
Bonjour m'sieur dames,
je suis nouvel inscrit sur ce forum.
quand j'etais jeune (14 ans), j'ai bricolé un premier robot, monté sur 4 roues, que se contentait de chercher a lumiere avec un LDR comme unique oeil.
les années ont passé, et a 38 ans, je me remet a la robotique (j'ai un bts electronique qui date de 1990)
donc pour ceux que ca interesse, je posterai au fur et a mesure des photos de mon 'truc'.
la chose est déja en cours de fabrication.
au programme :
un hexapode, 12 servos pour les membres.
la plateforme est circulaire, diametre total de la bete a peu près 45cm, bras 'étirés'.
2 bras (cad 4 servos) ont déja été assemblés, et j'ai fait quelques test de ma carte de commande.
j'ai choisi un PIC 18F452 , cadencé pour l'instant a 11Mhz (je n'avais que ce quartz sous la main). il tournera a 32 ou 36Mhz, sur le projet finalisé.
pour la gestion des servos, j'ai concu ma propre carte ,le proto est testé, je suis en train de fabriquer une carte intermediaire.
au programme :
A -gestion de 16 servos , PWM : mise a jour en un peu plus d'1:10eme de seconde pour la totalité (elle est de 300ms sur mon proto cadencé a 11Mhz).
B- un port de sortie numérique pour les capteurs a venir (j'en parlerais plus tard) : un port avec 4 'devices', 8 bits de data pour chacuns des ports, plus ligne de signal ( write, et une autre d'usage 'général')
C- 16 canaux analogique en entrée, multiplexés : pour cette partie, j'ai des tests de rapidités a faire, car l'affaire doit etre bien ficelée ( le pic demande pas mal de temps , entre l'acquisition, la mesure, et les contraintes de 'charge' sur son convertisseur a/n )
ces entrées ont deux buts :
1- permettre la commande du robot par potentiometres, pours gerer les 'poses' . une console est en cours de conception, et partiellement testée
2- permettre l'acquisition des signaux analogiques eventuels des capteurs.
coté code, je me suis remis a l'assembleur pour le pic...et ca se passe bien. microchip founit le necessaire pour developper facilement.
pour la programmation du PIC, j'utilise un montage très simple sur le port parallèle, pour programmer 'on board' (ICLVP)
voila en bref la 'chose'.
pour les servos, j'ai cherché chez conrad,marque 'modelcraft', d'entrée de gamme, les moins chers. les 4 premiers me paraissant satisfaisants, j'en ai acheté 12 autre (aie ! )
des photos très bientot !
@+

39 réponses à ce sujet
#1

eihis
-
- Membres
- 63 messages
Membre
- Gender:Male
- Location:bordeaux
Posté 03 septembre 2009 - 03:37
37 sont visibles, 19 sont cachés
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
#2
Aquanum
-

- Membres
-

- 234 messages
Membre occasionnel
- Gender:Male
- Location:Paris
Posté 03 septembre 2009 - 08:25
Oh chouette  Ton projet a l'air super intéressant.
Ton projet a l'air super intéressant.
Et ué ! Je veux bien croire que ça coûte la peau des fesses. 16 servos aoutch ... Mais faut savoir souffrir pour se faire plaisir en robotique
Tiens nous au courant, ça a l'air bien chouette tout ça !
Bon courage en tout cas
Ton projet a l'air super intéressant.Et ué ! Je veux bien croire que ça coûte la peau des fesses. 16 servos aoutch ... Mais faut savoir souffrir pour se faire plaisir en robotique
Tiens nous au courant, ça a l'air bien chouette tout ça !
Bon courage en tout cas
#3
Leon
-

- Membres
-
- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 03 septembre 2009 - 06:27
A la vue de la description, je dirais que ça commence plutôt bien, et que tu semble savoir où tu vas. Beau projet!
Que compte-tu lui faire faire, à terme? Mettre de l'intelligence? Quoi comme type de capteur?
Même si tu n'en n'es pas encore là, c'est intéressant d'imaginer les perspectives de ton projet, de voir l'ampleur des possibilités.
