
hm le lm323 je crois, de mémoire fait 3A .
bon le montage avec 3055 donne de la marge, pas besoin d'un dissipateur énorme a priori.j'ai ajouté une capa de 470uf en sortie, et une 1n4007 entre la masse et la masse du régulteur pour compenser la perte de la jonction B-E du transistor. a l'arrivé, 5.2V et ca passe nickel, le 7805 n'est plus du tout chaud.
j'ai passé l'après midi a faire une sequence pour patte .. une video bientot !
@+ et merci pour vos réponses !

39 réponses à ce sujet
#21

eihis
-
- Membres
- 63 messages
Membre
- Gender:Male
- Location:bordeaux
Posté 09 septembre 2009 - 04:22
37 sont visibles, 19 sont cachés
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
#22
Leon
-

- Membres
-

- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 09 septembre 2009 - 06:31
Je ne comprend pas: pourquoi veux-tu réguler la tension qui alimente tes servos? Les servos sont prévus pour être directement alimentés par des batteries, et tolèrent une plage de tension assez large. Même une tension 'sale' et pas régulée conviendra. Seule l'électronique a besoin d'une tension propre et régulée. Qu'est-ce que tu as comme batterie?premiers tests et recherche des min/max pour les positions des servos :
en initialisant les 12 simultanément, la conso s'envole, le pauvre 7805 surchauffe : forcément, 1A pour 12servos...c'etait un peu limite...
modification : j'ajoute un regulateur 7805 monté sur un 2n3055 pour la section servos. du coup, petite coupure piste et modif sur la carte E/S ... des choses qui arrivent
j'aimerais savoir quel systeme vous utilisez pour la régule de vos accus ?
@bientot !
C'est une grosse erreur de conception que de vouloir alimenter des servos ou des moteurs par l'intermédiaire d'un régulateur linéaire! Tu gaspille de l'énergie électrique pour rien!
Peux-tu nous en dire plus?
Sinon, comme dit sur mon site, j'alimente toute l'électronique de mon robot avec un régulateur à découpage fait à base de LM2575. L'électronique bouffe plus de 500mA en 5V. La batterie est une 9.6V. Il était évidemment hors de question d'utiliser un régulateur linéaire!
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
#23
eihis
-
- Membres
- 63 messages
Membre
- Gender:Male
- Location:bordeaux
Posté 10 septembre 2009 - 03:45
kikou léon !
pas de panique : je régule mes servos pour des raisons bien précises :
1-Je fais mes tests a partir d'une alim variable
2-J'ai besoin d'une tension fixe pour mesurer facilement le courant consommé par la suite ( cf. mon idée de stratégie pour le developpement de l'IA : pression 'energetique' )
3-Dans le cas ou je ferais une modif servo pour avoir leur position en données entrantes, la tension qui reviendra dépendra directement , a sa valeur maximale, de la tension d'alim des servos : j'ai donc dans l'idée de préparer déja le terrain en faisant tout tourner sous 5v, de facon a ne pas a voir a ajouter de composants si jamais je decidais d'utiliser ce feedback 'position' , vu que la logique de la carte et la carte PIC18F elle meme prévues pour 5V.
Enfin, pour l'instant, l'alim variable en 12V m'est nécéssaire car je bosse sur une carte 'monitoring' (controle par potars + visu de la memoire, etat du pic etc ) connectable qui, elle, tournera en 12V , et cette carte est actuellement directement alimentée par ma carte E/S
Voila pourquoi
pour maintenant, parceque j'ai un esprit de contradiction ( ) :
1 - pour l'efficience, je suis daccord avec toi bien que, tout de meme, on est pas dans des alims de 100taines de watt : j'objecterai que le rapport poids/efficience diminue a mes yeux le gain d'utiliser une alim a découpage ( [ poids de la carte a base de LM2575 avec la grosse self moulée -VS- poids du boitier plastique du 7805 + 2n3055 ] )
2 - limitation des composants = moins de difficultées a trouver les sources de pannes
3 - prix du composant ( lm2575 = 3* lm7805
ok, je cherche la petite bete , je sais !
pas de panique : je régule mes servos pour des raisons bien précises :
1-Je fais mes tests a partir d'une alim variable
2-J'ai besoin d'une tension fixe pour mesurer facilement le courant consommé par la suite ( cf. mon idée de stratégie pour le developpement de l'IA : pression 'energetique' )
3-Dans le cas ou je ferais une modif servo pour avoir leur position en données entrantes, la tension qui reviendra dépendra directement , a sa valeur maximale, de la tension d'alim des servos : j'ai donc dans l'idée de préparer déja le terrain en faisant tout tourner sous 5v, de facon a ne pas a voir a ajouter de composants si jamais je decidais d'utiliser ce feedback 'position' , vu que la logique de la carte et la carte PIC18F elle meme prévues pour 5V.
Enfin, pour l'instant, l'alim variable en 12V m'est nécéssaire car je bosse sur une carte 'monitoring' (controle par potars + visu de la memoire, etat du pic etc ) connectable qui, elle, tournera en 12V , et cette carte est actuellement directement alimentée par ma carte E/S
Voila pourquoi
pour maintenant, parceque j'ai un esprit de contradiction (
) :1 - pour l'efficience, je suis daccord avec toi bien que, tout de meme, on est pas dans des alims de 100taines de watt : j'objecterai que le rapport poids/efficience diminue a mes yeux le gain d'utiliser une alim a découpage ( [ poids de la carte a base de LM2575 avec la grosse self moulée -VS- poids du boitier plastique du 7805 + 2n3055 ] )
2 - limitation des composants = moins de difficultées a trouver les sources de pannes
3 - prix du composant ( lm2575 = 3* lm7805
ok, je cherche la petite bete , je sais !
37 sont visibles, 19 sont cachés
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
#24
Leon
-
- Membres
-
- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 10 septembre 2009 - 07:08
kikou léon !
pas de panique : je régule mes servos pour des raisons bien précises :
1-Je fais mes tests a partir d'une alim variable
2-J'ai besoin d'une tension fixe pour mesurer facilement le courant consommé par la suite ( cf. mon idée de stratégie pour le developpement de l'IA : pression 'energetique' )
3-Dans le cas ou je ferais une modif servo pour avoir leur position en données entrantes, la tension qui reviendra dépendra directement , a sa valeur maximale, de la tension d'alim des servos : j'ai donc dans l'idée de préparer déja le terrain en faisant tout tourner sous 5v, de facon a ne pas a voir a ajouter de composants si jamais je decidais d'utiliser ce feedback 'position' , vu que la logique de la carte et la carte PIC18F elle meme prévues pour 5V.
