Bonjour neo
tu confonds un peu je crois: un port c'est A, B, ou C, donc 3 ports sur un pic 16F84. Ensuite, tu as des pins (patte) enfin, tes E/S (entrées/sorties) là, je veux bien te croire que tu en as un peu plus... Mais tu devrais regarder de plus près si tu n'as pas encore finalisé ta carte électronique, voir si tu peux mettre un pic plus gros, genre 16F876, avec plus d'entrées sorties, ce sera plus pratique pour commander tes moteurs et surtout, il te faut des entrées libres pour les capteurs !!! si tu utilises tout pour contrôler tes pattes tu vas te retrouver bloqué pour installer des capteurs et donc réagir en fonction de l'environnement.
Bon, sinon pour ta question, j'ai jamais vu ça... si tu as telechargé le logiciel, trouve une autre source...dans tout les cas, le mieux c'est de désinstaller et réinstaller ton logiciel, vérifier les chemins de tout ce qui est lié a ton projet (même le compilateur), voir un peu si tu n'as pas renommé un dossier qui flinguerai quelque chose dans MPlab. Et pour finir, quand tu lances mplab, ne connecte pas tout de suite l'ICD2, des fois c'est lui qui amène des soucis (ça faisait ça a mon IUT...mais chez moi ça le fait pas...les phénomènes inexpliqués, 1 de plus).
Bon, je te souhaites bon courage !
@++

suivez la construction d'un quadropod
Débuté par Prinz metal ex-neo, févr. 20 2009 09:59
86 réponses à ce sujet
#21

JEF
-

- Membres
-

- 819 messages
Membre passionné
- Gender:Male
- Location:St Cannat (13)
Posté 16 mars 2009 - 06:42
Chaque jour est le premier du reste de ta vie.

#23
Prinz metal ex-neo
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 16 mars 2009 - 09:18
Bonsoir !
merci pour vos réponses
« JEF » je peux pas utilisé un 16F876 noublie pas je suis dAlgérien (relit le premier poste) tout ce que jai trouvé ici cest un 16f84 (y a pas de robotique ici tu trouvera le 16f84 parce que ya un trafique de flashage pour les récepteurs numérique lol on lutilise pour ça sinon nada) jai trouvé un moyen pour utilisé que 9 port et sa marche (jexpliquerai après comment jai fait cest un peux long) il me reste donc deux port, un pour la détection dobstacle normalement aprés, pour l'instant il faut qu'il se déplace!.
(relit le premier poste) tout ce que jai trouvé ici cest un 16f84 (y a pas de robotique ici tu trouvera le 16f84 parce que ya un trafique de flashage pour les récepteurs numérique lol on lutilise pour ça sinon nada) jai trouvé un moyen pour utilisé que 9 port et sa marche (jexpliquerai après comment jai fait cest un peux long) il me reste donc deux port, un pour la détection dobstacle normalement aprés, pour l'instant il faut qu'il se déplace!.
« gompaa » jai réglé le problème de mplab dune façon barbare sert lol mais sa marche, jai réinstallé le Windows, jétais obligé jai tout essai (installer réinstalle jai tout vérifier mais rien)
A+ neo
Bonne nuit et merci
merci pour vos réponses
« JEF » je peux pas utilisé un 16F876 noublie pas je suis dAlgérien
(relit le premier poste) tout ce que jai trouvé ici cest un 16f84 (y a pas de robotique ici tu trouvera le 16f84 parce que ya un trafique de flashage pour les récepteurs numérique lol on lutilise pour ça sinon nada) jai trouvé un moyen pour utilisé que 9 port et sa marche (jexpliquerai après comment jai fait cest un peux long) il me reste donc deux port, un pour la détection dobstacle normalement aprés, pour l'instant il faut qu'il se déplace!.« gompaa » jai réglé le problème de mplab dune façon barbare sert lol mais sa marche, jai réinstallé le Windows, jétais obligé jai tout essai (installer réinstalle jai tout vérifier mais rien)
A+ neo
Bonne nuit et merci
les pattes tiroir =>> THe Quadrupéde (en construction)
Suivez la naissance dIR bObOt
Léchec du Quadripode
Suivez la naissance dIR bObOt
Léchec du Quadripode
#24
Prinz metal ex-neo
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 16 mars 2009 - 09:26
Ah encore une question
Bon pourquoi je peux pas faire sa :??
Par exemple je veux envoyer un niveau 1 sur les ports 0,1,2,3
Je fais :
Movlw 0x0F ;pour b 00001111
Movfw PORTA ; la je dois avoir 0,1,2,3 état haut non ?
Mais daprès la simulation sa marche pas ! TRISA grade la valeur b"0000.0000"
Mais si je fais :
bsf porta,0
bsf porta,1
bsf porta,2
bsf porta,3
La.. TRISA a la valeur "0000 1111" normale la sa marche
Alors pour quoi sa marche pas avec la premier solution PORTA est un registre non ? Donc je peux lui envoyer une valeur ?!
(2 ligne c'est mieux que 4) !!
Re merci
Bon pourquoi je peux pas faire sa :??
Par exemple je veux envoyer un niveau 1 sur les ports 0,1,2,3
Je fais :
Movlw 0x0F ;pour b 00001111
Movfw PORTA ; la je dois avoir 0,1,2,3 état haut non ?
Mais daprès la simulation sa marche pas ! TRISA grade la valeur b"0000.0000"
Mais si je fais :
bsf porta,0
bsf porta,1
bsf porta,2
bsf porta,3
La.. TRISA a la valeur "0000 1111" normale la sa marche
Alors pour quoi sa marche pas avec la premier solution PORTA est un registre non ? Donc je peux lui envoyer une valeur ?!
(2 ligne c'est mieux que 4) !!
Re merci
les pattes tiroir =>> THe Quadrupéde (en construction)
Suivez la naissance dIR bObOt
Léchec du Quadripode
Suivez la naissance dIR bObOt
Léchec du Quadripode
#25
JEF
-
- Membres
-
- 819 messages
Membre passionné
- Gender:Male
- Location:St Cannat (13)
Posté 17 mars 2009 - 06:06
Salut,
T'es sur que tu t'es pas planter dans l'adresse des registres ? parce que si en envoyant la commande c'est TRISA qui bouge et pas PORTA, c'est que ta commande a l'air d'etre prit en compte, mais pas pour agir de la bonne maniere... regarde un peu tes adresses.
T'es sur que tu t'es pas planter dans l'adresse des registres ? parce que si en envoyant la commande c'est TRISA qui bouge et pas PORTA, c'est que ta commande a l'air d'etre prit en compte, mais pas pour agir de la bonne maniere... regarde un peu tes adresses.
Chaque jour est le premier du reste de ta vie.
#26
Prinz metal ex-neo
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 17 mars 2009 - 06:47
Salut,
T'es sur que tu t'es pas planter dans l'adresse des registres ? parce que si en envoyant la commande c'est TRISA qui bouge et pas PORTA, c'est que ta commande a l'air d'etre prit en compte, mais pas pour agir de la bonne maniere... regarde un peu tes adresses.
salut JEF
c'est bon ! j'ai réglé le probleme y a quelques heurs, j'ai oublié de changé de banque c'est con