Leon.
Que compte-tu lui faire faire, à terme? Mettre de l'intelligence? Quoi comme type de capteur?
Même si tu n'en n'es pas encore là, c'est intéressant d'imaginer les perspectives de ton projet, de voir l'ampleur des possibilités.
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
#4
eihis
-
- Membres
- 63 messages
Membre
- Gender:Male
- Location:bordeaux
Posté 03 septembre 2009 - 11:21
salut léon !
niveau capteurs, j'ai pris de la marge comme tu as pu le voir. le but étant d'avoir un systeme souple et adapté a différentes config.
pour ce qui est de l'intelligence, il faudrait du temps et un autre fil (qui existe déja je crois ..). le sujet est bien vaste !
j'ai dans la tete un système qui n'est qu'a l'état de concepts et de quelques tests.
l'idée : utiliser une 'matrice', disons de 16*16 entrées de coté.
2 cotés font 8entrées * 2
on aurait donc une sorte de plan 2D, qui est un 'terrain' de connection potentielles.
d'un coté une série de signaux générés par la carte, en 'hard' : horloges, horloges/2 , horloge/4 etc
de l'autre , des sorties vers les commandes des organes moteurs.
de facon totalement arbitraire (hasard) , on interconnecte ces points par le biais des signaux venant des capteurs.
-> selon le but recherché , on introduit une selection des résultats par performance. c'est un peu comme les algorithmes génétiques, en quelque sorte.
En y reflechissant, le but principal du vivant , c'est...de (sur)vivre.
je compte donc commencer le test de cette idée par une pression du type energétique.
par exemple : l'algorithme introduit une selection du type : combien de courant a été consommé pour parcourir 1m ?, et affine par passage succéssifs l'efficacité des combinaisons trouvées pour parcourir le plus de distance en bouffant le moins d'accus.
J'ai conscience que mecaniquement, c'est un peu violent : les essais au hasard de combinaisons de rotation des servos risque d'etre rude pour le robot, mais en ralentissant les mouvements...on verra bien.
Sur un hexapode, plusieurs possibilités sont valables pour avancer (je parle de l'ordre de chaque mouvements) et du coup, c'est interessant de voir quelle combinaison sortira de cet algorithme, en comparaison avec les sequences 'connues' et habituelles (avance 2 pattes, pivot patte opposée etc )
@+ !
->
niveau capteurs, j'ai pris de la marge comme tu as pu le voir. le but étant d'avoir un systeme souple et adapté a différentes config.
pour ce qui est de l'intelligence, il faudrait du temps et un autre fil (qui existe déja je crois ..). le sujet est bien vaste !
j'ai dans la tete un système qui n'est qu'a l'état de concepts et de quelques tests.
l'idée : utiliser une 'matrice', disons de 16*16 entrées de coté.
2 cotés font 8entrées * 2
on aurait donc une sorte de plan 2D, qui est un 'terrain' de connection potentielles.
d'un coté une série de signaux générés par la carte, en 'hard' : horloges, horloges/2 , horloge/4 etc
de l'autre , des sorties vers les commandes des organes moteurs.
de facon totalement arbitraire (hasard) , on interconnecte ces points par le biais des signaux venant des capteurs.
-> selon le but recherché , on introduit une selection des résultats par performance. c'est un peu comme les algorithmes génétiques, en quelque sorte.
En y reflechissant, le but principal du vivant , c'est...de (sur)vivre.
je compte donc commencer le test de cette idée par une pression du type energétique.
par exemple : l'algorithme introduit une selection du type : combien de courant a été consommé pour parcourir 1m ?, et affine par passage succéssifs l'efficacité des combinaisons trouvées pour parcourir le plus de distance en bouffant le moins d'accus.
J'ai conscience que mecaniquement, c'est un peu violent : les essais au hasard de combinaisons de rotation des servos risque d'etre rude pour le robot, mais en ralentissant les mouvements...on verra bien.
Sur un hexapode, plusieurs possibilités sont valables pour avancer (je parle de l'ordre de chaque mouvements) et du coup, c'est interessant de voir quelle combinaison sortira de cet algorithme, en comparaison avec les sequences 'connues' et habituelles (avance 2 pattes, pivot patte opposée etc )
@+ !
