
Bonsoir à tous, je travaille actuellement sur mon projet de PPE qui consiste en l'élaboration d'un robot suiveur de ligne, je me charge de l'élaboration des schémas structurels et j'aurais besoin de vos remarques.
En effet dans notre groupe nous avons décidé d'utiliser deux moteurs pour le déplacement du robot, ces deux moteurs doivent disposer d'un double sens de rotation et pour se faire, j'ai décidé d'utiliser un pont en H pour chaque moteur en mettant ces deux ponts en parallèle.
Et j'aurais tout simplement aimé savoir quel était le meilleur système de commutation à utiliser pour ces pont H, vaut-il mieux utiliser des relais, des transistors ? Quelle est la différence au final par rapport a fonctionnement des moteurs ?
Merci d'avance.

22 réponses à ce sujet
#2

Prinz metal ex-neo
-

- Membres
-

- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 03 avril 2009 - 09:59
Salut gelectron
Pont en H je connais ça très bien je les ai beaucoup utilisé
1-si tu utilise des transistors:
Tu perdras des volts !, exemple si ton moteur marche a 3v tu seras obligé de l’alimenter en 5 volte a peu prêt « a cause de la tension de jonction des transistors » qui consommera 2v (c’est qu’un exemple sa dépond des transistors utiliser) donc tu n’aura pas vcc en sorti mais vcc-2v !
2- si tu utilise des relais :
Tu auras toujours vcc en sorti, mais ! il te faudra au moins 6v pour les alimenter et sa consomme dans les 30ma c’est beaucoup si tu utilise 4 relais en plus ça fait du bruit « tiic », et surtout ça prend de la place (gagner de la place et des ampères et très emportant dans un robot)
Moi je te conseille un circuit intégré l298, c’est un circuit intégré tout petit qui comporte 2 pont en H (c’est ce qu’il te faut !), je te le conseille vivement, je te le dit tout de suit c’est ta solution.
Regarde tu as tout ici !

En plus
http://www.datasheetcatalog.net/datasheets.../9/8/L298.shtml
Bonne chance fait nous part de tes nouvelles !
a+ neo
Pont en H je connais ça très bien je les ai beaucoup utilisé
1-si tu utilise des transistors:
Tu perdras des volts !, exemple si ton moteur marche a 3v tu seras obligé de l’alimenter en 5 volte a peu prêt « a cause de la tension de jonction des transistors » qui consommera 2v (c’est qu’un exemple sa dépond des transistors utiliser) donc tu n’aura pas vcc en sorti mais vcc-2v !
2- si tu utilise des relais :
Tu auras toujours vcc en sorti, mais ! il te faudra au moins 6v pour les alimenter et sa consomme dans les 30ma c’est beaucoup si tu utilise 4 relais en plus ça fait du bruit « tiic », et surtout ça prend de la place (gagner de la place et des ampères et très emportant dans un robot)
Moi je te conseille un circuit intégré l298, c’est un circuit intégré tout petit qui comporte 2 pont en H (c’est ce qu’il te faut !), je te le conseille vivement, je te le dit tout de suit c’est ta solution.
Regarde tu as tout ici !
En plus
http://www.datasheetcatalog.net/datasheets.../9/8/L298.shtml
Bonne chance fait nous part de tes nouvelles !
a+ neo
#3
_Yoda
-

- Membres
-
- 154 messages
Membre occasionnel
- Gender:Male
- Interests:http://www.giamarchi.fr/
Posté 04 avril 2009 - 11:47
Non, je ne suis pas d'accord.
Débâtons un peu, si tu le veux bien.
Il s'agit de réaliser un suiveur de ligne, mon péché mignon.
Il y a peu d'inversion des moteurs et lorsque cela se produit, c'est à vitesse réduite avec un arrêt avant.
Un bon vieux transistor (MOS c'est mieux) en tout et pour tout avec un petit relais.
C'est la seule solution pour avoir le plus de pêche possible.