Enfin, pour l'instant, l'alim variable en 12V m'est nécéssaire car je bosse sur une carte 'monitoring' (controle par potars + visu de la memoire, etat du pic etc ) connectable qui, elle, tournera en 12V , et cette carte est actuellement directement alimentée par ma carte E/S
Voila pourquoi
pour maintenant, parceque j'ai un esprit de contradiction (
1 - pour l'efficience, je suis daccord avec toi bien que, tout de meme, on est pas dans des alims de 100taines de watt : j'objecterai que le rapport poids/efficience diminue a mes yeux le gain d'utiliser une alim a découpage ( [ poids de la carte a base de LM2575 avec la grosse self moulée -VS- poids du boitier plastique du 7805 + 2n3055 ] )
2 - limitation des composants = moins de difficultées a trouver les sources de pannes
3 - prix du composant ( lm2575 = 3* lm7805
ok, je cherche la petite bete , je sais !
Pourquoi pas...
Mais dis moi, ne compte-tu pas rendre ton robot autonome? Où est-ce qu'il aurra toute sa vie un fil (d'arraignée, bien sur) à la patte?
Si tu veux le rendre autonome, il faut chercher à réduire au maximum la consommation électrique. Et dans ce cas, j'aurais du mal à comprendre ton choix...
Sinon, as-tu une estimation du courant maxi que consommeront tous tes servos? As-tu fait des essais avec toutes les pattes en l'air, ou avec les pattes forçant pour soulever le poids du robot? Avec 6 servos bas de gamme, tu vas (à mon avis) largement dépasser 1 A de consommation. Le dissipateur devient indispensable pour ton transistor 'poubelle à watt'.
Dans ces conditions, es-tu bien sur de toi quand tu compares une alim à découpage et une alim linéaire? Un radiateur capable de dissiper 10W (2A et 5V de chute), ça fait quand même une taille non négligeable sur un petit robot.
Exemple
L'alim à découpage sera plus compacte, c'est certain. Les bobines passant 3A spéciales alim à découpage sont bien compactes, tu sais... Dans cette gamme de puissance, c'est CERTAIN qu'un régulateur à découpage sera plus compact qu'un régulateur linéaire.
Sans parler du sur-poids introduit par les batteries supplémentaire.
Mais bon, après, tu fais comme tu veux...
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
#25
eihis
-
- Membres
- 63 messages
Membre
- Gender:Male
- Location:bordeaux
Posté 11 septembre 2009 - 10:05
Oh léon , ne fait pas du boudin ... je t'ai dit que je cherchais la petite bete.
Ton choix est censé , j'ai pris note !
Pour ce qui est ne la conso des servos, actuellement, en mouvement, l'araignée monte en pic a 1A sous 12V ( et c'est sans forcer exagérement sur les servos, cad faisant 'normallement' marcher les bras).
Ce que je trouve interressant a l'heure actuelle c'est que la programmation-même des mouvements de chaque element oblige a une reflection sur la consommation ( de maniere a ce que les servos ne bouffent pas 'un max' ) , chose que dame nature a réglé toute seule en millions d'années.
on fait un robot, et on retombe sur les memes problemes : c'est génial
A part ça, pour l'instant, la sequence marche 'avant' est terminée, mais je dois maintenant ajuster les mouvements synchrones pour optimiser la trajectoire (mouvement circulaire -> mouvement rectiligne des 'avant' bras a compenser avec une rotation des elements touchant le sol )
Je n'ai pas pesé la bete, mais 3 cartes epoxy+composants + 12*37g , ca devrait faire dans les 500grammes au max ...
Combien pesent des accus NimH ? des Lipo ? des LiIon ?
Merci pour tes réponses
... je t'ai dit que je cherchais la petite bete.Ton choix est censé , j'ai pris note !
Pour ce qui est ne la conso des servos, actuellement, en mouvement, l'araignée monte en pic a 1A sous 12V ( et c'est sans forcer exagérement sur les servos, cad faisant 'normallement' marcher les bras).
Ce que je trouve interressant a l'heure actuelle c'est que la programmation-même des mouvements de chaque element oblige a une reflection sur la consommation ( de maniere a ce que les servos ne bouffent pas 'un max' ) , chose que dame nature a réglé toute seule en millions d'années.
on fait un robot, et on retombe sur les memes problemes : c'est génial
A part ça, pour l'instant, la sequence marche 'avant' est terminée, mais je dois maintenant ajuster les mouvements synchrones pour optimiser la trajectoire (mouvement circulaire -> mouvement rectiligne des 'avant' bras a compenser avec une rotation des elements touchant le sol )
Je n'ai pas pesé la bete, mais 3 cartes epoxy+composants + 12*37g , ca devrait faire dans les 500grammes au max ...
Combien pesent des accus NimH ? des Lipo ? des LiIon ?
Merci pour tes réponses
37 sont visibles, 19 sont cachés
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
#27
eihis
-
- Membres
- 63 messages
Membre
- Gender:Male
- Location:bordeaux
Posté 11 septembre 2009 - 10:57
Eh oui aqua !
bon je dois dire que le monde est tellement bien fait que je suis gardien de nuit : j'ai du temps pour cogiter mon truc , et je bosse dessus pendant mes jours de repos.
la video d'un 1.5 parcourus est ici :
http://www.eihis.com/robotics/spider6/spider_walk_11-09-2009.AVI (9Mo)
-- on peut constater la démarche qui ressemble a celle d'un mec bourré ou encore un peu celle d'un patineur, vu de derrière (ya des trucs a peaufiner lol) .
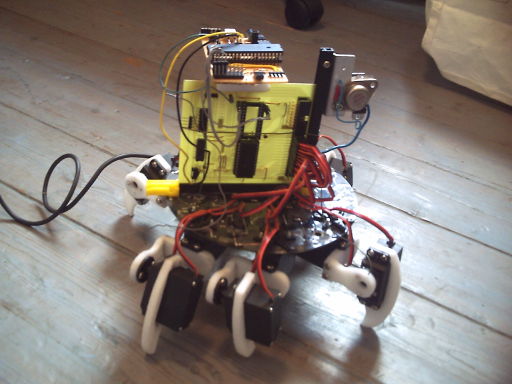
..et une photo de la bete a l'arret, avec le montage (hasardeux) des 3 cartes.
dédicace a léon qui reconnaitra le transistor "poubelle a watt" en aileron arrière ( je me suis dit que si la bete allait trop vite, ca pourrait la stabiliser dans les courbes! )
)
bon je dois dire que le monde est tellement bien fait que je suis gardien de nuit : j'ai du temps pour cogiter mon truc , et je bosse dessus pendant mes jours de repos.
la video d'un 1.5 parcourus est ici :
http://www.eihis.com/robotics/spider6/spider_walk_11-09-2009.AVI (9Mo)
-- on peut constater la démarche qui ressemble a celle d'un mec bourré ou encore un peu celle d'un patineur, vu de derrière (ya des trucs a peaufiner lol) .
