
j'ai fait un schémat de principe
je précise que ce n'est pas mon projet
mes que je donne juste une idée pour aider
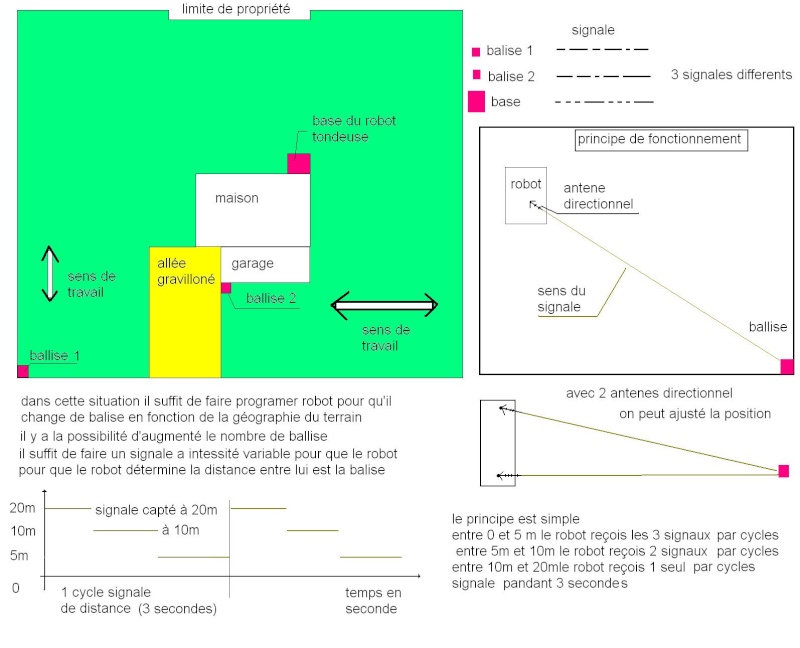
je voudrai savoir si ce systéme est réalisable
et votre opignon sur ce systéme
merci

Nouveau membre

Posté 30 juin 2009 - 12:33
j'ai fait un schémat de principe
je précise que ce n'est pas mon projet
mes que je donne juste une idée pour aider
Nouveau membre
Posté 03 juillet 2009 - 12:46
Nouveau membre
Posté 03 juillet 2009 - 06:18
hummm...
j'y vois quelques impossibilités :
* L' antenne directionnelle ( les signaux sont dans quelle gamme de fréquences ? ) ne va indiquer qu'une orientation grossière du signal ,si toutefois la réalisation est possible. Où est-ce une sorte d'antenne du type radar qui tourne autour d'elle ?
* le niveau des signaux captés ne constitue pas une indication sur la distance qui sépare les émetteurs du récepteur. Sur plusieurs centaines de mètres on peut avoir une idée quand à la proximité d'un tout petit signal. Sur une distance de quelques mètres c'est niet.
Mais dites-moi que je me trompe
ps : c'est un bon sujet.
Membre passionné


Posté 03 juillet 2009 - 08:32
Chaque jour est le premier du reste de ta vie.
Nouveau membre
Posté 04 juillet 2009 - 11:10

Nouveau membre
Posté 04 juillet 2009 - 06:16









0 members, 0 guests, 0 anonymous users