et je confondais entre « TRISA » est « PORTA »

merci
les pattes tiroir =>> THe Quadrupéde (en construction)
Suivez la naissance dIR bObOt
Léchec du Quadripode
Suivez la naissance dIR bObOt
Léchec du Quadripode
#27
Prinz metal ex-neo
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 18 mars 2009 - 04:21
re !
j'ai une petite question
mes moteurs fonctionent normalement sous 3v moi je leur fait subir 4v
vont-ils grillé avec le temps ?? (ils reposent par fois ils ne roulent pas en continue)
(ils reposent par fois ils ne roulent pas en continue)
????
j'ai une petite question
mes moteurs fonctionent normalement sous 3v moi je leur fait subir 4v
vont-ils grillé avec le temps ??
(ils reposent par fois ils ne roulent pas en continue)????
les pattes tiroir =>> THe Quadrupéde (en construction)
Suivez la naissance dIR bObOt
Léchec du Quadripode
Suivez la naissance dIR bObOt
Léchec du Quadripode
#28
JEF
-
- Membres
-
- 819 messages
Membre passionné
- Gender:Male
- Location:St Cannat (13)
Posté 18 mars 2009 - 08:03
Salut Neo
ça tu vois, c'est EXACTEMENT le genre de question a laquelle on ne peux pas repondre:
Il marche sur 3v tu dis...parce que tu les a trouver dans un montage marchant en 3v ?
ils ont tous une plage de fonctionnement... donc impossible de te repondre, il n'y a que toi qui peux trouver la reponse en cherchant la doc technique de ton moteur.
Au pif, je dirais que deja, tend l'oreille, si il est vraiment survolté tu dois l'entendre, le sentir... mais souvent les petits moteurs tournent jusqu'a 4,5v...3v en tension max ça fait pas beaucoup... et puis si tu veux en etre sur, tu le charge un peu et tu le laisse tourné une journée...tu seras vite fixé !
Bonne journée
ça tu vois, c'est EXACTEMENT le genre de question a laquelle on ne peux pas repondre:
Il marche sur 3v tu dis...parce que tu les a trouver dans un montage marchant en 3v ?
ils ont tous une plage de fonctionnement... donc impossible de te repondre, il n'y a que toi qui peux trouver la reponse en cherchant la doc technique de ton moteur.
Au pif, je dirais que deja, tend l'oreille, si il est vraiment survolté tu dois l'entendre, le sentir... mais souvent les petits moteurs tournent jusqu'a 4,5v...3v en tension max ça fait pas beaucoup... et puis si tu veux en etre sur, tu le charge un peu et tu le laisse tourné une journée...tu seras vite fixé !
Bonne journée
Chaque jour est le premier du reste de ta vie.
#29
Prinz metal ex-neo
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 20 mars 2009 - 06:48
Salut JEF merci pour ta réponseça tu vois, c'est EXACTEMENT le genre de question a laquelle on ne peux pas repondre:
Il marche sur 3v tu dis...parce que tu les a trouver dans un montage marchant en 3v ?
ils ont tous une plage de fonctionnement... donc impossible de te repondre, il n'y a que toi qui peux trouver la reponse en cherchant la doc technique de ton moteur.