..et une photo de la bete a l'arret, avec le montage (hasardeux) des 3 cartes.
dédicace a léon qui reconnaitra le transistor "poubelle a watt" en aileron arrière ( je me suis dit que si la bete allait trop vite, ca pourrait la stabiliser dans les courbes!
)
Image(s) jointe(s)
37 sont visibles, 19 sont cachés
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
#29
Leon
-
- Membres
-
- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 11 septembre 2009 - 06:45
Bravo pour ce début. Ca c'est un projet qui avance très vite!
Pour des premiers pas, c'est bien! OK, les consignes des servos sont à optimiser pour moins faire patiner les pattes...
Pourquoi ne pas mettre des patins aux pattes de ton arraignée, pour qu'elle agrippe mieux?
Le style est 'original'... Il faudra que tu penses à intégrer tes cartes plus proprement. Je pense que c'est important d'avoir un robot 'propre'. Ca évite les emmerdes, et puis c'est plus sympa à regarder fonctionner. Mais je peux tout à fait comprendre que tu aie fait ça rapidement pour faire marcher la bête le plus tôt possible.
Merci pour la dédicace! Pour le poids des batteries, tout dépend de l'autonomie attendue! Mais pour 2h d'autonomie à 1A en 10V, tu devrais en avoir pour 300 à 400g en Ni-Mh, et 200g pour 1h d'autonomie. Oui, ça n'est (malheureusement) pas proportionnel à l'inverse du temps. Et je n'y connais rien en Li-Ion.
Encore bravo!
Leon.
Pour des premiers pas, c'est bien! OK, les consignes des servos sont à optimiser pour moins faire patiner les pattes...
Pourquoi ne pas mettre des patins aux pattes de ton arraignée, pour qu'elle agrippe mieux?
Le style est 'original'... Il faudra que tu penses à intégrer tes cartes plus proprement. Je pense que c'est important d'avoir un robot 'propre'. Ca évite les emmerdes, et puis c'est plus sympa à regarder fonctionner. Mais je peux tout à fait comprendre que tu aie fait ça rapidement pour faire marcher la bête le plus tôt possible.
Merci pour la dédicace! Pour le poids des batteries, tout dépend de l'autonomie attendue! Mais pour 2h d'autonomie à 1A en 10V, tu devrais en avoir pour 300 à 400g en Ni-Mh, et 200g pour 1h d'autonomie. Oui, ça n'est (malheureusement) pas proportionnel à l'inverse du temps. Et je n'y connais rien en Li-Ion.
Encore bravo!
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
#30
Aquanum
-

- Membres
-
- 234 messages
Membre occasionnel
- Gender:Male
- Location:Paris
Posté 11 septembre 2009 - 10:30
Héhé ! Super dis donc. En quelques jours hop tu as ton robot fonctionnel J'aimerais pouvoir avancer aussi vite sur mon robot !
Avec des patins en effets il glisserait peut être moins sur le sol.
Sinon super début
Il n'y a plus qu'à le mettre sur batterie et ça sera vraiment classe !
J'aimerais pouvoir avancer aussi vite sur mon robot !Avec des patins en effets il glisserait peut être moins sur le sol.
Sinon super début
Il n'y a plus qu'à le mettre sur batterie et ça sera vraiment classe !
#31
eihis
-
- Membres
- 63 messages
Membre
- Gender:Male
- Location:bordeaux
Posté 12 septembre 2009 - 04:39
kikou tout le monde .
Bon, après quelques essais, et une nuit a réfléchir sur le sujet, je vais faire une assez grosse modif, concernant la mécanique.
En effet, il s'avère que question puissance, l'ensemble ne me satisfait pas.
je m'explique :
chaque servo 'déplace' dans les 37N/cm , sur un débattement de 180°
hors , en fait, dans l'état actuel, je n'utilise que 30 a 60° maximum du débatement, pour les avant bras comme pour les extrémités :
ca a deux conséquences :
1- baisse de la résolution (angle minimum) , quand on programme (je 'fous en l'air' dans les 2/3 de la résolution (pwm) a la poubelle )
2- je fous a la poubelle de la puissance : mieux vaudrait utiliser les 180° de mouvement par un effet de levier.
-> la grosse modif va donc consister a changer le montage méca des extrémités de bras (->effet de levier) pour obtenir que le mouvement de 180° du servo fasse tourner le bras de 60° maxi : je devrais ainsi gagner en puissance sur les 6 bras , puisque utilisant un rapport 1:3
les bras qui font les rotations dans le plan perpendiculaire a la gravité ('avant bras') sont eux aussi sous employés, mais pour l'instant ils ne posent pas de probleme niveau puissance (mais ca pourrait changer avec le pack d'accus sur le dos ) et suffisent a faire translater la masse du robot vers la direction voulue.
Voila pour la mécanique.
niveau electronique, j'ai fais des mesures a l'interieur des servos Modelcraft (petit parenthèse pour Léon), en vue de les modifier pour avoir un retour d'info sur leur position vers le PIC (CA/N) :
En sortie du potar d'asservissement, on trouve une tension variant de 0.5V a 2V , en fonction de la position servo : 0° / 180° , alimenté sous 5V régulés (je n'ai pas encore testé en non régulé..mais ya peut etre une zener planquée sur la carte du servo ... ca serait une bonne nouvelle )
Leon, si tu as l'occasion, pourrais tu mesurer ca sur d'autres servos tels que les tiens ? j'aurais aimé savoir s'il y'a en quelque sorte un 'standard' dans ces mesures, d'un servo a l'autre.
Ma prochaine étape electronique est le branchement du clavier et de l'afficheur d'état + interfacage avec le PIC qui doit gérer tout ça !
bref j'ai du pain sur la planche,
@bientot ! et merci pour vos encouragements, vos commentaires et vos conseils :=)
Bon, après quelques essais, et une nuit a réfléchir sur le sujet, je vais faire une assez grosse modif, concernant la mécanique.