->
37 sont visibles, 19 sont cachés
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
#5
eihis
-
- Membres
- 63 messages
Membre
- Gender:Male
- Location:bordeaux
Posté 04 septembre 2009 - 02:27
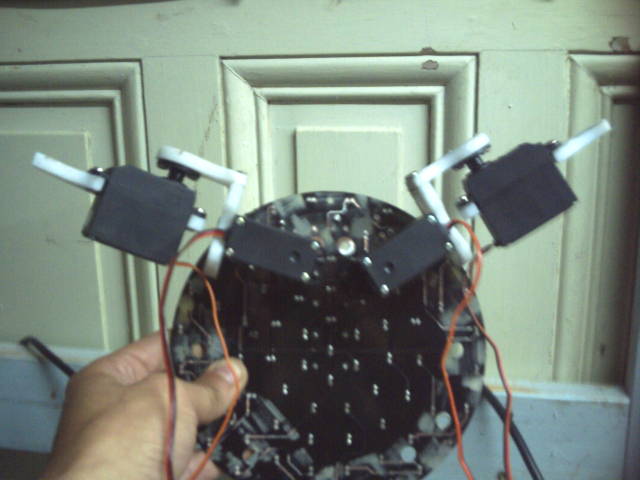
comme promis, les premières photos de la bete.
le plastique utilisé provient de billots de découpe tels qu'on peut les trouver en supermarché . c'est solide, leger et facile a mettre en oeuvre.
j'ai recu mes servos, la scie a chantourner va travailler !
@bientot !
le plastique utilisé provient de billots de découpe tels qu'on peut les trouver en supermarché . c'est solide, leger et facile a mettre en oeuvre.
j'ai recu mes servos, la scie a chantourner va travailler !
@bientot !
Image(s) jointe(s)




- tonio48 aime ceci
37 sont visibles, 19 sont cachés
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
#6
Leon
-
- Membres
-
- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 04 septembre 2009 - 05:20
Merci pour ce retour rapide. La réalisation à l'air propre, et surtout, c'est simple (limitation des pièces mécaniques) et ça à l'air robuste, donc ça me plait bien!comme promis, les premières photos de la bete.
le plastique utilisé provient de billots de découpe tels qu'on peut les trouver en supermarché . c'est solide, leger et facile a mettre en oeuvre.
j'ai recu mes servos, la scie a chantourner va travailler !
@bientot !
On attend avec impatience la suite des aventures. J'ai l'impression que ça va avancer relativement vite, vu que tu sais où tu vas, que tu cherches à faire simple, et vu le travail déjà réalisé.
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
#7
Jan
-

- Membres
-
- 4â¯747 messages
Webmaster
- Gender:Male
- Location:Rhône Alpes
Posté 04 septembre 2009 - 05:33
Bonjour,
Félicitation c'est un beau début...
Tu as fixé directement tes servos sur le circuit imprimé ?
En tous cas c'est propre, j'ai hate de voir la suite ^^
Juste pour info j'avais négocié des servos comparables aux futaba de base (j'imagine pas au niveau qualité) à moins de 5 euros pour une quantité de 8, j'ai lu sur un post que bosser avec des servos était cher.
A bientôt
Félicitation c'est un beau début...
Tu as fixé directement tes servos sur le circuit imprimé ?
En tous cas c'est propre, j'ai hate de voir la suite ^^
Juste pour info j'avais négocié des servos comparables aux futaba de base (j'imagine pas au niveau qualité) à moins de 5 euros pour une quantité de 8, j'ai lu sur un post que bosser avec des servos était cher.