….je m’attendais a ca

En appliquant 4v le bruit ne me plait pas trop c’est genre: à 3v: vnnnnnn, a 4v: vnnniiihaaaaaaaaAu pif, je dirais que déjà, tend l'oreille, si il est vraiment survolté tu dois l'entendre, le sentir...
ca me plait pas trop je préfère les 3v a vnnnnnn lol 
Sinon aujourd’hui c’est le premier jour des vacances ! J’ai 15 jours a consacré a la bébête
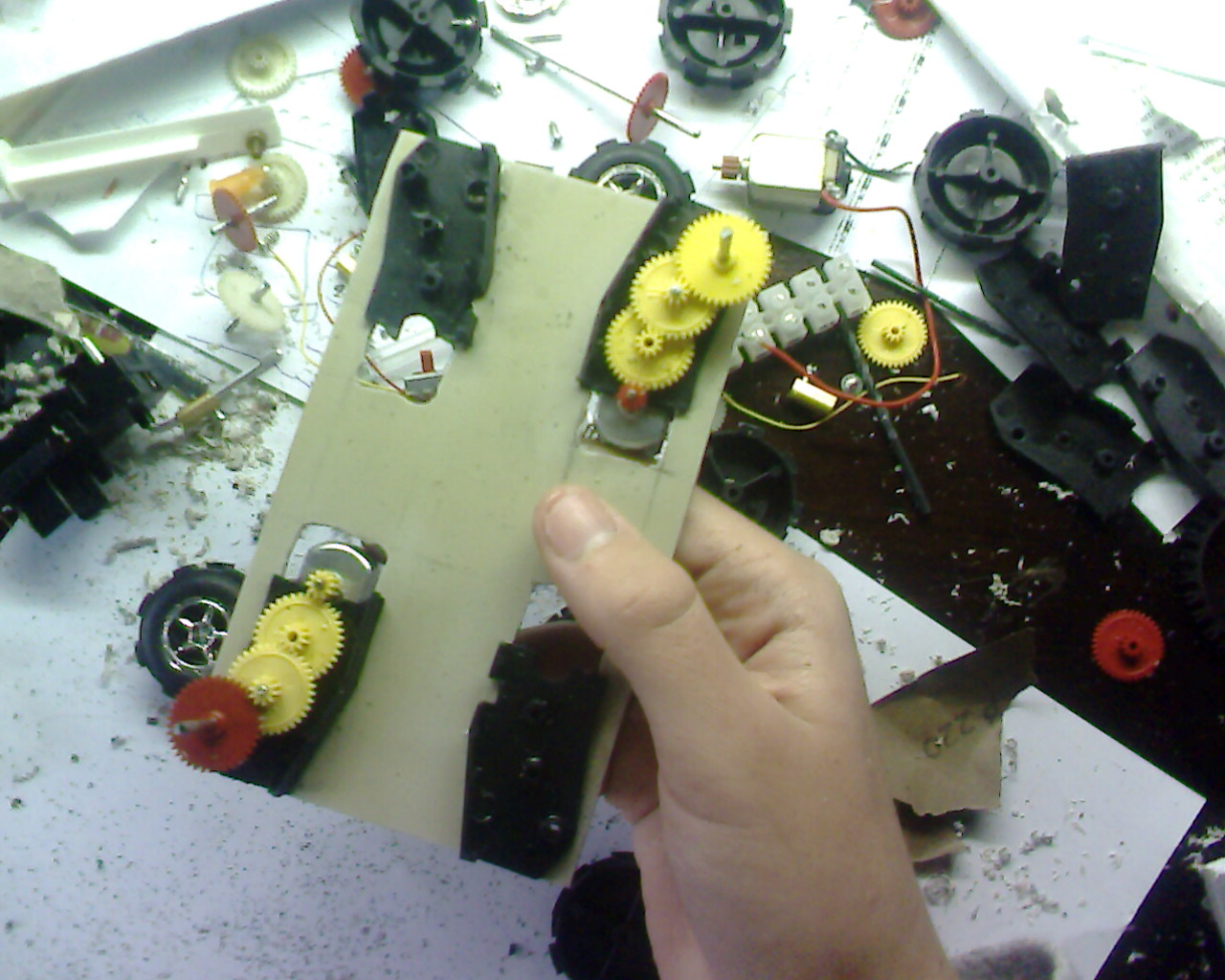
 , enfin !, et pour cette premier journée…. De gros CHANGEMENTS au niveau des pattes, maintenant il a un nouveau LOOK
, enfin !, et pour cette premier journée…. De gros CHANGEMENTS au niveau des pattes, maintenant il a un nouveau LOOK 
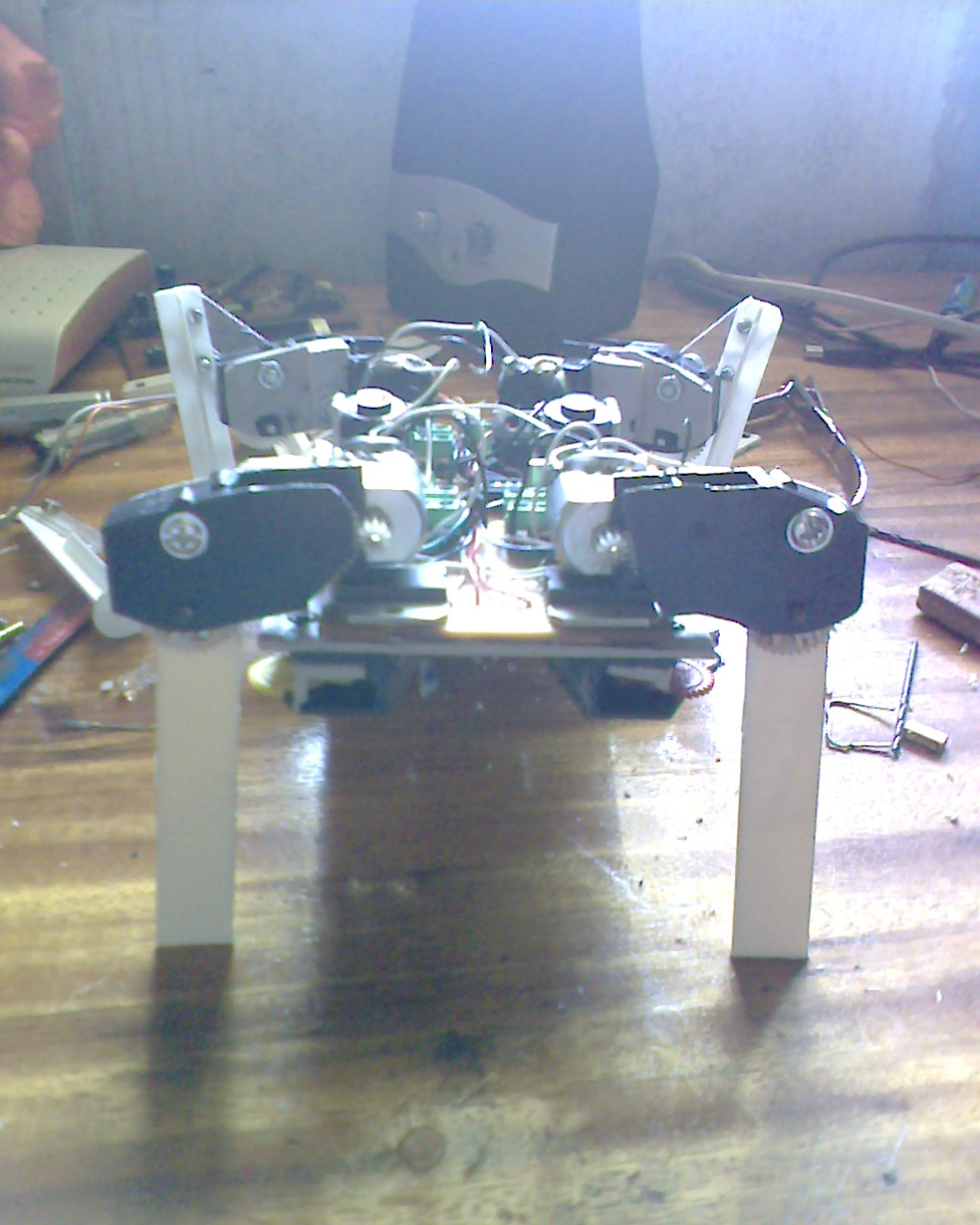

