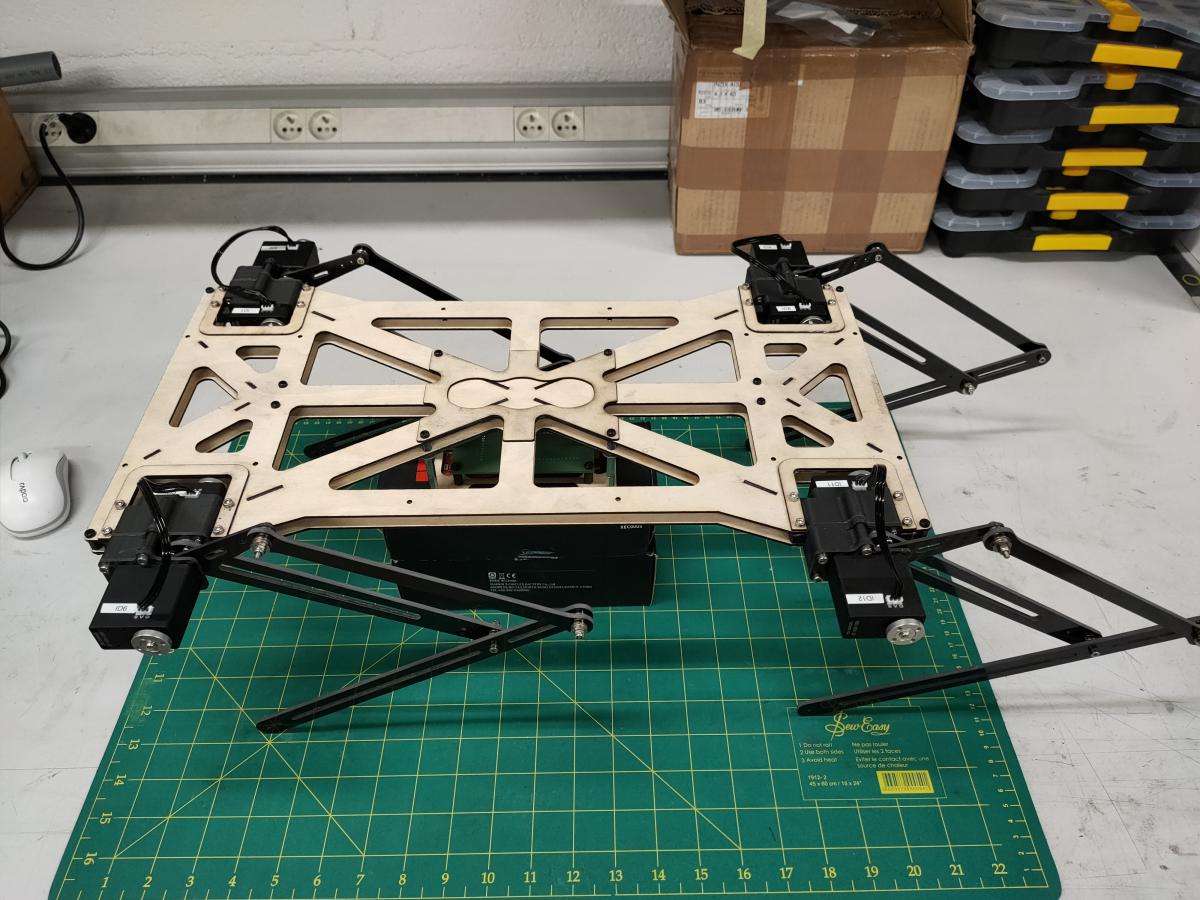



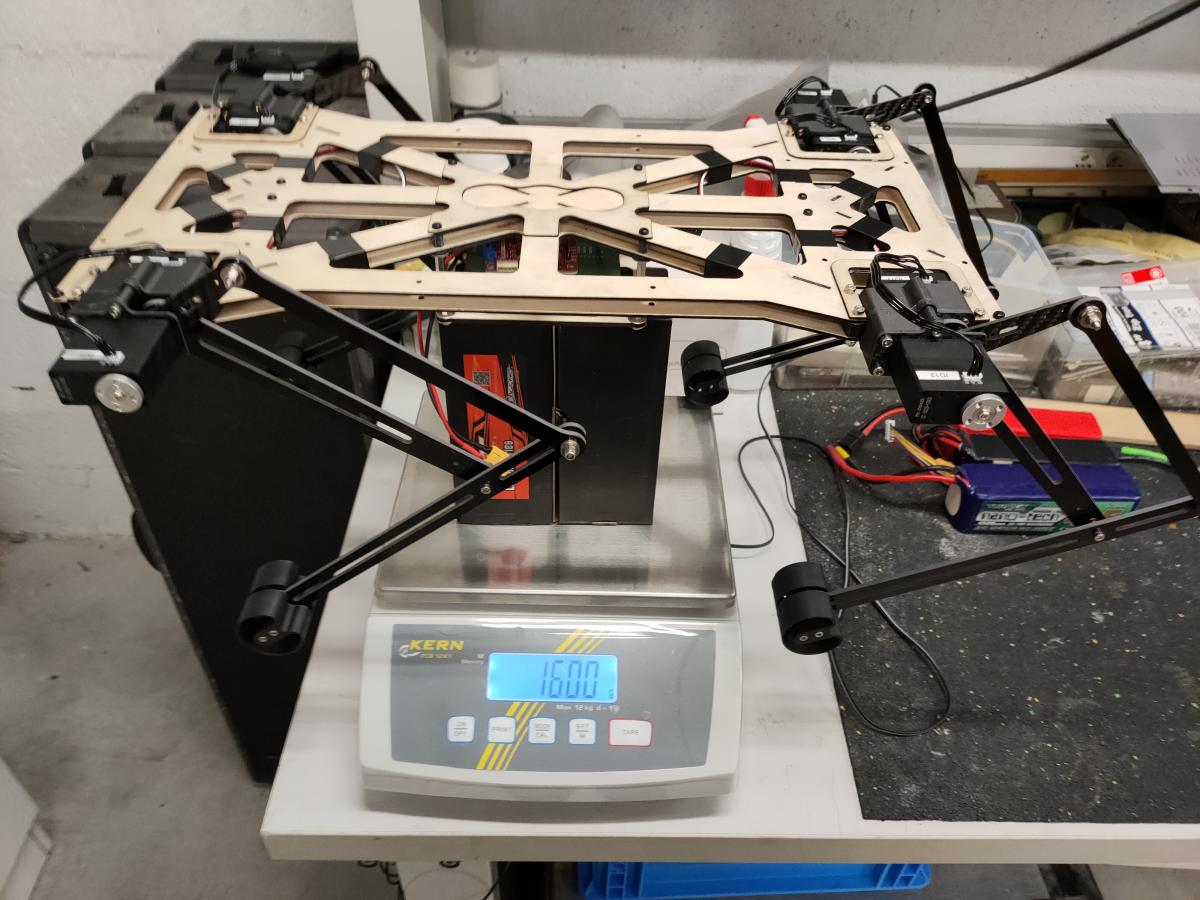




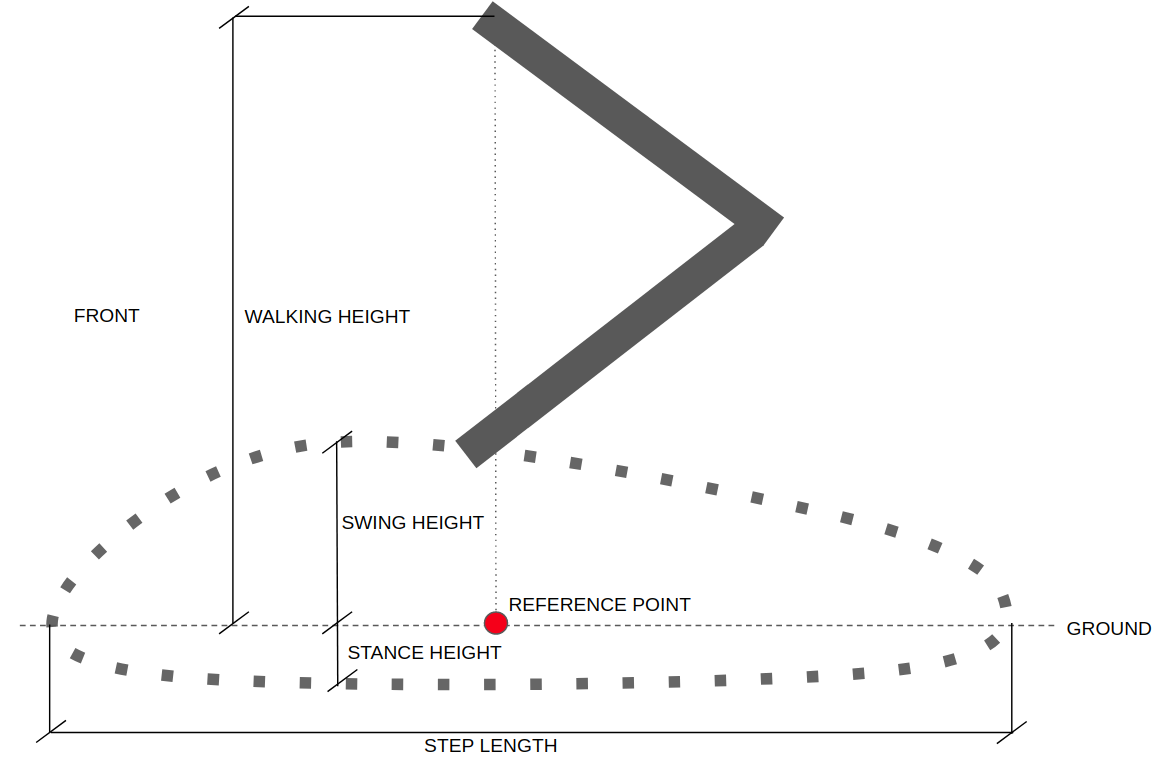