A bientôt
#8
eihis
-
- Membres
- 63 messages
Membre
- Gender:Male
- Location:bordeaux
Posté 05 septembre 2009 - 02:35
hello bernard
les servos sont fixés sur la platine mais ca n'est pas une platine electronique.
en fait c'est une platine epoxy de récup, assez robuste : j'ai éliminé tous les composants et on voit encore les pistes. il sera toujours temps de lui ajouter des nervures de renfort si elle venait a etre trop souple avec le poids total de l'electronique+accus !
pour les servos, de mémoire, les modelcraft visibles sur les photos ( achetés chez conrad ) m'ont couté dans les 6 euros la piece .
les servos sont fixés sur la platine mais ca n'est pas une platine electronique.
en fait c'est une platine epoxy de récup, assez robuste : j'ai éliminé tous les composants et on voit encore les pistes. il sera toujours temps de lui ajouter des nervures de renfort si elle venait a etre trop souple avec le poids total de l'electronique+accus !
pour les servos, de mémoire, les modelcraft visibles sur les photos ( achetés chez conrad ) m'ont couté dans les 6 euros la piece .
37 sont visibles, 19 sont cachés
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
#9
Aquanum
-
- Membres
-
- 234 messages
Membre occasionnel
- Gender:Male
- Location:Paris
Posté 05 septembre 2009 - 05:12
6 pièce ? Whaou c'est super intéressant ! Je ne pensais pas que l'on pouvait descendre en dessous de 20 (Effectivement, c'est bon à savoir !)
Du coup c'est en effet déjà plus abordable
Du coup c'est en effet déjà plus abordable
#10
eihis
-
- Membres
- 63 messages
Membre
- Gender:Male
- Location:bordeaux
Posté 06 septembre 2009 - 04:36
héhé . question servo, je n'ai pas trouvé moins cher ailleurs. et j'en suis content.
par contre, je n'ai pas d'actions chez GOTRONIC.FR , mais ca vaut beaucoup plus le coup que chez CONRAD, question composants.
pour s'en convaincre, ouvrir les 2 sites en parallèle et remplir le panier d'achats identiques : la différence est ENORME. ( ma dernier commande : 90euros total chez gotronic, la meme chez conrad : 147 !!
@+
. question servo, je n'ai pas trouvé moins cher ailleurs. et j'en suis content.par contre, je n'ai pas d'actions chez GOTRONIC.FR , mais ca vaut beaucoup plus le coup que chez CONRAD, question composants.
pour s'en convaincre, ouvrir les 2 sites en parallèle et remplir le panier d'achats identiques : la différence est ENORME. ( ma dernier commande : 90euros total chez gotronic, la meme chez conrad : 147 !!
@+
37 sont visibles, 19 sont cachés
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
#11
Inounx
-

- Membres
- 111 messages
Membre
- Gender:Male
- Location:Toulouse
Posté 07 septembre 2009 - 10:23
héhé
par contre, je n'ai pas d'actions chez GOTRONIC.FR , mais ca vaut beaucoup plus le coup que chez CONRAD, question composants.
pour s'en convaincre, ouvrir les 2 sites en parallèle et remplir le panier d'achats identiques : la différence est ENORME. ( ma dernier commande : 90euros total chez gotronic, la meme chez conrad : 147 !!
@+
Salut,
joli projet que tu as là
J'avais aussi acheté pas mal de ces servo chez conrad pour me faire une bestiole à 4 pattes (que j'ai jamais fait d'ailleurs, mais ce n'est que partie remise) et en faisant des test en comparant les S3003 de futaba et les modelcraft je me suis aperçu que les modelcrafts consommaient plus. Lors d'un déplacement demandant du couple les futaba montaient à environ 500mA (de mémoire) en pic et les modelcraft à presque le double. A voir pour l'autonomie du robot, c'est toujours bon à savoir.
Bonne continuation et tient nous au courant de tes avancées
Mon blog : InounxProjects - Projet en cours : Robert
"All the world's a stage, And all the men and women merely players." - William Shakespeare
"All the world's a stage, And all the men and women merely players." - William Shakespeare
#12
eihis
-
- Membres
- 63 messages
Membre
- Gender:Male
- Location:bordeaux
Posté 07 septembre 2009 - 01:53
Bonjour !