Les pattes arrière sont aussi modifier j’ai juste prit les photos avant la modif pour voir la différence
Position assis
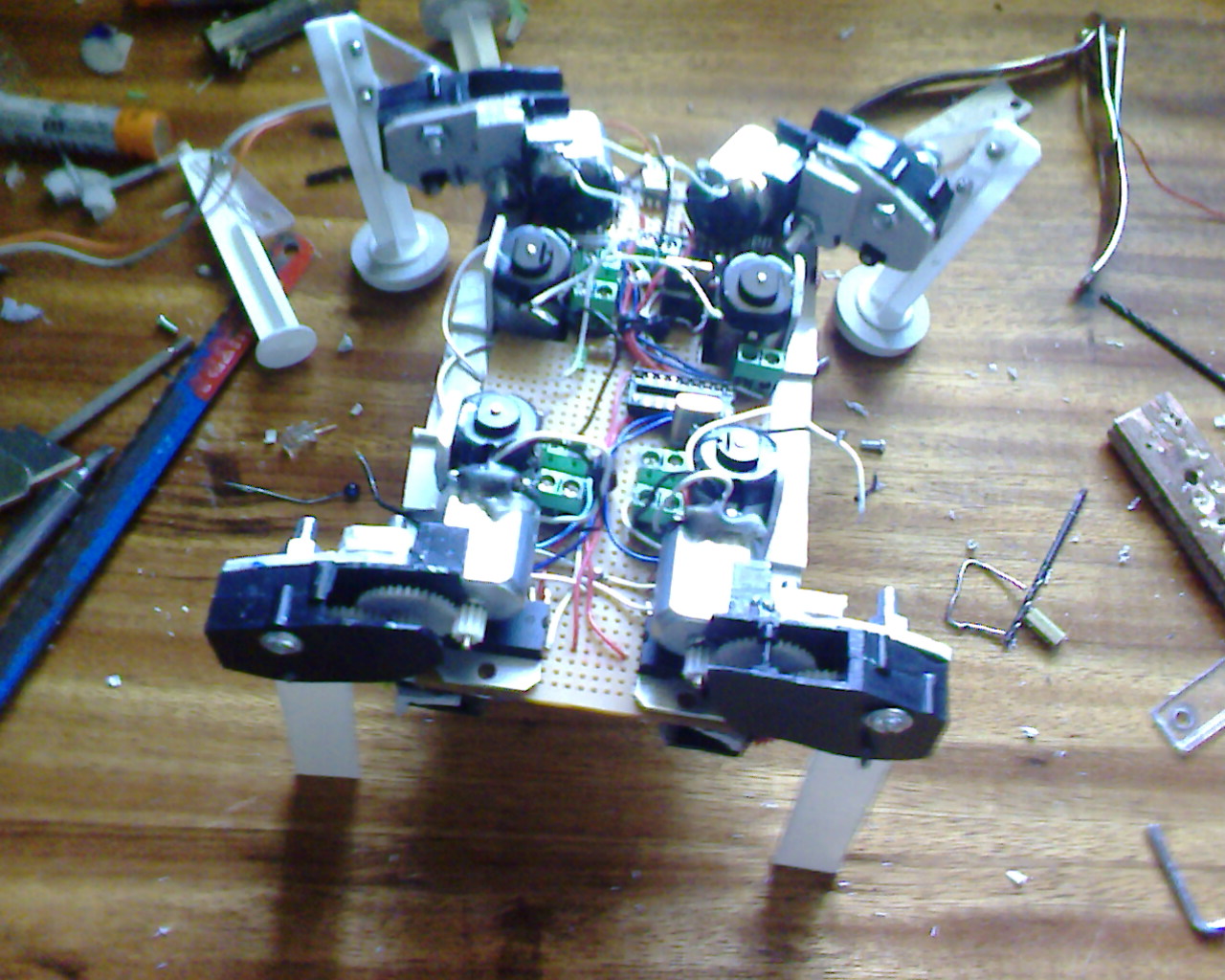
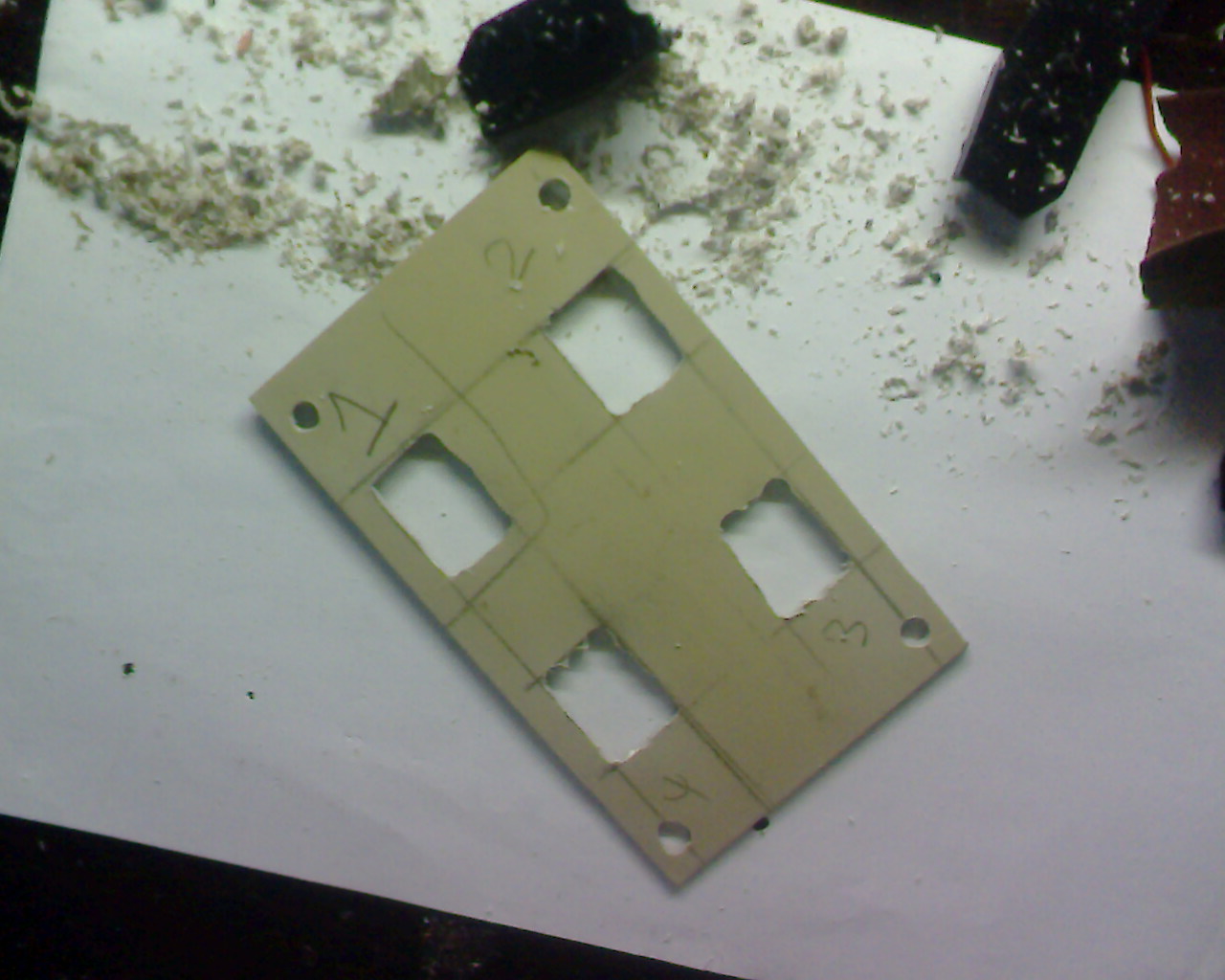
bon la cause de tout ses changements c’est sa ! :

