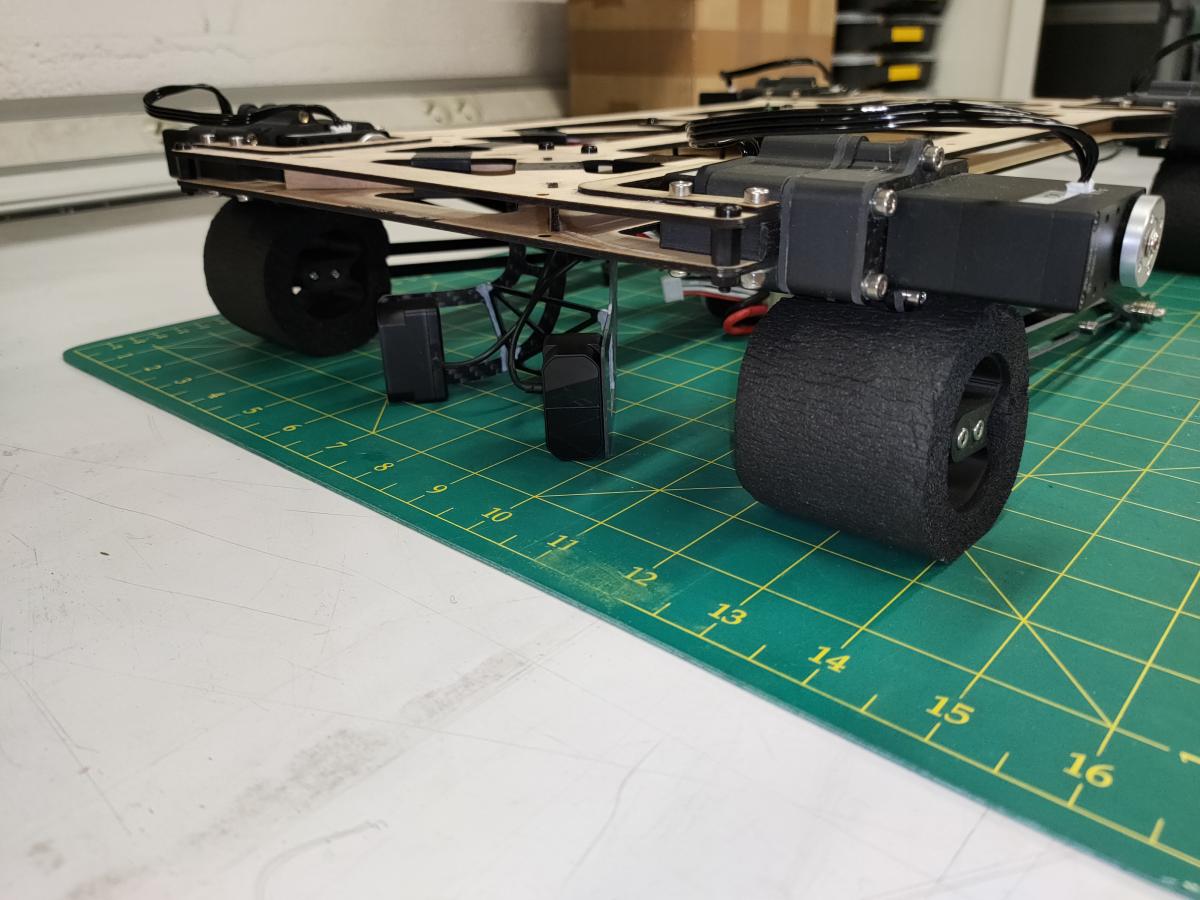
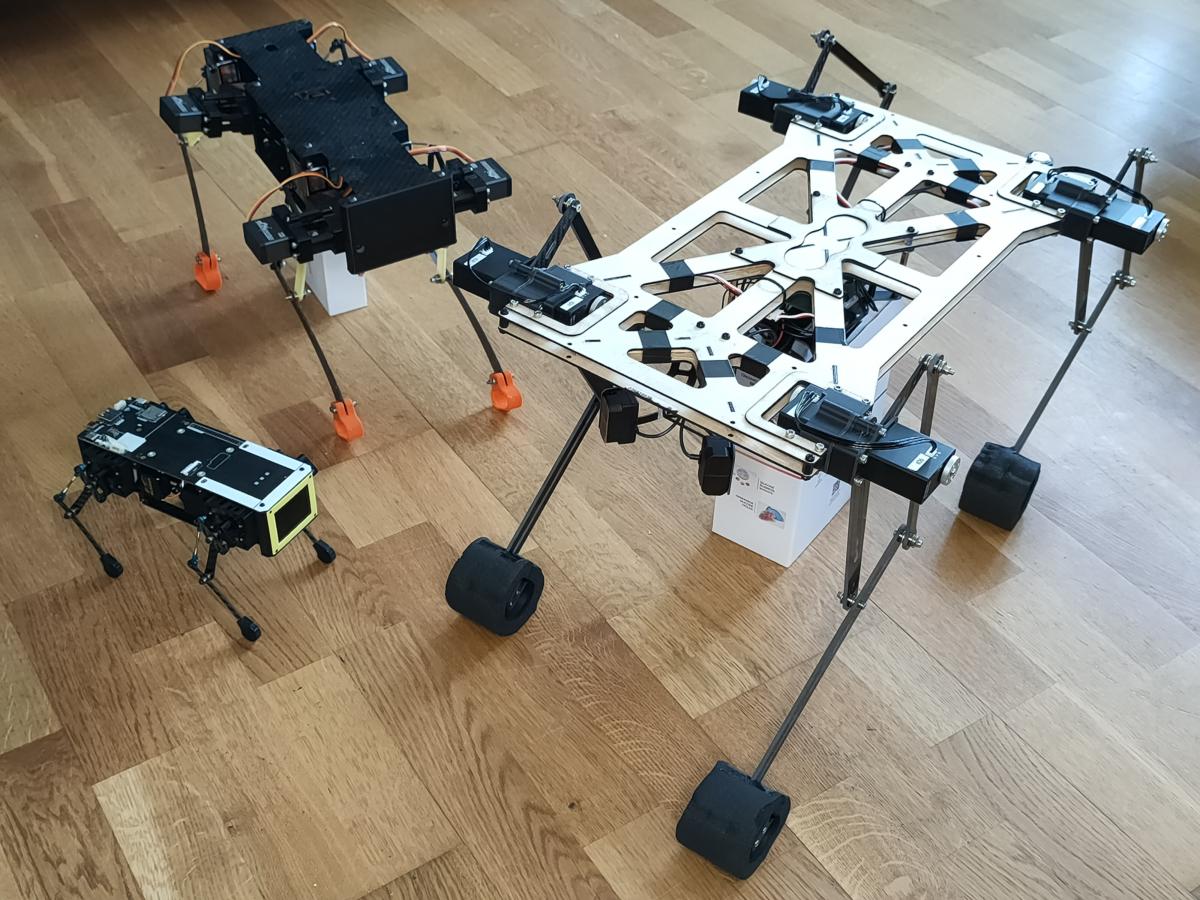
En tout cas, l'allure est superbe !
Bravo !
Merci ! 
