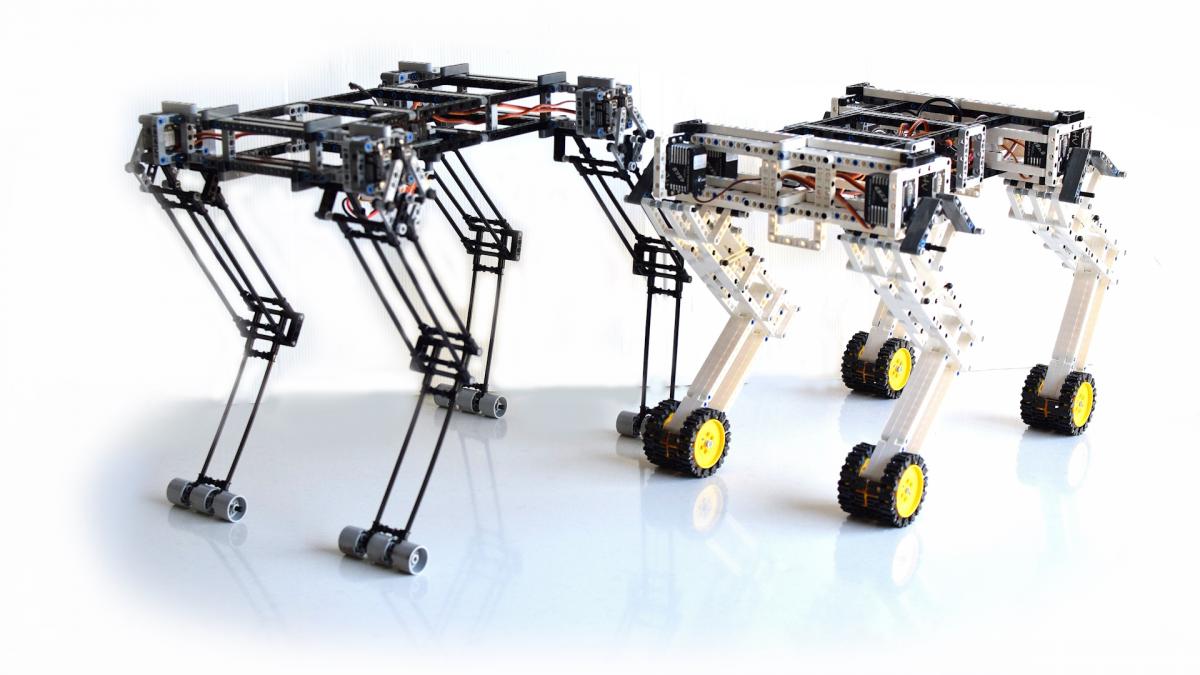
L'objectif de ce quadrupède est de faciliter la programmation des allures.
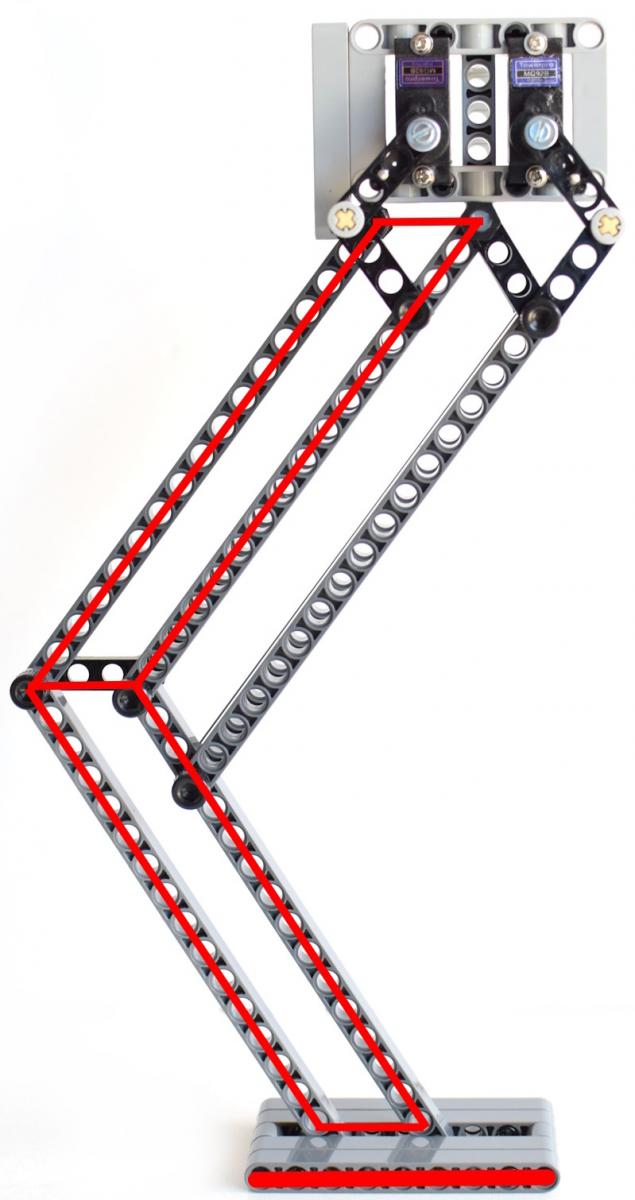
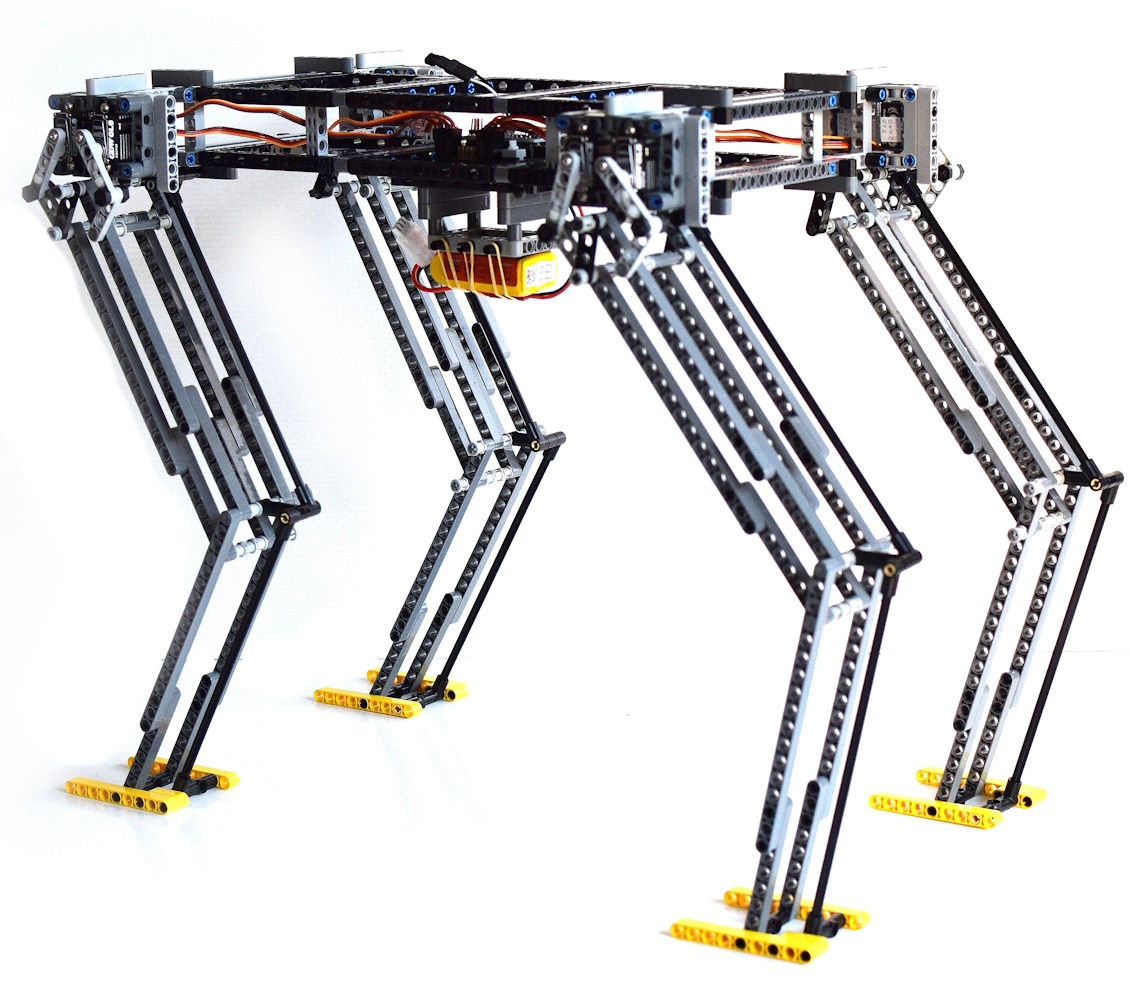
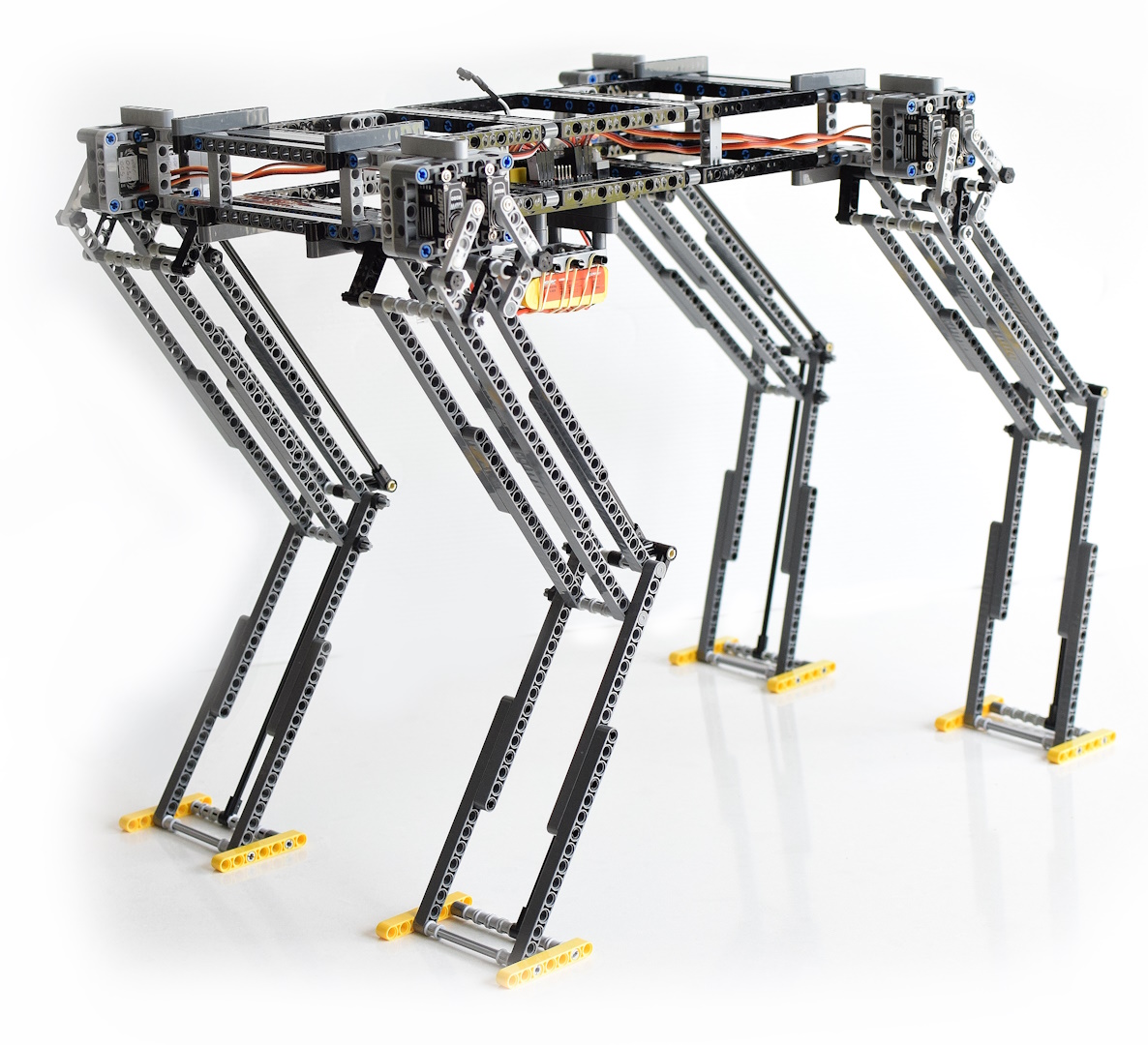
Pour cela, j'ai ajouté une semelle aux pattes. Cette semelle est maintenue parallèle au sol grâce à l'ajout de 2 parallélogrammes.
La surface de la semelle devrait permettre de faciliter le maintien du quadrupède sur 3 pattes et ainsi faciliter la programmation et la compréhension de l'allure.
Pour bien comprendre le problème, actuellement, lorsque je lève une patte, le quadrupède s'affaisse du coté de cette patte.