Avec le temps l’axe ne se tien plus dans le Pinion et en gros tout les pattes étais fragile
donc la solution c’est étais de fixé la patte directement sur le pinion avec des petits boulons comme sa ca rigole plus !

en plus après les essais que j’ai fait avec les ancienne pattes le robot étais beaucoup moins stable que maintenant, c’est beaucoup mieux avec ses patte, je regrette quand même sans ancien look il étais un peut plus agressive ! maintenant les pattes me font plus poncer a un robot d’un manga japonais je sais pas pourquoi
mais sa me plait encore quand méme sinon j'aurais tout balancé par la fentére lolVoila le billon de cette journée des commentaires !?
les pattes tiroir =>> THe Quadrupéde (en construction)
Suivez la naissance dIR bObOt
Léchec du Quadripode
Suivez la naissance dIR bObOt
Léchec du Quadripode
#30
Jan
-

- Membres
-
- 4â¯747 messages
Webmaster
- Gender:Male
- Location:Rhône Alpes
Posté 20 mars 2009 - 11:06
Toujours bien génial ton robot !
Ce qui est cool c'est que tu décris vraiment tes avancés avec des photos, etc...
Moi j'ai toujours hate de le voir marcher, j'espère qu'avec les vacances tu vas pouvoir lui donner vie...
Tu compte mettre le circuit à disposition de tous par la suite ? Ca pourrait en intéresser + d'un !
Je suis certain que beaucoup voudraient faire le même robot ou dans le même style.
Ce qui est cool c'est que tu décris vraiment tes avancés avec des photos, etc...
Moi j'ai toujours hate de le voir marcher, j'espère qu'avec les vacances tu vas pouvoir lui donner vie...
Tu compte mettre le circuit à disposition de tous par la suite ? Ca pourrait en intéresser + d'un !
Je suis certain que beaucoup voudraient faire le même robot ou dans le même style.
#31
Prinz metal ex-neo
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 20 mars 2009 - 11:20
Merci Bernard ! Tu m’encourage ! 
Théoriquement il va marcher dans peut de temps, mais on sait jamais avec les IMPREVUS je préfère ne pas dire le mot B-I-E-N-T-O-T ! Je vous jure ça porte la poisse!! lol je ne blague pas
Je vous jure ça porte la poisse!! lol je ne blague pas
Théoriquement il va marcher dans peut de temps, mais on sait jamais avec les IMPREVUS je préfère ne pas dire le mot B-I-E-N-T-O-T !
Je vous jure ça porte la poisse!! lol je ne blague pas Certainement ! Pour quoi pasTu compte mettre le circuit à disposition de tous par la suite ? Ca pourrait en intéresser + d'un !
les pattes tiroir =>> THe Quadrupéde (en construction)
Suivez la naissance dIR bObOt
Léchec du Quadripode
Suivez la naissance dIR bObOt
Léchec du Quadripode
#32
JEF
-
- Membres
-
- 819 messages
Membre passionné
- Gender:Male
- Location:St Cannat (13)
Posté 22 mars 2009 - 07:17
Salut Neo
Je rejoint Mr Webmaster, C'est vraiment sympa de prendre des photos a chaque etape. On se dit tous qu'on va le faire, et au final on a la flemme. Toi tu le fais, et on en profite pleinement !
Pour le moteur... Cherche si il n'y a pas des inscritpions dessus. Sa reference pourrait nous servir a trouver la reponse. Sinon, si tu en a encore 1 ou 2 en stock qui sont identique, tu peux faire le test un peu barbare: tu le branche en 4v pendant 1j ou 2, et tu vois si il chauffe, si il crame. Si c'est pas le cas, si il tient 1 ou 2j, il tiendra a vie certainement. Car un survoltage, on s'en rend vite compte.
Sinon, pour ce qui est de l'esthetique, bizzarement, je prefere la nouvelle version !
Bonne continuation
Je rejoint Mr Webmaster, C'est vraiment sympa de prendre des photos a chaque etape. On se dit tous qu'on va le faire, et au final on a la flemme. Toi tu le fais, et on en profite pleinement !
Pour le moteur... Cherche si il n'y a pas des inscritpions dessus. Sa reference pourrait nous servir a trouver la reponse. Sinon, si tu en a encore 1 ou 2 en stock qui sont identique, tu peux faire le test un peu barbare: tu le branche en 4v pendant 1j ou 2, et tu vois si il chauffe, si il crame. Si c'est pas le cas, si il tient 1 ou 2j, il tiendra a vie certainement. Car un survoltage, on s'en rend vite compte.
Sinon, pour ce qui est de l'esthetique, bizzarement, je prefere la nouvelle version !
Bonne continuation
Chaque jour est le premier du reste de ta vie.
#33
Prinz metal ex-neo
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 22 mars 2009 - 09:57
salut !
Beh… fallait le dire !
tout à commencé par la déstruction et "Le Sacrifice des 8 Jouettes" démonté sauvagement !!!
deux jouettes seulment on participé au casting les six autre étais déjas bousillé

Une blessure de guerre, Le coupable à gauche!