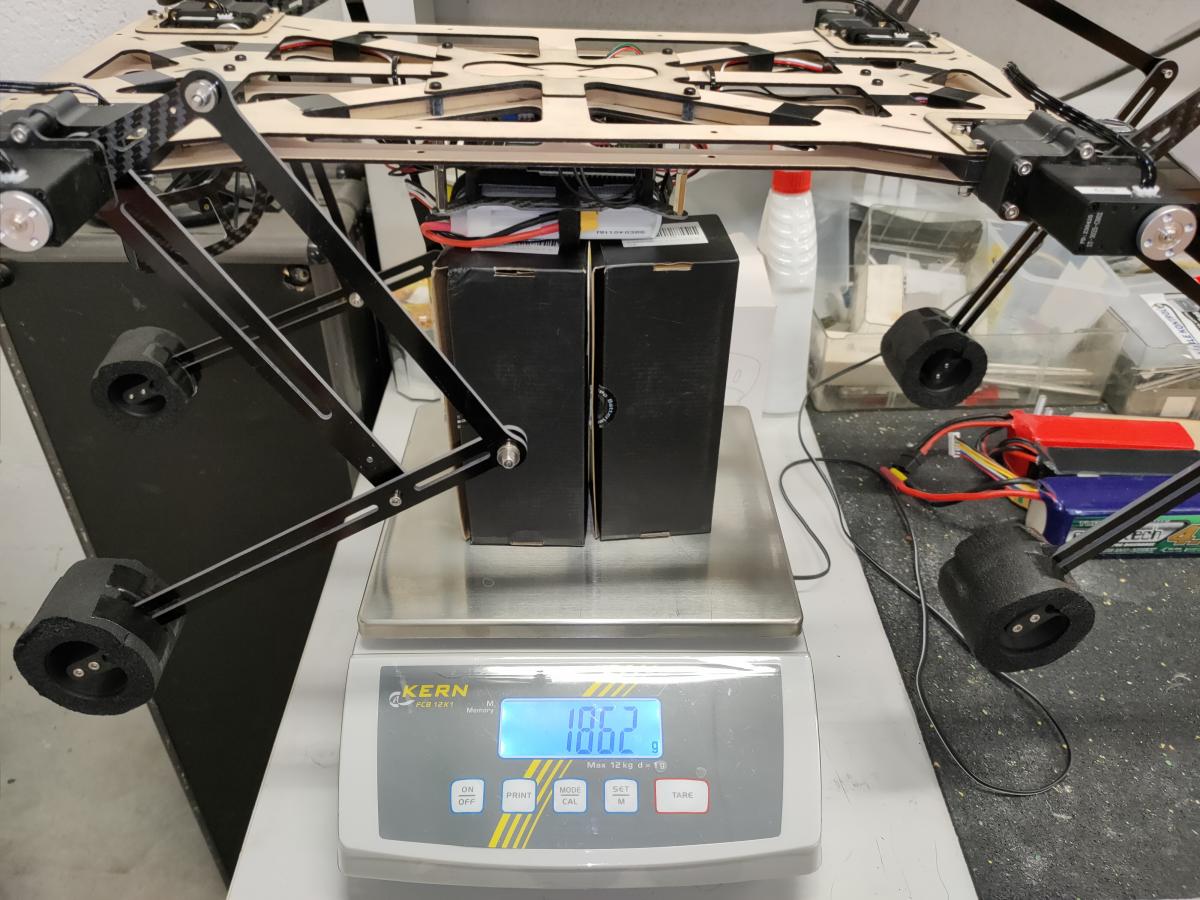
C'est dommage, je ne vais pas avoir le temps de réaliser un second prototype d'ici la TRR 2023. Je pense qu'on peut optimiser la masse du robot, tant au niveau de la structure du corps que des masses en mouvement. L'objectif serait de faire 1500g et ca me semble possible.
Je note pour plus tard :
- En CTP aviation de 2mm, la structure du châssis s'avère très rigide. Trop rigide ! Passer en CTP 1.5mm ou ajourer encore plus pour ne laisser que l'essentiel.
- Utiliser de la visserie nylon partout (M3 voire M2.5), sauf pour les articulations (Inox ou Titane M3)
- Utiliser des entretoises nylon autant que faire se peut.
- Lipo de 1A.h 30C doit suffire (-80g).