J'ai bien conscience que tout ceci relève du Centre de Gravité et donc de la relation entre la longueur et la largeur du quadrupède.
Comme vous pouvez vous en douter, depuis que je fais des quadrupèdes, j'ai essayé différentes variantes, mais malheureusement, sans succès.
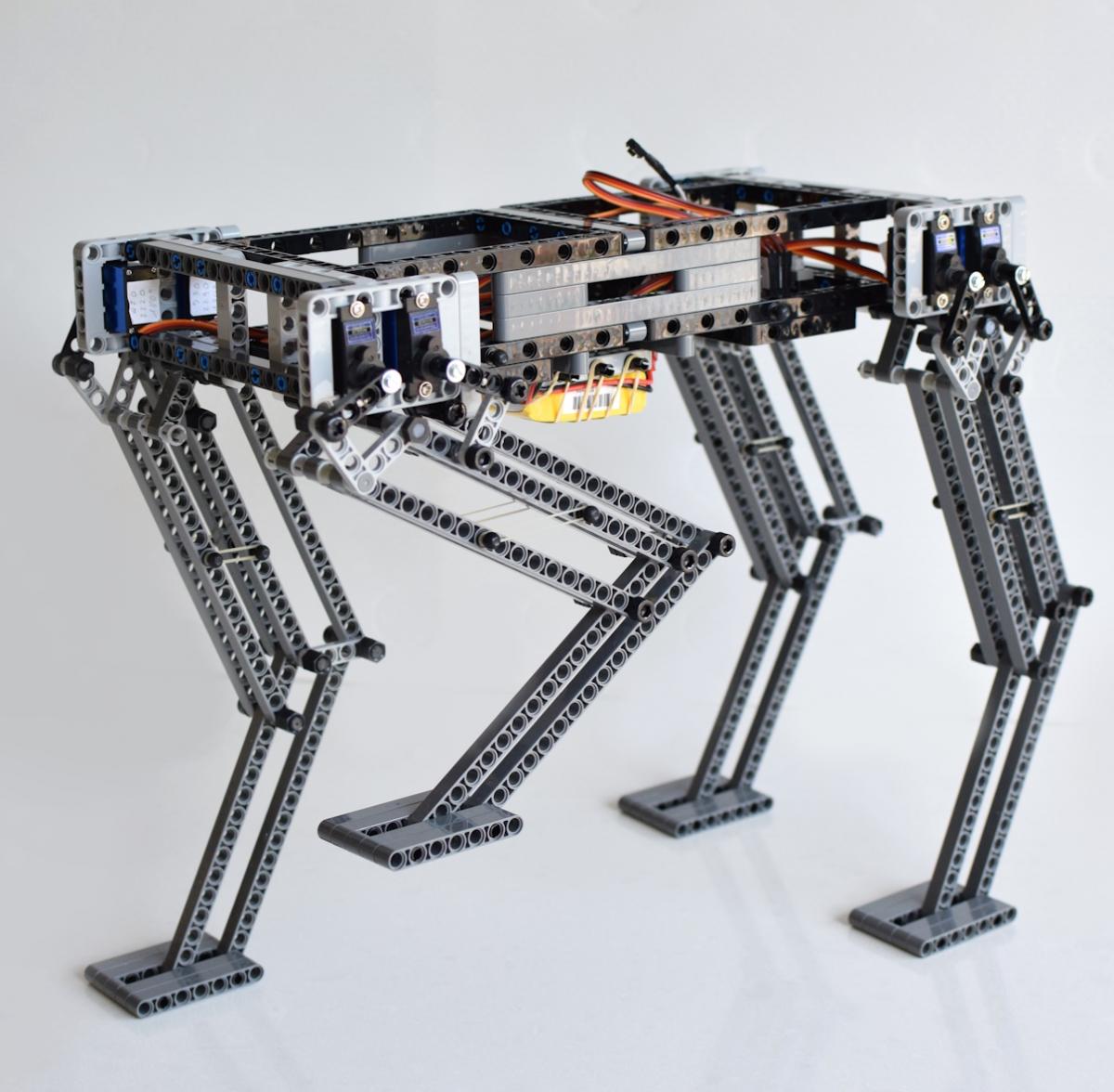
Dans cette version, vous remarquerez que j'ai utilisé de la visserie en nylon, en lieux et places des axes et pins Lego.
La rigidité de la patte, est ainsi, fortement renforcée.