Bon la comme je l est dit les pattes ne sont plus comme ça

c'est ce axe la à gauche dans le pinion qui commencé a tourné librement dans le pinion avec le temps (Je me demande comment on peux fixe ces axes solidement dans les servomoteurs... ??)
 Finalement je ne vais pas risqué et puis de tout façon j’ai abandonné l’idée du soulèvement, le robot ne vas pas ce soulevé alors 3v sufi (peff.. je suis très déçu
Finalement je ne vais pas risqué et puis de tout façon j’ai abandonné l’idée du soulèvement, le robot ne vas pas ce soulevé alors 3v sufi (peff.. je suis très déçu  ) parce que avec le poids des batteries en plus! les moteur n’ont pas assai de force! (bah oui c’est pas des servomoteurs) donc c’est ce qui justifie le nouveau look avec l'ancien look qu’on on vois le robot on ce dit qu’il vas marché rapidement et sauté par tout mais après les essai il ce soulève assai difficilement et si les batteries sont un tout petit peut déchargé il reste sur place! Donc les nouvelles pattes ressemble plus a son déplacement.
) parce que avec le poids des batteries en plus! les moteur n’ont pas assai de force! (bah oui c’est pas des servomoteurs) donc c’est ce qui justifie le nouveau look avec l'ancien look qu’on on vois le robot on ce dit qu’il vas marché rapidement et sauté par tout mais après les essai il ce soulève assai difficilement et si les batteries sont un tout petit peut déchargé il reste sur place! Donc les nouvelles pattes ressemble plus a son déplacement.
Mais je le ferais un jour ce robot et il va ce soulevé! Déjà si on compare le premier hexapode avec celui la ya une sacré différence! Alors pourquoi pas un 3éme !!
a+ neo
Salut Neo
Je rejoint Mr Webmaster, C'est vraiment sympa de prendre des photos a chaque etape. On se dit tous qu'on va le faire, et au final on a la flemme. Toi tu le fais, et on en profite pleinement !
Beh… fallait le dire
!tout à commencé par la déstruction et "Le Sacrifice des 8 Jouettes" démonté sauvagement !!!
deux jouettes seulment on participé au casting les six autre étais déjas bousillé
Une blessure de guerre, Le coupable à gauche!
Bon la comme je l est dit les pattes ne sont plus comme ça
c'est ce axe la à gauche dans le pinion qui commencé a tourné librement dans le pinion avec le temps (Je me demande comment on peux fixe ces axes solidement dans les servomoteurs... ??)
Heu… y a pas de référence sur les moteurs comme c’est des moteurs de jouette super pas chère (bh oui j’ai en acheté 8 ) donc des moteurs vraiment simple et fragilePour le moteur... Cherche si il n'y a pas des inscritpions dessus. Sa reference pourrait nous servir a trouver la reponse. Sinon, si tu en a encore 1 ou 2 en stock qui sont identique, tu peux faire le test un peu barbare: tu le branche en 4v pendant 1j ou 2, et tu vois si il chauffe, si il crame. Si c'est pas le cas, si il tient 1 ou 2j, il tiendra a vie certainement. Car un survoltage, on s'en rend vite compte.
Finalement je ne vais pas risqué et puis de tout façon j’ai abandonné l’idée du soulèvement, le robot ne vas pas ce soulevé alors 3v sufi (peff.. je suis très déçu ) parce que avec le poids des batteries en plus! les moteur n’ont pas assai de force! (bah oui c’est pas des servomoteurs) donc c’est ce qui justifie le nouveau look avec l'ancien look qu’on on vois le robot on ce dit qu’il vas marché rapidement et sauté par tout mais après les essai il ce soulève assai difficilement et si les batteries sont un tout petit peut déchargé il reste sur place! Donc les nouvelles pattes ressemble plus a son déplacement.Mais je le ferais un jour ce robot et il va ce soulevé!
Déjà si on compare le premier hexapode avec celui la ya une sacré différence! Alors pourquoi pas un 3éme !! a+ neo
les pattes tiroir =>> THe Quadrupéde (en construction)
Suivez la naissance dIR bObOt
Léchec du Quadripode
Suivez la naissance dIR bObOt
Léchec du Quadripode
#34
Prinz metal ex-neo
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 23 mars 2009 - 06:39
salut !
bon Hier:
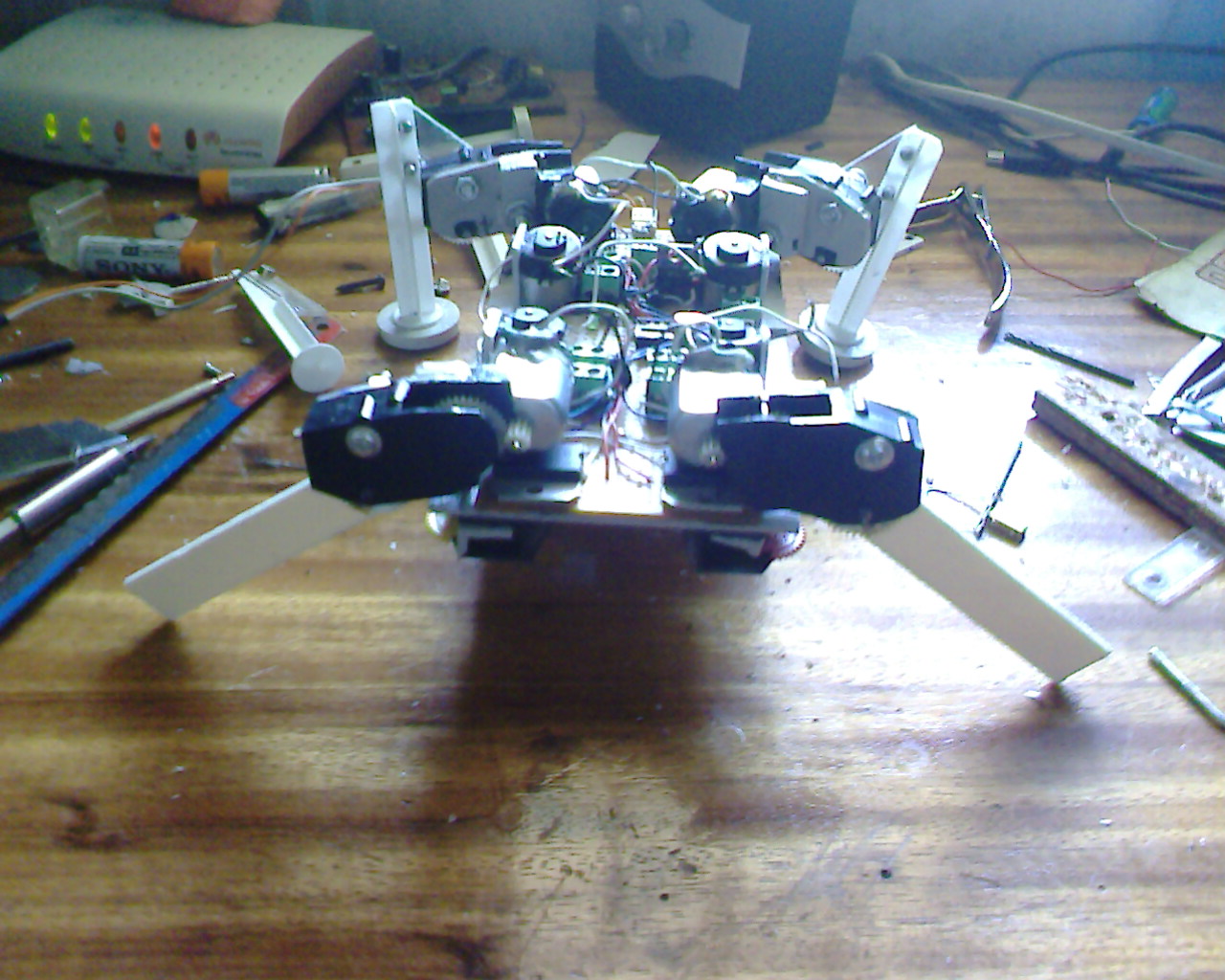
les pattes sont plus esthétique!