Je ne suis pas un adapte systématiquement du pont en H, que j'utilise, beaucoup pourtant, à faible puissance pour mes robots pédagogiques.
Débâtons un peu, si tu le veux bien.
Il s'agit de réaliser un suiveur de ligne, mon péché mignon.
Il y a peu d'inversion des moteurs et lorsque cela se produit, c'est à vitesse réduite avec un arrêt avant.
Un bon vieux transistor (MOS c'est mieux) en tout et pour tout avec un petit relais.
C'est la seule solution pour avoir le plus de pêche possible.
Je ne suis pas un adapte systématiquement du pont en H, que j'utilise, beaucoup pourtant, à faible puissance pour mes robots pédagogiques.
#4
Prinz metal ex-neo
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 04 avril 2009 - 01:06
Ouki 
Heu… d’après ce que je sais c’est ton truc les suiveur de ligne alors je la ferme
Débâtons un peu, si tu le veux bien.
Heu… d’après ce que je sais c’est ton truc les suiveur de ligne alors je la ferme
#5
gelectron
-
- Membres
- 4 messages
Nouveau membre
Posté 04 avril 2009 - 02:38
Donc si j'ai bien compris le pont en H n'est pas la meilleure solution.
Ceci dit _Yoda je ne suis pas sûr de saisir le principe de l'utilisation d'un transistor et d'un relais pour obtenir les deux sens de rotation du moteur (désolé je suis débutant) mais j'ai trouvé un schéma qui semble correspondre à ce principe de fonctionnement :
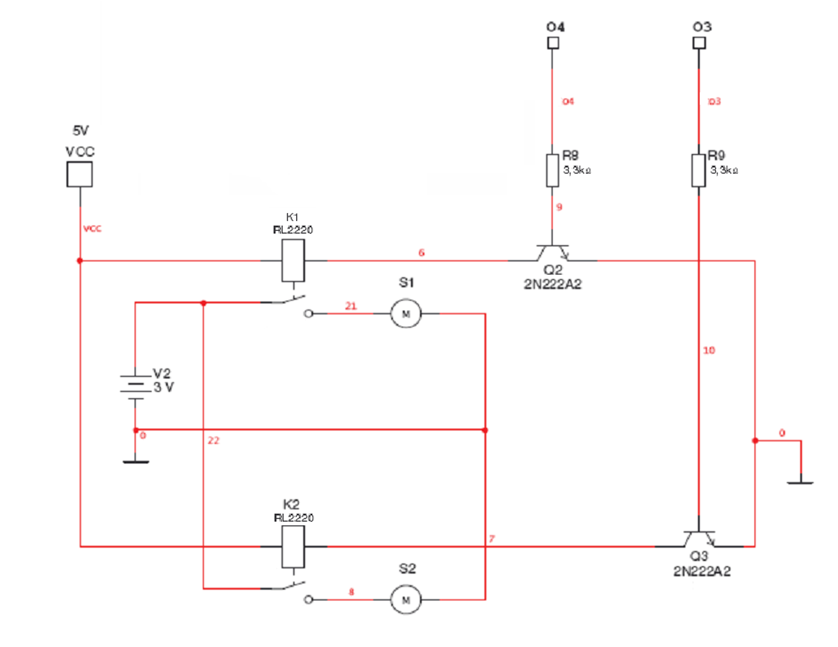
Est-il correcte ? J'ai un doute au niveau de la représentation des relais.
Je repasserais plus tard pour poster le schéma avec les bonnes valeurs des composants.
Ceci dit _Yoda je ne suis pas sûr de saisir le principe de l'utilisation d'un transistor et d'un relais pour obtenir les deux sens de rotation du moteur (désolé je suis débutant) mais j'ai trouvé un schéma qui semble correspondre à ce principe de fonctionnement :
Est-il correcte ? J'ai un doute au niveau de la représentation des relais.
Je repasserais plus tard pour poster le schéma avec les bonnes valeurs des composants.
#6
_Yoda
-
- Membres
-
- 154 messages
Membre occasionnel
- Gender:Male
- Interests:http://www.giamarchi.fr/
Posté 04 avril 2009 - 06:05
Non, ce schéma n'est pas correct.