En effet, il s'avère que question puissance, l'ensemble ne me satisfait pas.
je m'explique :
chaque servo 'déplace' dans les 37N/cm , sur un débattement de 180°
hors , en fait, dans l'état actuel, je n'utilise que 30 a 60° maximum du débatement, pour les avant bras comme pour les extrémités :
ca a deux conséquences :
1- baisse de la résolution (angle minimum) , quand on programme (je 'fous en l'air' dans les 2/3 de la résolution (pwm) a la poubelle )
2- je fous a la poubelle de la puissance : mieux vaudrait utiliser les 180° de mouvement par un effet de levier.
-> la grosse modif va donc consister a changer le montage méca des extrémités de bras (->effet de levier) pour obtenir que le mouvement de 180° du servo fasse tourner le bras de 60° maxi : je devrais ainsi gagner en puissance sur les 6 bras , puisque utilisant un rapport 1:3
les bras qui font les rotations dans le plan perpendiculaire a la gravité ('avant bras') sont eux aussi sous employés, mais pour l'instant ils ne posent pas de probleme niveau puissance (mais ca pourrait changer avec le pack d'accus sur le dos ) et suffisent a faire translater la masse du robot vers la direction voulue.
Voila pour la mécanique.
niveau electronique, j'ai fais des mesures a l'interieur des servos Modelcraft (petit parenthèse pour Léon), en vue de les modifier pour avoir un retour d'info sur leur position vers le PIC (CA/N) :
En sortie du potar d'asservissement, on trouve une tension variant de 0.5V a 2V , en fonction de la position servo : 0° / 180° , alimenté sous 5V régulés (je n'ai pas encore testé en non régulé..mais ya peut etre une zener planquée sur la carte du servo ... ca serait une bonne nouvelle
)Leon, si tu as l'occasion, pourrais tu mesurer ca sur d'autres servos tels que les tiens ? j'aurais aimé savoir s'il y'a en quelque sorte un 'standard' dans ces mesures, d'un servo a l'autre.
Ma prochaine étape electronique est le branchement du clavier et de l'afficheur d'état + interfacage avec le PIC qui doit gérer tout ça !
bref j'ai du pain sur la planche,
@bientot ! et merci pour vos encouragements, vos commentaires et vos conseils :=)
37 sont visibles, 19 sont cachés
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
#32
Leon
-
- Membres
-
- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 12 septembre 2009 - 06:35
Pour comprendre l'électronique des servos de modélisme, rien de mieux que de regarder les datasheet des composants à l'intérieur.
Dans mes servos, j'ai ce composant là, ou celui-là.
On voit bien que dans les 2 cas le potentiomètre est alimenté par une sortie de tension régulée. Je pense que tu peux donc y aller les yeux fermés.
Par contre, si j'étais toi, pour éviter que la consommation des servos ne vienne perturber la lecture des potentiomètre (chute de tension dans le fil de masse), je racourcirai au maximum les cordons des servos.
Leon.
Dans mes servos, j'ai ce composant là, ou celui-là.
On voit bien que dans les 2 cas le potentiomètre est alimenté par une sortie de tension régulée. Je pense que tu peux donc y aller les yeux fermés.
Par contre, si j'étais toi, pour éviter que la consommation des servos ne vienne perturber la lecture des potentiomètre (chute de tension dans le fil de masse), je racourcirai au maximum les cordons des servos.
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
#33
Inounx
-

- Membres
- 111 messages
Membre
- Gender:Male
- Location:Toulouse
Posté 13 septembre 2009 - 10:05
Salut,
ça avance bien ton projet eihis Continue comme ça !
J'aime bien le style des pattes comme tu les as faites.
Sinon pour le fait que sa patine, tu est sur que sa ne pourrait pas venir (en partie) du fait que ton centre de gravité est peut être mal placé à cause des cartes positionnées en hauteur sur le robot, mais aussi parce qu'il doit se trainer le fil d'alim ? Après c'est sur que plastique lisse sur parquet c'est pas l'idéal. (D'ailleurs, sa démarche est assez marrante, au moins tu pourra te vanter d'être le seul à avoir un robot bourré).
Je suis curieux de voir ton mécanisme de démultiplication sur tes pattes, comment tu va bricoler ça ^^. Par contre pour gagner en résolution tu perdra au final en vitesse max de déplacement (on va me dire que c'est logique...)
Je me demandais aussi, quand ton robot se déplace, les servos forcent pas mal ou sa reste assez "normal" ? parce qu'avec 6 pattes on pourrais se dire qu'au final si ya 3 pattes pour soulever le poids du robot pendant que les autres avancent sa fait pas énormément de force au niveau des pattes (c'est juste de la curiosité pour si jme lance un jour à en faire un).
allez bon courage pour la suite
ça avance bien ton projet eihis
Continue comme ça !J'aime bien le style des pattes comme tu les as faites.
Sinon pour le fait que sa patine, tu est sur que sa ne pourrait pas venir (en partie) du fait que ton centre de gravité est peut être mal placé à cause des cartes positionnées en hauteur sur le robot, mais aussi parce qu'il doit se trainer le fil d'alim ? Après c'est sur que plastique lisse sur parquet c'est pas l'idéal. (D'ailleurs, sa démarche est assez marrante, au moins tu pourra te vanter d'être le seul à avoir un robot bourré).
Je suis curieux de voir ton mécanisme de démultiplication sur tes pattes, comment tu va bricoler ça ^^. Par contre pour gagner en résolution tu perdra au final en vitesse max de déplacement (on va me dire que c'est logique...)
Je me demandais aussi, quand ton robot se déplace, les servos forcent pas mal ou sa reste assez "normal" ? parce qu'avec 6 pattes on pourrais se dire qu'au final si ya 3 pattes pour soulever le poids du robot pendant que les autres avancent sa fait pas énormément de force au niveau des pattes (c'est juste de la curiosité pour si jme lance un jour à en faire un).
allez bon courage pour la suite
Mon blog : InounxProjects - Projet en cours : Robert
"All the world's a stage, And all the men and women merely players." - William Shakespeare
"All the world's a stage, And all the men and women merely players." - William Shakespeare
#34
eihis
-
- Membres
- 63 messages
Membre
- Gender:Male
- Location:bordeaux
Posté 13 septembre 2009 - 12:47
@Leon : Ok impecc,merci pour les datasheets - c'est d'autant plus cool que ma carte pourra du coup servir avec des servos modifiés ou pas, de n'importe quelle 'marque', a priori !