Aujourd’hui:
Le premier petit pas!
la NORMALEMENT (on sais jamais avec les imprévus) le robot est prêt à recevoir le programme !!
sans dire le mots maudit Bi…t..t
"webmaster Bernard merci pour les nouveaux émoticônes, j'adore !!"
a+ neo
bon Hier:
les pattes sont plus esthétique!
Aujourd’hui:
Le premier petit pas!
la NORMALEMENT (on sais jamais avec les imprévus) le robot est prêt à recevoir le programme !!
sans dire le mots maudit Bi…t..t
"webmaster Bernard merci pour les nouveaux émoticônes, j'adore !!"
a+ neo
les pattes tiroir =>> THe Quadrupéde (en construction)
Suivez la naissance dIR bObOt
Léchec du Quadripode
Suivez la naissance dIR bObOt
Léchec du Quadripode
#35
Prinz metal ex-neo
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 25 mars 2009 - 05:22
Bonsoir tout le monde 
La en ce moment même je le/la (je sais pas) programme…. il/elle marchera aujourd’hui !
Et voila que le « IMPREVUS » ce manifeste….
Quelqu’un peux m’expliquer pourquoi mon PIC ne suit pas mon programme ??.
Et pourquoi il fait a chaque fois une chose différent de la précédent?...
j'explique:
Si par exemple mon PIC doit actionner l’un des 8 moteurs il l’actionneur, mais lors de la prochaine mise en tension il actionnera un autre moteur! (a chaque mise en tension il fait une chose différent de la précédent !) pourquoi ??
voila..
"
LIST p=16F84
#include <p16F84.inc>
__CONFIG _CP_OFF & _WDT_OFF & _PWRTE_ON & _HS_OSC
---- definition ------------------------------
#DEFINE commune PORTB,3
#DEFINE CpatteA PORTA,0
#DEFINE patteA PORTB,4
#DEFINE CpatteB PORTB,2
#DEFINE patteB PORTA,1
#DEFINE CpatteC PORTA,2
#DEFINE patteC PORTB,1
#DEFINE CpatteD PORTB,0
#DEFINE patteD PORTA,3
;---- déclaration des variables ---------------
CBLOCK 0x00c
cmpt1 : 1
cmpt2 : 1
cmpt3 : 1
ENDC
org 0x000
goto init
;---- initialisations -------------------------
init
clrf PORTB
clrf PORTA
clrf EEADR
bsf STATUS,RP0
clrf TRISA
clrf TRISB
movlw 0x088
movwf OPTION_REG
;---- Effacer RAM -----------------------------
movlw 0x0c
movwf FSR
init1
clrf INDF
incf FSR,f
btfss FSR,6
goto init1
btfss FSR,4
goto init1
bcf STATUS,RP0
goto start
;---- boucle ----------------------------------
;de 0.5 sec soit 500.000 µs
;----------------------------------------------
tempo
movlw 2
movwf cmpt3
boucle3
clrf cmpt2
boucle2
clrf cmpt1
boucle1
nop
decfsz cmpt1 , f
goto boucle1
decfsz cmpt2
goto boucle2
decfsz cmpt3
goto boucle3
return
;----------------------------------------------
start
; marche !!!!
;commune état 0
;A
movlw 0x10
movwf PORTB
movlw 0x1
movwf PORTA
call tempo
movlw 0xEF
movwf PORTB
movlw 0xF
movwf PORTA
call tempo
teste
clrf PORTA
clrf PORTB
goto teste"
Ne fait pas trop attention.. je sais ce programme ne fera pas marché ma bestiole c'e[/b]st n'est qu'un teste
merci de m'aidé c'est un peux urgent.
La en ce moment même je le/la (je sais pas)
programme…. il/elle marchera aujourd’hui ! Et voila que le « IMPREVUS » ce manifeste….
Quelqu’un peux m’expliquer pourquoi mon PIC ne suit pas mon programme ??.
Et pourquoi il fait a chaque fois une chose différent de la précédent?...
j'explique:
Si par exemple mon PIC doit actionner l’un des 8 moteurs il l’actionneur, mais lors de la prochaine mise en tension il actionnera un autre moteur! (a chaque mise en tension il fait une chose différent de la précédent !) pourquoi ??
voila..
"
LIST p=16F84
#include <p16F84.inc>
__CONFIG _CP_OFF & _WDT_OFF & _PWRTE_ON & _HS_OSC
---- definition ------------------------------
#DEFINE commune PORTB,3
#DEFINE CpatteA PORTA,0
#DEFINE patteA PORTB,4
#DEFINE CpatteB PORTB,2
#DEFINE patteB PORTA,1
#DEFINE CpatteC PORTA,2
#DEFINE patteC PORTB,1
#DEFINE CpatteD PORTB,0
#DEFINE patteD PORTA,3
;---- déclaration des variables ---------------
CBLOCK 0x00c
cmpt1 : 1
cmpt2 : 1
cmpt3 : 1
ENDC
org 0x000
goto init
;---- initialisations -------------------------
init
clrf PORTB
clrf PORTA
clrf EEADR
bsf STATUS,RP0
clrf TRISA
clrf TRISB
movlw 0x088
movwf OPTION_REG
;---- Effacer RAM -----------------------------
movlw 0x0c
movwf FSR
init1
clrf INDF
incf FSR,f
btfss FSR,6
goto init1
btfss FSR,4
goto init1
bcf STATUS,RP0
goto start
;---- boucle ----------------------------------
;de 0.5 sec soit 500.000 µs
;----------------------------------------------
tempo
movlw 2
movwf cmpt3
boucle3
clrf cmpt2
boucle2
clrf cmpt1
boucle1
nop
decfsz cmpt1 , f