Il ne permet pas d'inverser le sens de rotation des moteurs, mais seulement de les couper.
Avant d'essayer d'inverser le sens de rotation, il faut d'abord contrôler les moteurs.
Le but est de pouvoir faire varier la vitesse de rotation des moteurs.
Dans l'ordre en partant de l'alim.
+Batt
Moteurs avec une diode en inverse
transistor MOS
Masse batt
Cherche sur le web.
Commence donc par comprendre comment on peut piloter un moteur avec un transistor.
Neo: je ne souhaite pas que tu disparaisses du dialogue.
Mais simplement écouter tes arguments.
Il n'était pas dans mes intentions de t'exclure du débat ou de te remplacer auprès de Gelectron.
Je ne connais pas tes compétences et tu ne connais pas les miennes.
Allez reviens, on a tous les mêmes à la maison ...
Il ne permet pas d'inverser le sens de rotation des moteurs, mais seulement de les couper.
Avant d'essayer d'inverser le sens de rotation, il faut d'abord contrôler les moteurs.
Le but est de pouvoir faire varier la vitesse de rotation des moteurs.
Dans l'ordre en partant de l'alim.
+Batt
Moteurs avec une diode en inverse
transistor MOS
Masse batt
Cherche sur le web.
Commence donc par comprendre comment on peut piloter un moteur avec un transistor.
Neo: je ne souhaite pas que tu disparaisses du dialogue.
Mais simplement écouter tes arguments.
Il n'était pas dans mes intentions de t'exclure du débat ou de te remplacer auprès de Gelectron.
Je ne connais pas tes compétences et tu ne connais pas les miennes.
Allez reviens, on a tous les mêmes à la maison ...
#7
Prinz metal ex-neo
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 04 avril 2009 - 07:42
lol ne t’inquiète pas ! Je ne pleure pas encore 
C’est juste que je n’ai jamais réalisé un robot suiveur de lumière et apparemment vous si alors vous êtes mieux placer pour répondre
Pour ça heu… si gelectron utilise un pic il peut très bien faire ce que tu as cité non ??
Je ne comprends pas en quoi un relais et un transistor et mieux qu’un lm298
a+ neo
C’est juste que je n’ai jamais réalisé un robot suiveur de lumière et apparemment vous si alors vous êtes mieux placer pour répondre
Il y a peu d'inversion des moteurs et lorsque cela se produit, c'est à vitesse réduite avec un arrêt avant.
Pour ça heu… si gelectron utilise un pic il peut très bien faire ce que tu as cité non ??
Je ne comprends pas en quoi un relais et un transistor et mieux qu’un lm298
a+ neo
#8
Matthieu
-

- Membres
-
- 604 messages
Membre passionné
- Gender:Male
Posté 04 avril 2009 - 10:48
Pour ma part , les relais , je les aime pas trop , ils ont des avantages: isolation galvanique ( a quoi sa sert comme tu utilise 2 fois le même VCC )
Et ses inconvénients : le poid , la consommation ( ne pas oublier la diode de roue libre), une faible vitesse de commutation donc pour travailler avec un PWM , s'est moyen ...
Ensuite , transistor ou pont en H , je dirais pour pont en H , car si tu souhaite l'améliorer , pour que la ligne puisse avoir des angle droit , un pont en H seras très utile ....
Voici mon robot suiveur de ligne.
Et ses inconvénients : le poid , la consommation ( ne pas oublier la diode de roue libre), une faible vitesse de commutation donc pour travailler avec un PWM , s'est moyen ...
Ensuite , transistor ou pont en H , je dirais pour pont en H , car si tu souhaite l'améliorer , pour que la ligne puisse avoir des angle droit , un pont en H seras très utile ....
Voici mon robot suiveur de ligne.