@inounx :
Pour la séquence de marche qui est visible dans la video, il y'a un pas 'pourri' ou les 3 pattes formant le triangle 'groupe 1' descendent pendant que les 3 autres opposées montent (groupe 2).
c'est une étape qui n'est pas correcte, j'aurais du décaler les sequences du 1er groupe et du 2ème dans le temps, de manière a ce que 3 pattes (donc un groupe) soient en permanence en contact avec le sol.
Mais a la manière dont j'ai programmé les sequences en assembleur, ca n'etait pas possible : j'ai fait le truc vite fait, pour voir si en gros, ca marchait.
En fait j'hésite encore entre une programmation bete et méchante , c'est a dire a chaque étape, un tableau stockant les valeurs de position pour chacun des 12servos, et une programmation plus proche du 'bio', en liant chaque element a l'autre par une suite logique ( tel commande sur tel element entraine une reaction + tel commande sur tel autre .., 'a la maniere des pattes d'un mille patte..')
Pour ce qui est de la force sur les servos,j'ai moi aussi fait ton calcul : le poids total sur 3 pieds = poids/3 a gerer pour un servo, mais ca n'est au final pas si simple : quand tu es en appui sur les 2 pattes gauches, et celle du milieu droite, par exemple, tu te retrouve avec deux pattes pour supporter d'un cote, et une seule de l'autre : du coup, la patte droite, seule, doit 'lever' le poids de la patte droite avant + droite arriere (cad son coté)+ 1/3 de la masse des cartes+platine. a l'opposé, les 2 pattes n'ont qu'a 'lever' 1 patte , celle du milieu gauche , +1/3 de la masse cartes+platine.
tout se passe bien tant que tu ne fais pas aller trop a l'horizontale le bout de la patte (question de vecteurs de force, of course..), mais dès que la fameuse patte seule prends un peu de retard (parcequ'elle 'force' plus), l'ensemble se déséquilibre, et de plus en plus de poids se retrouve sur elle.... et a l'arrivée, ce servo force bcp plus que les 2 autres a l'opposé.Le montage approximatif 'en hauteur' défavorise encore plus l'equilibrage et accélère l'apparition du phénomeme.
D'ou la modif que j'envisage , de manière a avoir une araignée sure de ses mouvements.
En fait, en laissant les pattes dans l'état actuel, je ne pourrais pas , non plus, faire d'autres essais de locomotion (par exemple, sur 4 pattes en utilisant les 2 autres comme equilibreurs, a la maniere d'une tete+ queue de lézard, ou encore marcher de traver, comme un crabe), par faute de puissance disponible et nécéssaire sur ces pattes.
Le glissement a été résolu par l'ajout de mini patins en caoutchouc collés aux extrémités des pattes et cette partie n'a pas posé de problemes.
@inounx :
Pour la séquence de marche qui est visible dans la video, il y'a un pas 'pourri' ou les 3 pattes formant le triangle 'groupe 1' descendent pendant que les 3 autres opposées montent (groupe 2).
c'est une étape qui n'est pas correcte, j'aurais du décaler les sequences du 1er groupe et du 2ème dans le temps, de manière a ce que 3 pattes (donc un groupe) soient en permanence en contact avec le sol.
Mais a la manière dont j'ai programmé les sequences en assembleur, ca n'etait pas possible : j'ai fait le truc vite fait, pour voir si en gros, ca marchait.
En fait j'hésite encore entre une programmation bete et méchante , c'est a dire a chaque étape, un tableau stockant les valeurs de position pour chacun des 12servos, et une programmation plus proche du 'bio', en liant chaque element a l'autre par une suite logique ( tel commande sur tel element entraine une reaction + tel commande sur tel autre .., 'a la maniere des pattes d'un mille patte..')
Pour ce qui est de la force sur les servos,j'ai moi aussi fait ton calcul : le poids total sur 3 pieds = poids/3 a gerer pour un servo, mais ca n'est au final pas si simple : quand tu es en appui sur les 2 pattes gauches, et celle du milieu droite, par exemple, tu te retrouve avec deux pattes pour supporter d'un cote, et une seule de l'autre : du coup, la patte droite, seule, doit 'lever' le poids de la patte droite avant + droite arriere (cad son coté)+ 1/3 de la masse des cartes+platine. a l'opposé, les 2 pattes n'ont qu'a 'lever' 1 patte , celle du milieu gauche , +1/3 de la masse cartes+platine.
tout se passe bien tant que tu ne fais pas aller trop a l'horizontale le bout de la patte (question de vecteurs de force, of course..), mais dès que la fameuse patte seule prends un peu de retard (parcequ'elle 'force' plus), l'ensemble se déséquilibre, et de plus en plus de poids se retrouve sur elle.... et a l'arrivée, ce servo force bcp plus que les 2 autres a l'opposé.Le montage approximatif 'en hauteur' défavorise encore plus l'equilibrage et accélère l'apparition du phénomeme.
D'ou la modif que j'envisage , de manière a avoir une araignée sure de ses mouvements.
En fait, en laissant les pattes dans l'état actuel, je ne pourrais pas , non plus, faire d'autres essais de locomotion (par exemple, sur 4 pattes en utilisant les 2 autres comme equilibreurs, a la maniere d'une tete+ queue de lézard, ou encore marcher de traver, comme un crabe), par faute de puissance disponible et nécéssaire sur ces pattes.
Le glissement a été résolu par l'ajout de mini patins en caoutchouc collés aux extrémités des pattes et cette partie n'a pas posé de problemes.
37 sont visibles, 19 sont cachés
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
#35
Leon
-
- Membres
-
- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 13 septembre 2009 - 01:25
Salut Eihis,
Si j'ai bien compris, tu alimentes tes servos en 5V (désolé de te parler toujours du même sujet).
Si c'est ça, il y a un moyen très simple de les rendre plus puissants: les alimenter à leur tension maxi (6,5 ou 7V selon les servos). Alimentés avec une tension élevée, ils devraient moins peiner, du coup être plus à l'aise, et consommer moins! Ca peut paraitre étonnant, mais c'est vrai! Un servo à la peine, proche du blocage, consommera plus (et chauffera plus) qu'un servo qui a une bonne réserve de force.
Tu peux donc ajouter 2 résistances dans la partie 'lecture de tension' de ton régulateur (diviseur de tension), pour réguler à 6,5 ou 7V, au lieu de 5V. Ton transistor "poubelle à watt" s'échauffera moins pour 2 raisons: chute de tension plus faible, et aussi courant plus faible!