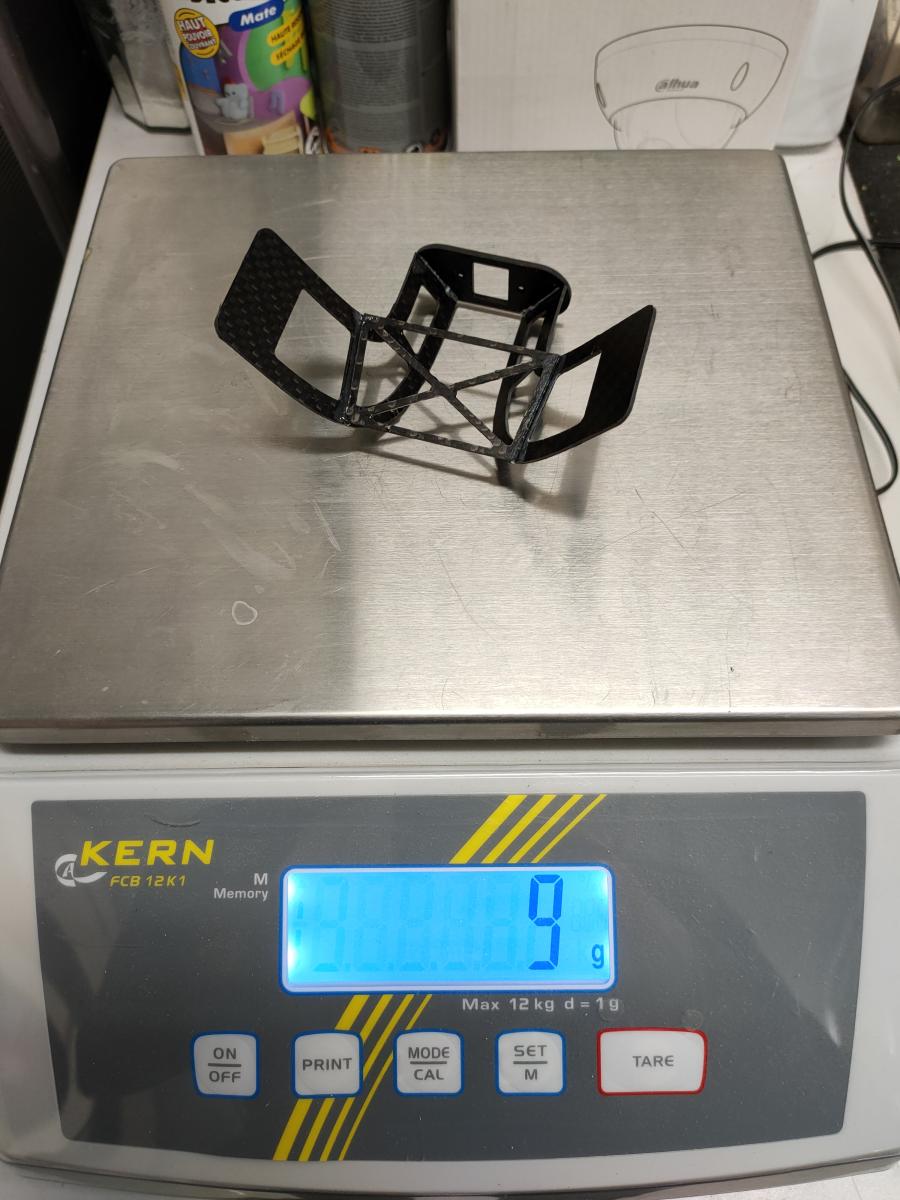
- Remplacer toutes les pièces en Epoxy, par du carbone de qualité et réduire les épaisseurs des jambes (2.5mm voire 2mm).








 Qu'est ce que tu as fais ? Qu'est ce qui ne marche pas ? Et quel est le contournement ?
Qu'est ce que tu as fais ? Qu'est ce qui ne marche pas ? Et quel est le contournement ?