#9
gelectron
-
- Membres
- 4 messages
Nouveau membre
Posté 05 avril 2009 - 11:43
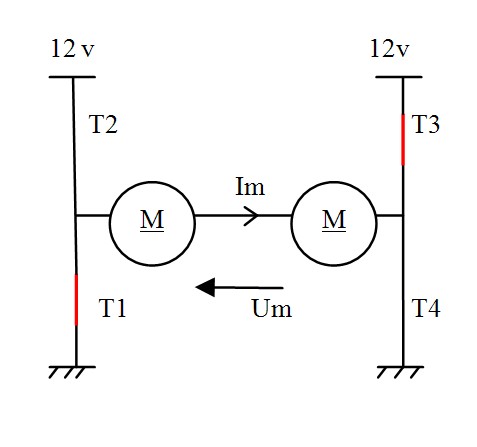
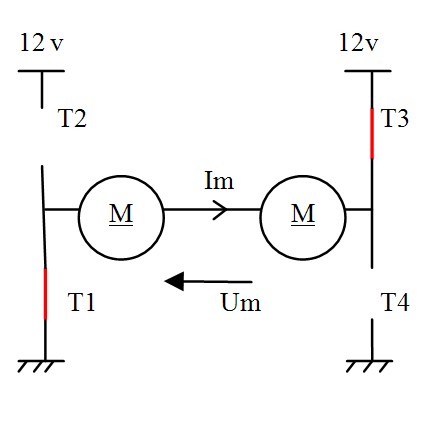
Bon ok donc je vais plutôt opter pour le pont en H, mais j'aurais aimé savoir plutôt que de charger mon circuit avec deux pont en H en parallèle c'est-à-dire un pour chaque moteur, ne serait-il pas mieux que j'utilise un seul pont en H pour les deux moteurs qui seraient du coup en série. J'ai fais un schéma pour expliciter ma question :
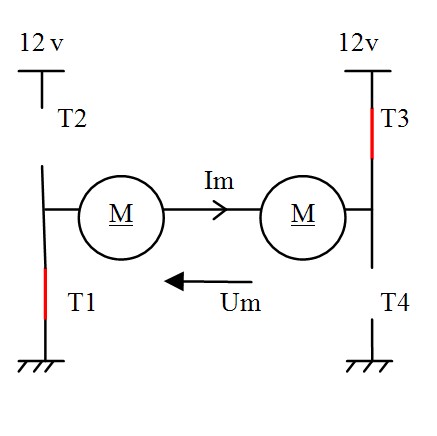
(Les transistors T1 et T3 sont saturés tandis que les transistors T2 et T4 sont bloqués, le moteur tourne donc dans un sens).
(Le premier schéma est le bon, je n'ai pas réussis à supprimer les deux autres)
(Les transistors T1 et T3 sont saturés tandis que les transistors T2 et T4 sont bloqués, le moteur tourne donc dans un sens).
(Le premier schéma est le bon, je n'ai pas réussis à supprimer les deux autres)
Image(s) jointe(s)
#10
_Yoda
-
- Membres
-
- 154 messages
Membre occasionnel
- Gender:Male
- Interests:http://www.giamarchi.fr/
Posté 06 avril 2009 - 10:48
Ton schéma est toujours faux, pont en H ou pas.
Tu as opté pour un pont en H, c'est bien. Mais...
D'après tes commentaires, tu ne sais pas comment on branche tout ça.
Je pense que tu devrais commencer par indiquer tes compétences, ton expérience.
Afin de ne pas partir dans le mur.
Tu as opté pour un pont en H, c'est bien. Mais...
D'après tes commentaires, tu ne sais pas comment on branche tout ça.
Je pense que tu devrais commencer par indiquer tes compétences, ton expérience.
Afin de ne pas partir dans le mur.
#11
mikael
-

- Membres
- 23 messages
Nouveau membre
Posté 15 juin 2009 - 08:21
Donc si j'ai bien compris le pont en H n'est pas la meilleure solution.
