Hi all!
Inspired by the successful Quadruped builds at TRR, I'm eager to try another build. From the posts that have been made recently, I've learned about the importance of stronger servos, better batteries, and lighter weight. In my previous builds, I encountered issues with weak servos and excessive robot weight.
For my next project, I'm seeking advice on the servo/distribution/battery aspects. For an 8 or 12 DoF robot, I will need a lot of servos, and suitable battery. Hopefully, I could find the magical affordable servos with a torque of 40kg/cm and a speed of 0.1 s / 60°!
Regarding the electrical requirements, I need help calculating the required current flow and determining the appropriate battery capacity (C value). Should I assume that the stall current multiplied by the number of servos represents the maximum requirement? Or is there a larger requirement due to the combined impulse of all the servos?
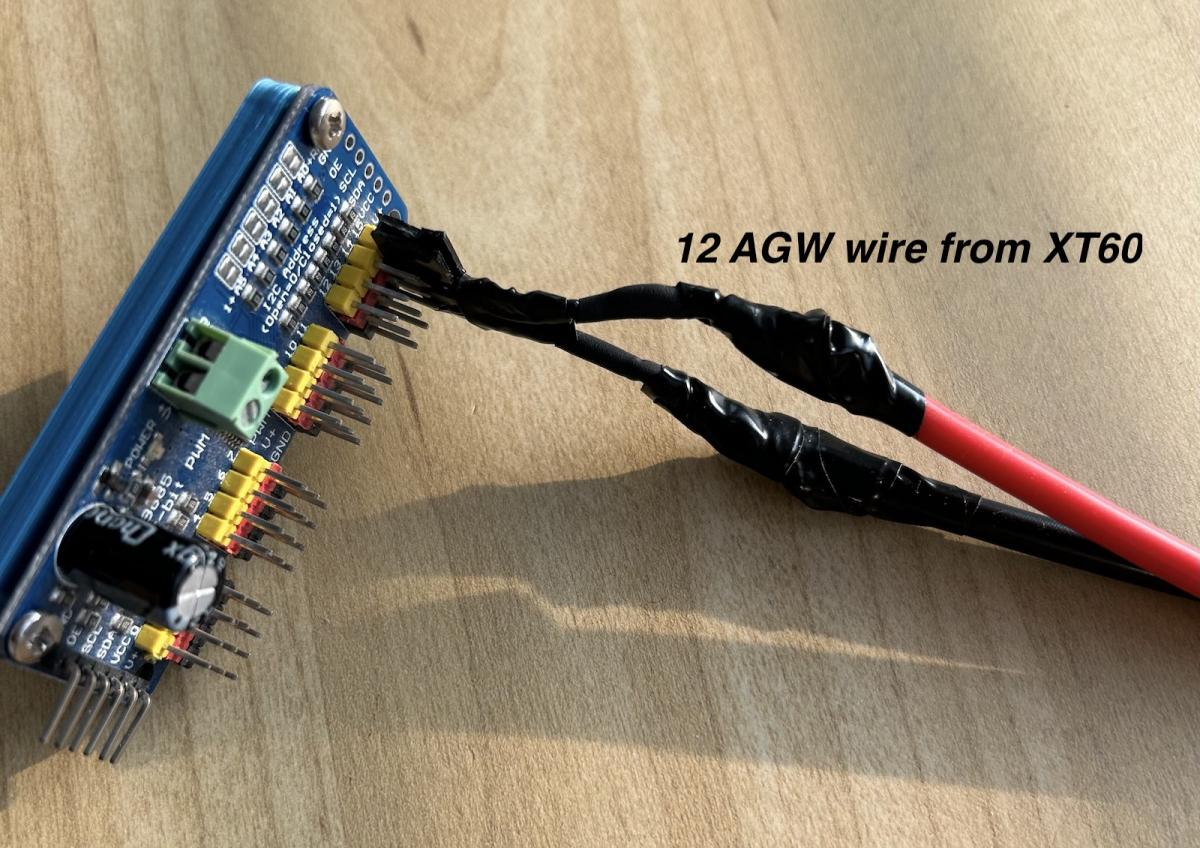
I'm also rethinking power distribution. Would a custom board be necessary, considering the possibility of expanding the design to a 12DoF configuration? This is obviously beyond the capabilities of a PCA9685.
Thanks!