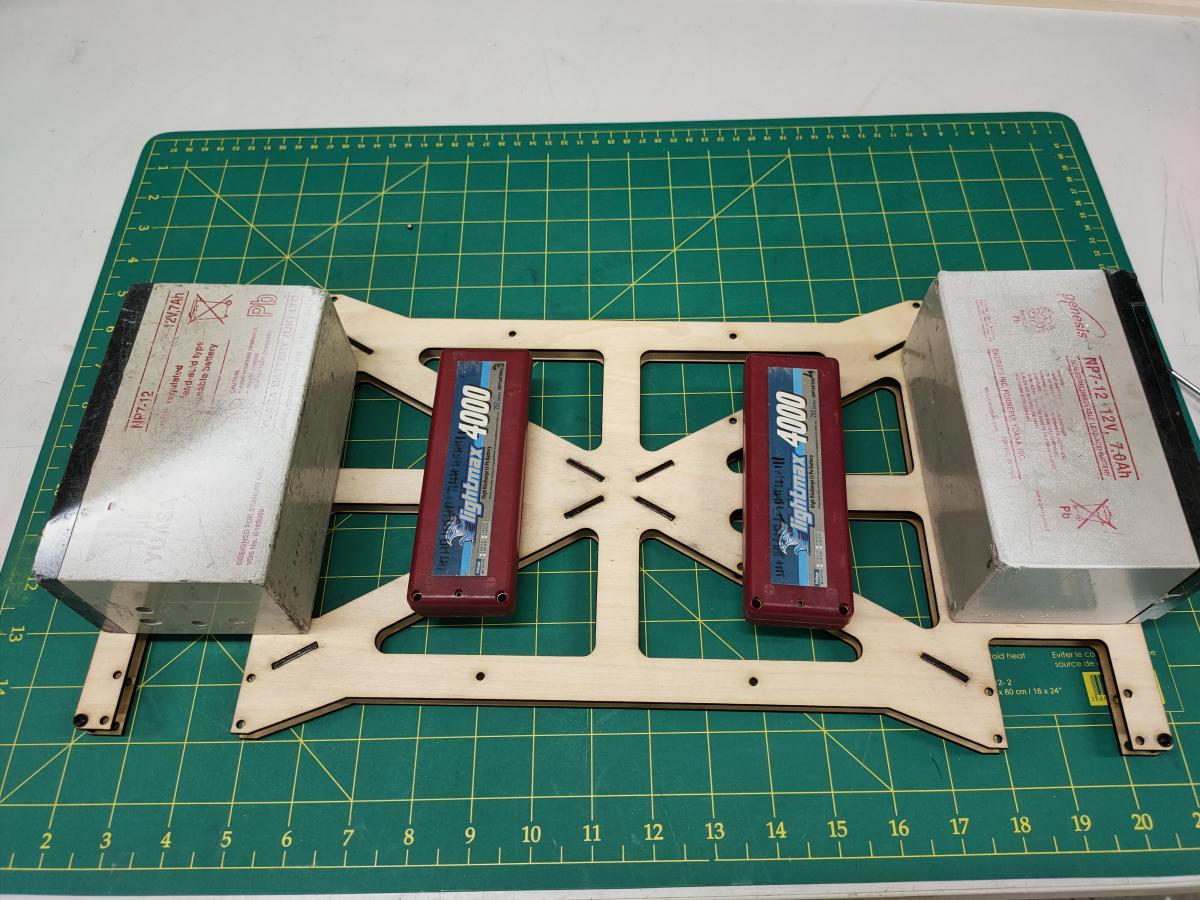
 Je vais tester avec la correction de Cg (reculer/avancer le centre de la démarche par rapport au centre géométrique du robot)
Je vais tester avec la correction de Cg (reculer/avancer le centre de la démarche par rapport au centre géométrique du robot)