Ceci dit _Yoda je ne suis pas sûr de saisir le principe de l'utilisation d'un transistor et d'un relais pour obtenir les deux sens de rotation du moteur (désolé je suis débutant) mais j'ai trouvé un schéma qui semble correspondre à ce principe de fonctionnement :
Est-il correcte ? J'ai un doute au niveau de la représentation des relais.
Je repasserais plus tard pour poster le schéma avec les bonnes valeurs des composants.
bonsoire
j'ai un autre schémat qui irais bien pour la commande de tes moteurs
en trois position avant neutre et arriere et indépendement moteur droit et / ou gauche
Fichier(s) joint(s)
-
 controle_moteur.bmp 3,05 Mo
336 téléchargement(s)
controle_moteur.bmp 3,05 Mo
336 téléchargement(s)
Le succès c'est d'être capable d'aller d'échec en échec sans perdre son enthousiasme
#12
mikael
-
- Membres
- 23 messages
Nouveau membre
Posté 16 juin 2009 - 07:02
bonsoire
j'ai un autre schémat qui irais bien pour la commande de tes moteurs
en trois position avant neutre et arriere et indépendement moteur droit et / ou gauche
juste une petite question
je voudrais savoir si mon schémat et bon ou si il manque des choses
ou si vous avez des remarques
Fichier(s) joint(s)
-
controle_moteur.bmp 3,05 Mo
274 téléchargement(s)
Le succès c'est d'être capable d'aller d'échec en échec sans perdre son enthousiasme
#13
JEF
-

- Membres
-
- 819 messages
Membre passionné
- Gender:Male
- Location:St Cannat (13)
Posté 16 juin 2009 - 08:48
Bonsoir
J'ai pas trop le temps de regardé en detail, mais deja, les 2 transistors du haut: le + arrive sur l'emetteur et le collecteur tu le met a la masse... ça pourra pas marché comme ça.
Ensuite, pour ma pars je t'invite a utiliser le bon vieux L298, toujours aussi fiable et tu as des tas d'exemple sur internet, il est tres simple a utiliser, robuste, enfin, un composant en or.
Relais: contact mecanique, ça vieillit mal, c'est gros, c'est lent, c'est lourd / possibilité de faire passé de la puissance, archi simple, moindre cout je pense
L298: rapide, petit, longue vie, leger / puissance plus faible mais suffisante, plus cher
a toi de voir, perso, je fais tout absolument tout avec le L298.
J'ai pas trop le temps de regardé en detail, mais deja, les 2 transistors du haut: le + arrive sur l'emetteur et le collecteur tu le met a la masse... ça pourra pas marché comme ça.
Ensuite, pour ma pars je t'invite a utiliser le bon vieux L298, toujours aussi fiable et tu as des tas d'exemple sur internet, il est tres simple a utiliser, robuste, enfin, un composant en or.
Relais: contact mecanique, ça vieillit mal, c'est gros, c'est lent, c'est lourd / possibilité de faire passé de la puissance, archi simple, moindre cout je pense
L298: rapide, petit, longue vie, leger / puissance plus faible mais suffisante, plus cher
a toi de voir, perso, je fais tout absolument tout avec le L298.
Chaque jour est le premier du reste de ta vie.
#14
mikael
-
- Membres
- 23 messages
Nouveau membre
Posté 16 juin 2009 - 10:50
Bonsoir
J'ai pas trop le temps de regardé en detail, mais deja, les 2 transistors du haut: le + arrive sur l'emetteur et le collecteur tu le met a la masse... ça pourra pas marché comme ça.
Ensuite, pour ma pars je t'invite a utiliser le bon vieux L298, toujours aussi fiable et tu as des tas d'exemple sur internet, il est tres simple a utiliser, robuste, enfin, un composant en or.
Relais: contact mecanique, ça vieillit mal, c'est gros, c'est lent, c'est lourd / possibilité de faire passé de la puissance, archi simple, moindre cout je pense
L298: rapide, petit, longue vie, leger / puissance plus faible mais suffisante, plus cher
a toi de voir, perso, je fais tout absolument tout avec le L298.