goto boucle1
decfsz cmpt2
goto boucle2
decfsz cmpt3
goto boucle3
return
;----------------------------------------------
start
; marche !!!!
;commune état 0
;A
movlw 0x10
movwf PORTB
movlw 0x1
movwf PORTA
call tempo
movlw 0xEF
movwf PORTB
movlw 0xF
movwf PORTA
call tempo
teste
clrf PORTA
clrf PORTB
goto teste"
Ne fait pas trop attention.. je sais ce programme ne fera pas marché ma bestiole c'e[/b]st n'est qu'un teste
merci de m'aidé c'est un peux urgent.
les pattes tiroir =>> THe Quadrupéde (en construction)
Suivez la naissance dIR bObOt
Léchec du Quadripode
Suivez la naissance dIR bObOt
Léchec du Quadripode
#36
Prinz metal ex-neo
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 26 mars 2009 - 09:21
Salut tout le monde !
Voila en ce moment même j’ai un gros problème partie mécanique! (Pour la programmation j’ai réglé le problème en haut) Je ponce trouvé la solution j’expliquerai tout après la je suis sous une énorme pression le robot pourra ne jamais marcher ! (les mecs vous suivez la une vrais construction de robot en direct avec ses hauts et ses bas !) du délire !!!
le robot marchera un jours ?!!?
Alors souhaité moi bonne chance, merci
A+ neo (ne jamais lâché!)
Voila en ce moment même j’ai un gros problème partie mécanique! (Pour la programmation j’ai réglé le problème en haut) Je ponce trouvé la solution j’expliquerai tout après la je suis sous une énorme pression le robot pourra ne jamais marcher ! (les mecs vous suivez la une vrais construction de robot en direct avec ses hauts et ses bas !) du délire !!!
le robot marchera un jours ?!!?
Alors souhaité moi bonne chance, merci
A+ neo (ne jamais lâché!)
les pattes tiroir =>> THe Quadrupéde (en construction)
Suivez la naissance dIR bObOt
Léchec du Quadripode
Suivez la naissance dIR bObOt
Léchec du Quadripode
#38
JEF
-
- Membres
-
- 819 messages
Membre passionné
- Gender:Male
- Location:St Cannat (13)
Posté 27 mars 2009 - 07:56
Hello Neo !
Je viens juste de revenir sur le forum... visiblement, mon retard t'a etait benefique vu que tu as trouver tout seul...d'autant plus de merite!
Pour la programmation, bizarement, lorsque ça ressemble pas a mon architecture habituelle de programme, j'ai beaucoup de mal a regler le probleme des autres... heureusement que tu as trouver tout seul au dessus parce que j'aurai etais incapable de te filé un coup de main.
Sinon, pour ton hexapode qui marche pas...bah, pas grave ! Me souviens une fois, Bernard avait fait un robot roulant qui tourné pas ! bon, certe il avait de la geule le robot, 4 roues motrices, hyper solide (on pouvait monté dessus!) et rapide en ligne droite...mais incapable de tourné...comme quoi, il y a pire !!!
Bonne chance pour la suite ! et n'oublie pas les
Je viens juste de revenir sur le forum... visiblement, mon retard t'a etait benefique vu que tu as trouver tout seul...d'autant plus de merite!
Pour la programmation, bizarement, lorsque ça ressemble pas a mon architecture habituelle de programme, j'ai beaucoup de mal a regler le probleme des autres... heureusement que tu as trouver tout seul au dessus parce que j'aurai etais incapable de te filé un coup de main.
Sinon, pour ton hexapode qui marche pas...bah, pas grave ! Me souviens une fois, Bernard avait fait un robot roulant qui tourné pas ! bon, certe il avait de la geule le robot, 4 roues motrices, hyper solide (on pouvait monté dessus!) et rapide en ligne droite...mais incapable de tourné...comme quoi, il y a pire !!!
Bonne chance pour la suite ! et n'oublie pas les
Chaque jour est le premier du reste de ta vie.
#39
Jan
-
- Membres
-
- 4â¯747 messages
Webmaster
- Gender:Male
- Location:Rhône Alpes
Posté 27 mars 2009 - 08:01
Me souviens une fois, Bernard avait fait un robot roulant qui tourné pas ! bon, certe il avait de la geule le robot, 4 roues motrices, hyper solide (on pouvait monté dessus!) et rapide en ligne droite...mais incapable de tourné...comme quoi, il y a pire !!!
...
Ce ne serait pas plutôt ton robot ? Gaffe je ressort la vidéo
...
#40
JEF
-
- Membres
-
- 819 messages
Membre passionné
- Gender:Male
- Location:St Cannat (13)
Posté 27 mars 2009 - 08:03
D'oh ! si t'as la preuve... je peux pas joué a qui pisse le plus loin, sur ce coup t'as gagné... 
Chaque jour est le premier du reste de ta vie.








0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