Merci pour l'info inounx. j'en saurais plus une fois les 6 pattes assemblées.
pour l'instant (et comme j'aime bien raconter ma vie ), voila ou j'en suis, en image et en video !.
en fait j'ai concu une deuxieme mouture de la carte d'e/s pilotée par le pic.
je suis passé d'une carte 100% TTL a une carte 90% CMOS .
la raison : le nombre d'e/s nécéssaires, et certains CI cmos inexistants en TTL .
La carte marche impeccable pour sa partie 'pilotage' des 16 servos.
j'ai joint un lien vers une video (un peu sombre) qui montre une séquence de commande des servos en boucle, sur les 2 bras déja assemblés.
la video est ici : http://www.eihis.com/robotics/spider6/spider_test1.avi
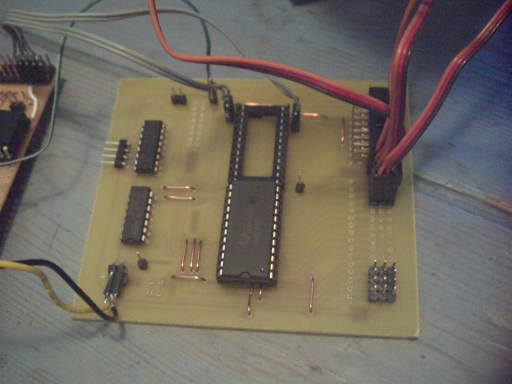
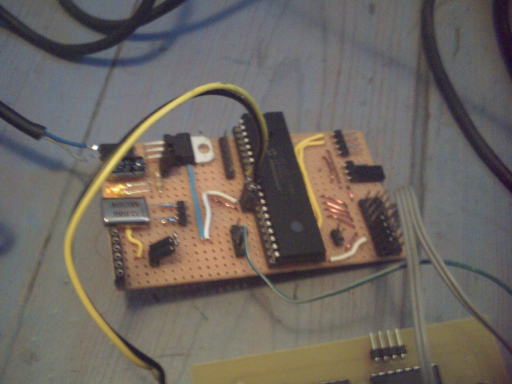
et aussi donc, 2 photos en pieces jointes (pas franchement utiles en fait...lol )
la deuxième : la plaque d'essai avec le PIC
la première, la carte nouvelle en test (on voit dessus l'emplacement du CI d'acquisition A/N qui n'est pas encore monté. celui qui est déja dessus est le démultiplexeur 16 canaux des servos.
prochaine étape : decoupe des autres bras.
@ bientot !
Merci pour l'info inounx. j'en saurais plus une fois les 6 pattes assemblées.
pour l'instant (et comme j'aime bien raconter ma vie ), voila ou j'en suis, en image et en video !.
en fait j'ai concu une deuxieme mouture de la carte d'e/s pilotée par le pic.
je suis passé d'une carte 100% TTL a une carte 90% CMOS .
la raison : le nombre d'e/s nécéssaires, et certains CI cmos inexistants en TTL .
La carte marche impeccable pour sa partie 'pilotage' des 16 servos.
j'ai joint un lien vers une video (un peu sombre) qui montre une séquence de commande des servos en boucle, sur les 2 bras déja assemblés.
la video est ici : http://www.eihis.com/robotics/spider6/spider_test1.avi
et aussi donc, 2 photos en pieces jointes (pas franchement utiles en fait...lol )
la deuxième : la plaque d'essai avec le PIC
la première, la carte nouvelle en test (on voit dessus l'emplacement du CI d'acquisition A/N qui n'est pas encore monté. celui qui est déja dessus est le démultiplexeur 16 canaux des servos.
prochaine étape : decoupe des autres bras.
@ bientot !
Image(s) jointe(s)
37 sont visibles, 19 sont cachés
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
#14
eihis
-
- Membres
- 63 messages
Membre
- Gender:Male
- Location:bordeaux
Posté 08 septembre 2009 - 09:08
hey aquanum .. je regardais ton site avec Genesis... et je sens que ton aide me sera utile plus tard .
plus je réfléchis et plus je sens qu'un pic va etre trop limité en terme de gestion de l'IA, meme en intégrant une reseau de neurones 'en hard' ( c'etait mon idée de base) : du coup, il faudra surement faire un interface de comm. avec un pc dans un premier temps : tes renseignements me seront précieux.
j'ai déja utilise la lib SDL , mais c'etait une SDL pour les graphisme 2D en c. est ce de la meme dont tu parles ?