ATTENTION: Il faut savoir que la tension annoncée à l'amateur de modélisme n'est pas exprimée en tension réelle, mais en tension équivalente à un nombre d'accus. Ainsi, un servo annoncé à 6V maxi doit en fait se comprendre comme acceptant au maxi 5 éléments 1.2V (NiMh ou NiCd), et donc accepte une tension maxi de 7V (accu complètement chargé). Tu ne prend donc pas beaucoup de risque en les alimentant à 7V. Je ne connais pas de servo incompatibles d'une telle tension.
Leon.
Si j'ai bien compris, tu alimentes tes servos en 5V (désolé de te parler toujours du même sujet).
Si c'est ça, il y a un moyen très simple de les rendre plus puissants: les alimenter à leur tension maxi (6,5 ou 7V selon les servos). Alimentés avec une tension élevée, ils devraient moins peiner, du coup être plus à l'aise, et consommer moins! Ca peut paraitre étonnant, mais c'est vrai! Un servo à la peine, proche du blocage, consommera plus (et chauffera plus) qu'un servo qui a une bonne réserve de force.
Tu peux donc ajouter 2 résistances dans la partie 'lecture de tension' de ton régulateur (diviseur de tension), pour réguler à 6,5 ou 7V, au lieu de 5V. Ton transistor "poubelle à watt" s'échauffera moins pour 2 raisons: chute de tension plus faible, et aussi courant plus faible!
ATTENTION: Il faut savoir que la tension annoncée à l'amateur de modélisme n'est pas exprimée en tension réelle, mais en tension équivalente à un nombre d'accus. Ainsi, un servo annoncé à 6V maxi doit en fait se comprendre comme acceptant au maxi 5 éléments 1.2V (NiMh ou NiCd), et donc accepte une tension maxi de 7V (accu complètement chargé). Tu ne prend donc pas beaucoup de risque en les alimentant à 7V. Je ne connais pas de servo incompatibles d'une telle tension.
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
#36
eihis
-
- Membres
- 63 messages
Membre
- Gender:Male
- Location:bordeaux
Posté 21 septembre 2009 - 12:13
yo Léon, merci pour ces idées !
voila un petit résumé de l'avancement :
j'ai fait une premiere modif des pattes avec une bielette pour demultiplier, en passant le servo a un rapport grosso modo de 2:1 .
Mais il m'a fallu quelque temps avant de trouver la visserie plastique obligatoire, car cette modif alourdissait trop la patte, si l'on comparait le 'gain' de poids avec le gain en puissance.
J'ai enfin trouvé ces vis, ce qui va me permettre de passer de 10g (poids d'une vis) + 6g (poids d'une bielette plastique + sa visserie) = 16g au total , a environ 9 grammes , par patte.
En effet le surpoids de la modif agit négativement sur le chassis + l'axe des servos 'horizontaux' qui n'est pas doublé. il me faut donc compenser le poids de la modif.
La chasse aux kilos étant terminée puisque j'ai trouvé mes vis plastiques, il me reste a réorganiser la patte.
en fait, je vais compenser plus encore le surpoids en recentrant la masse de la patte.
actuellement, le poids du servo 'vertical' se trouve 'portant' sur l'extremite, et ca pese sur l'axe du servo 'horizontal', quand la patte est en position 'relevée'.
Je vais donc repositioner ce servo vertical au dessus du servo horizontal, plus proche de l'axe, pour limiter l'effet de levier.
la physionomie de la bete s'en trouvera modifiée : les pattes vont devenir plus fines et legeres, avec un centre de gravité regroupé.
Ceci vient en accord avec mon constat suite aux premiers essais : utiliser 6 pattes = 12servos consomme beaucoup, pour une efficience finallement assez mauvaise (autant utiliser des roues pour se déplacer).
D'autant plus qu'actuellement, la 'garde au sol' de l'engin est tellement faible ( pas plus de 3cm) que les pattes n'apportent aucun avantage comparé a des roues, dans le cas d'un franchissement d'obstacle.
Le fait de rallonger et affiner les pattes devrait en partie améliorer ces points qui me chagrinent.
Du coté electronique, un dilemme s'impose.
j'ai noirci des kilos de papier et l'un dans l'autre, en calculant et recalculant (cout des circuits) , je pense que je vais finallement dédier le pic18f452 a la tache unique de controle des 16 servos + l'acquisition des signaux entrant ( CA/N + décodage ) , en le dotant d'un port E/S acceptant un ensemble de commandes.
L'un dans l'autre, le pic + 1 quartz + 2capas coutera toujours moins cher que n'importe quel montage avec CIs pour gerer le pwm de 16 servos.
En fait, le pic se comportera comme un élément esclave, répondant a un ensemble de commandes envoyées par le systeme 'logique' de la bete : une sorte de centre d'E/S piloté par des commandes simples :"avancer X pas, reculer X pas, tourner X degrés ,Lecture ANA CHAN-n°X ,Reinit etc ".
Ca oblige a refondre la carte de controle , pour ne garder que le MUX 16->1 analogique pour le CA/N ( le pic possede 8 entrées A/N , mais 7 d'entre elles seront déja utilisées pour d'autre taches, en mode logique), mais ca simplifiera la tache pour le centre 'logique' futur, qui n'aura qu'un set de commance réduit mais puissant a disposition ( gain de mémoire et facilité de programmation)
Voila ou j'en suis !
Dans 4 jours je pars en tunisie 1 semaines , je l'ai mérité (lol) - ca va faire un break dans mon squatt du forum.
@bientot !
voila un petit résumé de l'avancement :
j'ai fait une premiere modif des pattes avec une bielette pour demultiplier, en passant le servo a un rapport grosso modo de 2:1 .
Mais il m'a fallu quelque temps avant de trouver la visserie plastique obligatoire, car cette modif alourdissait trop la patte, si l'on comparait le 'gain' de poids avec le gain en puissance.
J'ai enfin trouvé ces vis, ce qui va me permettre de passer de 10g (poids d'une vis) + 6g (poids d'une bielette plastique + sa visserie) = 16g au total , a environ 9 grammes , par patte.
En effet le surpoids de la modif agit négativement sur le chassis + l'axe des servos 'horizontaux' qui n'est pas doublé. il me faut donc compenser le poids de la modif.