Merci
Je n'étais plus sur pour les transistors
Ça fait longtemps que je n'est pas fait de schémats en électronique
Je me plante en dessin entre les transistor PnP et NpN (Pour la fléche)
Ce système de relais
je l'ai utilisé pour commander le treuil de ma maquette de bateau
( 12 volt -15 Ampère)
Au lieu de mettre un transistor
J'ai mis un servo qui commande un curseur en 3 positions (bobinage,stop et débobinage)
C'est vrai je travail avec 2 tentions différente 6v et 12 v(le seul avantage du relais)
Merci pour l'info
Une derniere question
Quel intensité maxi pour le L298?
Le succès c'est d'être capable d'aller d'échec en échec sans perdre son enthousiasme
#15
Jan
-

- Membres
-
- 4â¯747 messages
Webmaster
- Gender:Male
- Location:Rhône Alpes
Posté 17 juin 2009 - 07:48
Bonjour,
Pour les infos sur les compos, un petit tour ici
http://www.datasheetcatalog.org
ou là
www.alldatasheet.com
et il y en a d'autres...
Par exemple pour ton cas :
http://www.datasheetcatalog.org/datasheet/...ics/mXrqqxz.pdf
A bientôt
Pour les infos sur les compos, un petit tour ici
http://www.datasheetcatalog.org
ou là
www.alldatasheet.com
et il y en a d'autres...
Par exemple pour ton cas :
http://www.datasheetcatalog.org/datasheet/...ics/mXrqqxz.pdf
A bientôt
#16
mikael
-
- Membres
- 23 messages
Nouveau membre
Posté 17 juin 2009 - 09:21
Bonjour,
Pour les infos sur les compos, un petit tour ici
http://www.datasheetcatalog.org
ou là
www.alldatasheet.com
et il y en a d'autres...
Par exemple pour ton cas :
http://www.datasheetcatalog.org/datasheet/...ics/mXrqqxz.pdf
A bientôt
merci bernard
Le succès c'est d'être capable d'aller d'échec en échec sans perdre son enthousiasme
#17
_Yoda
-
- Membres
-
- 154 messages
Membre occasionnel
- Gender:Male
- Interests:http://www.giamarchi.fr/
Posté 18 juin 2009 - 01:34
#18
mikael
-
- Membres
- 23 messages
Nouveau membre
Posté 18 juin 2009 - 04:22
Pour le L298 voir mon document en ligne:
Document L298
merci yoda pour l'info
donc si j'ai bien compris
jusqu'a 2A par moteur on peut utiliser le L298
si non il faut revenir au relais
merci
Le succès c'est d'être capable d'aller d'échec en échec sans perdre son enthousiasme
#19
_Yoda
-
- Membres
-
- 154 messages
Membre occasionnel
- Gender:Male
- Interests:http://www.giamarchi.fr/
Posté 19 juin 2009 - 06:28
Non, tu peux utiliser des ponts.
Mais il faut les construire entièrement avec 4 transistors et toute l'électronique de commande.
Mais cela dépend de tes besoins, encore une fois, il faut être très précis.
Puissance
Utilisation
Inversion du sens de rotation rapide ou pas
Tension de puissance
tension de commande
Signaux de commande
etc,...
Mais il faut les construire entièrement avec 4 transistors et toute l'électronique de commande.
Mais cela dépend de tes besoins, encore une fois, il faut être très précis.
Puissance
Utilisation
Inversion du sens de rotation rapide ou pas
Tension de puissance
tension de commande
Signaux de commande
etc,...
#20
mikael
-
- Membres
- 23 messages
Nouveau membre
Posté 20 juin 2009 - 09:32
Non, tu peux utiliser des ponts.
Mais il faut les construire entièrement avec 4 transistors et toute l'électronique de commande.
Mais cela dépend de tes besoins, encore une fois, il faut être très précis.
Puissance
Utilisation
Inversion du sens de rotation rapide ou pas
Tension de puissance
tension de commande
Signaux de commande
etc,...
merci
Le succès c'est d'être capable d'aller d'échec en échec sans perdre son enthousiasme
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users