@+
plus je réfléchis et plus je sens qu'un pic va etre trop limité en terme de gestion de l'IA, meme en intégrant une reseau de neurones 'en hard' ( c'etait mon idée de base) : du coup, il faudra surement faire un interface de comm. avec un pc dans un premier temps : tes renseignements me seront précieux.
j'ai déja utilise la lib SDL , mais c'etait une SDL pour les graphisme 2D en c. est ce de la meme dont tu parles ?
@+
37 sont visibles, 19 sont cachés
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
#15
Aquanum
-
- Membres
-
- 234 messages
Membre occasionnel
- Gender:Male
- Location:Paris
Posté 08 septembre 2009 - 11:46
Bah écoute, si je peux être utile, pas de pb
Mais tu sembles te débrouiller bien plus que moi en électronique
J'ai effectivement utilisé SDL, mais uniquement pour la gestion du clavier et du joystick. Je n'ai pas utilisé la partie graphique.
J'ai juste une fenêtre noire, quand je cliques dessus, j'ai le focus du clavier et je peux contrôler mon robot.
Tu peux regarder mon code source si ça t'intéresse, je l'ai mis en bas de page du projet.
Mais tu sembles te débrouiller bien plus que moi en électronique
J'ai effectivement utilisé SDL, mais uniquement pour la gestion du clavier et du joystick. Je n'ai pas utilisé la partie graphique.
J'ai juste une fenêtre noire, quand je cliques dessus, j'ai le focus du clavier et je peux contrôler mon robot.
Tu peux regarder mon code source si ça t'intéresse, je l'ai mis en bas de page du projet.
#16
eihis
-
- Membres
- 63 messages
Membre
- Gender:Male
- Location:bordeaux
Posté 08 septembre 2009 - 01:38
bah écoute, si je peux t'aider niveau electronique, n'hésite pas!
a part ça, les 6 pattes sont assemblées et montées, et voila 2 photos !
@bientot pour la suite des réjouissances
a part ça, les 6 pattes sont assemblées et montées, et voila 2 photos !
@bientot pour la suite des réjouissances
Image(s) jointe(s)


37 sont visibles, 19 sont cachés
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
#17
eihis
-
- Membres
- 63 messages
Membre
- Gender:Male
- Location:bordeaux
Posté 09 septembre 2009 - 01:44
... en faisant des test en comparant les S3003 de futaba et les modelcraft je me suis aperçu que les modelcrafts consommaient plus. Lors d'un déplacement demandant du couple les futaba montaient à environ 500mA (de mémoire) en pic et les modelcraft à presque le double. A voir pour l'autonomie du robot, c'est toujours bon à savoir.
premiers tests et recherche des min/max pour les positions des servos :
en initialisant les 12 simultanément, la conso s'envole, le pauvre 7805 surchauffe : forcément, 1A pour 12servos...c'etait un peu limite...
modification : j'ajoute un regulateur 7805 monté sur un 2n3055 pour la section servos. du coup, petite coupure piste et modif sur la carte E/S ... des choses qui arrivent
j'aimerais savoir quel systeme vous utilisez pour la régule de vos accus ?
@bientot !
37 sont visibles, 19 sont cachés
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
#19
Prinz metal ex-neo
-

- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 09 septembre 2009 - 02:34
et avec un gros dissipateur ?
#20
Aquanum
-
- Membres
-
- 234 messages
Membre occasionnel
- Gender:Male
- Location:Paris
Posté 09 septembre 2009 - 03:27
 Je verrais bien le petit robot avec un ENORME radiateur en fonte sur le dos
Je verrais bien le petit robot avec un ENORME radiateur en fonte sur le dos Mais sinon ué, faut voir, avec un radiateur ça pourrait peut-être le faire.
Mais tu as des 7805 d'ampérage plus élevé que 1A nan ?
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