La chasse aux kilos étant terminée puisque j'ai trouvé mes vis plastiques, il me reste a réorganiser la patte.
en fait, je vais compenser plus encore le surpoids en recentrant la masse de la patte.
actuellement, le poids du servo 'vertical' se trouve 'portant' sur l'extremite, et ca pese sur l'axe du servo 'horizontal', quand la patte est en position 'relevée'.
Je vais donc repositioner ce servo vertical au dessus du servo horizontal, plus proche de l'axe, pour limiter l'effet de levier.
la physionomie de la bete s'en trouvera modifiée : les pattes vont devenir plus fines et legeres, avec un centre de gravité regroupé.
Ceci vient en accord avec mon constat suite aux premiers essais : utiliser 6 pattes = 12servos consomme beaucoup, pour une efficience finallement assez mauvaise (autant utiliser des roues pour se déplacer).
D'autant plus qu'actuellement, la 'garde au sol' de l'engin est tellement faible ( pas plus de 3cm) que les pattes n'apportent aucun avantage comparé a des roues, dans le cas d'un franchissement d'obstacle.
Le fait de rallonger et affiner les pattes devrait en partie améliorer ces points qui me chagrinent.
Du coté electronique, un dilemme s'impose.
j'ai noirci des kilos de papier et l'un dans l'autre, en calculant et recalculant (cout des circuits) , je pense que je vais finallement dédier le pic18f452 a la tache unique de controle des 16 servos + l'acquisition des signaux entrant ( CA/N + décodage ) , en le dotant d'un port E/S acceptant un ensemble de commandes.
L'un dans l'autre, le pic + 1 quartz + 2capas coutera toujours moins cher que n'importe quel montage avec CIs pour gerer le pwm de 16 servos.
En fait, le pic se comportera comme un élément esclave, répondant a un ensemble de commandes envoyées par le systeme 'logique' de la bete : une sorte de centre d'E/S piloté par des commandes simples :"avancer X pas, reculer X pas, tourner X degrés ,Lecture ANA CHAN-n°X ,Reinit etc ".
Ca oblige a refondre la carte de controle , pour ne garder que le MUX 16->1 analogique pour le CA/N ( le pic possede 8 entrées A/N , mais 7 d'entre elles seront déja utilisées pour d'autre taches, en mode logique), mais ca simplifiera la tache pour le centre 'logique' futur, qui n'aura qu'un set de commance réduit mais puissant a disposition ( gain de mémoire et facilité de programmation)
Voila ou j'en suis !
Dans 4 jours je pars en tunisie 1 semaines , je l'ai mérité (lol) - ca va faire un break dans mon squatt du forum.
@bientot !
37 sont visibles, 19 sont cachés
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
#37
eihis
-
- Membres
- 63 messages
Membre
- Gender:Male
- Location:bordeaux
Posté 13 décembre 2009 - 04:56
Après quelque temps passés a chercher et tester diverses possibilités pour un mouvement 'a pattes' économe, je me suis arreté sur la mécanique de Theo Jansen.
Je dois dire que les premiers résultats sont hyper encourageants, en terme de consommation d'energie,de robustesse, et de rapidité.
J'ai pondu un article complet sur un prototype (et c'est vraiment un proto !) de chassis a 4 jambes 'Jansen' avec un moteur modelcraft a reducteur 30:1, visible sur mon blog ( photos , et videos [ augmenter la luminosité sur les videos dans le player windows média ] )
http://blog.eihis.com/?p=43
commentaires bienvenus.
Je vais plancher maintenant sur une version 'chiadée' et améliorer la souplesse des appuis. @ bientot !
Je dois dire que les premiers résultats sont hyper encourageants, en terme de consommation d'energie,de robustesse, et de rapidité.
J'ai pondu un article complet sur un prototype (et c'est vraiment un proto !) de chassis a 4 jambes 'Jansen' avec un moteur modelcraft a reducteur 30:1, visible sur mon blog ( photos , et videos [ augmenter la luminosité sur les videos dans le player windows média ] )
http://blog.eihis.com/?p=43
commentaires bienvenus.
Je vais plancher maintenant sur une version 'chiadée' et améliorer la souplesse des appuis. @ bientot !
37 sont visibles, 19 sont cachés
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
#38
eihis
-
- Membres
- 63 messages
Membre
- Gender:Male
- Location:bordeaux
Posté 15 décembre 2009 - 06:53
Re bonjour !
Je passe pour poster une petite video visible ici : http://blog.eihis.com/wp-content/uploads/2009/12/4legs_proto_part3.wmv
l'engin , a 4 pattes, pèse 425grammes et consomme 200mA sous 9V avec un unique moteur ( autant dire que comparé a mon six pattes 'bouffeur' de watts... ça confirme mon idée de base qu'il vaut mieux etudier une mécanique pointue pour les mouvements, et limiter ainsi le nombre de moteurs sur un robot )
@+
Je passe pour poster une petite video visible ici : http://blog.eihis.com/wp-content/uploads/2009/12/4legs_proto_part3.wmv
l'engin , a 4 pattes, pèse 425grammes et consomme 200mA sous 9V avec un unique moteur ( autant dire que comparé a mon six pattes 'bouffeur' de watts... ça confirme mon idée de base qu'il vaut mieux etudier une mécanique pointue pour les mouvements, et limiter ainsi le nombre de moteurs sur un robot )
@+
37 sont visibles, 19 sont cachés
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
#39
Leon
-
- Membres
-
- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 15 décembre 2009 - 08:59
Content de te voir de retour...
Jolie réalisation mécanique.
Par contre, j'ai vraiment du mal à comprendre pourquoi tu as laissé tomber le premier robot. J'aurais pensé qu'il offrait plus de possibilités que le nouveau: programmation, optimisation, évolutivité. C'est un peu dommage, mais bon... tu as certainement tes raisons!
Leon.
Jolie réalisation mécanique.
Par contre, j'ai vraiment du mal à comprendre pourquoi tu as laissé tomber le premier robot. J'aurais pensé qu'il offrait plus de possibilités que le nouveau: programmation, optimisation, évolutivité. C'est un peu dommage, mais bon... tu as certainement tes raisons!
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
#40
eihis
-
- Membres
- 63 messages
Membre
- Gender:Male
- Location:bordeaux
Posté 16 décembre 2009 - 10:13
hello léon !
je comprends bien ton interrogation. mon probleme, c'est que j'ai tendance a aller jusqu'au fond des choses.
avec l'araignée a 6 pattes, j'avais un chassis de + de 700grammes, comportant 12 seervos , et un PIC dédié au pilotage du tout.
avec le nouveau proto, j'ai un chassis qui pese actuellement 385 grammes , comportant 1 seul moteur , ne necessitant qu'un pont en H pour le controller..
Ok , il n'y a pas de direction du chassis actuellement, et les mouvements sont dictés par la mécanique des pattes. mais il me semble que cette solution est la plus proche de celle que je cherche pour obtenir un chassis de robot a bas prix, robuste et économe en energie, capable de se déplacer rapidement de facon stable.
La solution pour réduire la consommation sur le 'spider' a 6 pattes, c'etait d'augmenter le couple des servos.Mais on connait le principe -> " plus d'euros = plus de puissance (et parfois en plus, moins de vitesse)".
-> " plus d'euros = plus de puissance (et parfois en plus, moins de vitesse)".
Bien sur, sinon, je peux aussi acheter un kit complet comme celui vu ici : || http://www.robot-maker.com/forum/topic/3095-mon-petit-robot-hexapode/ || ( c'est d'ailleur une des raison pour laquelle j'ai arreté le projet quand j'ai vu la qualité du kit )
Mais ca n'est pas ma philosophie.
Sur le chassis a 4 pattes, le moteur a reducteur 30:1 a couté dans les 12euros. reste une couronne a '90°' en plastique et un pignon dégoté sur un vieux moteur de magnetoscope.
Le reste, c'est du temps en découpage , poncage, percage du plexiglass, et quelque vis de 3mm . bref le tout reste accessible a un amateur sans trop de frais puisque dans l'état actuel , ce 'proto' coute dans les 25 euros tout compris.
Je suis en train de réfléchir a une solution pour les changements de direction, et d'amortissement pour l'augmentation de la vitesse de marche.
L'electronique ne me rebute pas, bien entendu, mais je pense qu'elle doit etre dédiée au systeme de gestion ( 'cerveau') du robot, plutot qu'a des taches qui peuvent etre gérées par des solutions simples et moins couteuses ( sur le spider 6 , un PIC complet devait etre dédié a la gestion des signaux de commande servos ! ).
Finallement, disons que je suis assez proche de la philosophie des robots 'B.E.A.M'
Si une patte est capable de faire le mouvement 'avant' ou 'arriere' par un unique montage mécanique, alors je suis satisfait.
Notre bras ne fait pas ce que notre jambe fait : sur ce robot, c'est la même chose, et une mécanique de jambe telle que celle de theo jansen remplit exactement (mais uniquement) le role pour lequel elle a été developpée.
Or, si nous courrrons sur nos jambes en non pas sur nos bras, c'est bel et bien parcque nos jambes sont plus efficaces, et mieux adaptées pour la course que nos bras.
Evidemment, la souplesse s'en trouve amputée, mais en fin de compte je me demande si 'la souplesse' existait vraiment : dans le cas du chassis a 6 pattes, a part un mouvement de marche, de contraction ou d'extension et quelque figures de style inutiles, rien ne justifie le nombre de servos et la consommation de l'ensemble.
enfin, c'est tout un débat j'imagine, car tout le monde a sa conception .
en tout cas merci pour ta réponse, et @ bientot !
je comprends bien ton interrogation. mon probleme, c'est que j'ai tendance a aller jusqu'au fond des choses.
avec l'araignée a 6 pattes, j'avais un chassis de + de 700grammes, comportant 12 seervos , et un PIC dédié au pilotage du tout.
avec le nouveau proto, j'ai un chassis qui pese actuellement 385 grammes , comportant 1 seul moteur , ne necessitant qu'un pont en H pour le controller..
Ok , il n'y a pas de direction du chassis actuellement, et les mouvements sont dictés par la mécanique des pattes. mais il me semble que cette solution est la plus proche de celle que je cherche pour obtenir un chassis de robot a bas prix, robuste et économe en energie, capable de se déplacer rapidement de facon stable.
La solution pour réduire la consommation sur le 'spider' a 6 pattes, c'etait d'augmenter le couple des servos.Mais on connait le principe
-> " plus d'euros = plus de puissance (et parfois en plus, moins de vitesse)".Bien sur, sinon, je peux aussi acheter un kit complet comme celui vu ici : || http://www.robot-maker.com/forum/topic/3095-mon-petit-robot-hexapode/ || ( c'est d'ailleur une des raison pour laquelle j'ai arreté le projet quand j'ai vu la qualité du kit )
Mais ca n'est pas ma philosophie.
Sur le chassis a 4 pattes, le moteur a reducteur 30:1 a couté dans les 12euros. reste une couronne a '90°' en plastique et un pignon dégoté sur un vieux moteur de magnetoscope.
Le reste, c'est du temps en découpage , poncage, percage du plexiglass, et quelque vis de 3mm . bref le tout reste accessible a un amateur sans trop de frais puisque dans l'état actuel , ce 'proto' coute dans les 25 euros tout compris.
Je suis en train de réfléchir a une solution pour les changements de direction, et d'amortissement pour l'augmentation de la vitesse de marche.
L'electronique ne me rebute pas, bien entendu, mais je pense qu'elle doit etre dédiée au systeme de gestion ( 'cerveau') du robot, plutot qu'a des taches qui peuvent etre gérées par des solutions simples et moins couteuses ( sur le spider 6 , un PIC complet devait etre dédié a la gestion des signaux de commande servos ! ).
Finallement, disons que je suis assez proche de la philosophie des robots 'B.E.A.M'
Si une patte est capable de faire le mouvement 'avant' ou 'arriere' par un unique montage mécanique, alors je suis satisfait.
Notre bras ne fait pas ce que notre jambe fait : sur ce robot, c'est la même chose, et une mécanique de jambe telle que celle de theo jansen remplit exactement (mais uniquement) le role pour lequel elle a été developpée.
Or, si nous courrrons sur nos jambes en non pas sur nos bras, c'est bel et bien parcque nos jambes sont plus efficaces, et mieux adaptées pour la course que nos bras.
Evidemment, la souplesse s'en trouve amputée, mais en fin de compte je me demande si 'la souplesse' existait vraiment : dans le cas du chassis a 6 pattes, a part un mouvement de marche, de contraction ou d'extension et quelque figures de style inutiles, rien ne justifie le nombre de servos et la consommation de l'ensemble.
enfin, c'est tout un débat j'imagine, car tout le monde a sa conception .
en tout cas merci pour ta réponse, et @ bientot !
37 sont visibles, 19 sont cachés
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
Sachez qu'il y a seulement 10 types de personnes : ceux qui comprennent le binaire et les autres.
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users





{kind=link}