Concernant les connecteurs de la carte Arduino, je ne les ai pas encore vu, je m'y interesse pas, mais tu peux trouver en magasin de connectique/electronique tous les types de connecteurs possibles, aussi bien males que femelles donc essaie, regarde par exemple chez electronique-diffusion (google^^).
Une vraie plaque d'essai c'est une plaque de marque LABDEC (voir google)
Après ce que des gens nomment une plaque d'essai (alors que c'est faux) c'est une plaque de circuit imprimé pastillée ou à bandes du type Véroboard.
Pour ce qui est de la plaque d'essais ça dépend ce que tu entend par plaque d'essais, je vois pas l'intéret d'une plaque d'ailleurs pour juste alimenter les servos, explique toi plus.

Projet robot Bipède 8 servos
Débuté par Wotan_20, févr. 17 2010 09:16
26 réponses à ce sujet
#21

Electron
-

- Membres
-

- 906 messages
Pilier du forum
- Gender:Male
- Location:LABEGE
- Interests:Électronique, robotique ludique, programmation de jeux et utilitaires, et plein d'autres choses.
Posté 21 février 2010 - 12:36
"Plus on partage, plus on possède, voilà le miracle". LEONARD NIMOY
"Celui qui se bat peut perdre, celui qui ne se bat pas a déjà tout perdu". BERTOLT BRECHT (1898-1956)
Comment se lancer dans la robotique !
Mince encore un post pour augmenter mon compteur 
#22
Inounx
-

- Membres
- 111 messages
Membre
- Gender:Male
- Location:Toulouse
Posté 21 février 2010 - 12:47
" Pour l'alimentation de mes 8 servomoteurs, à partir de la carte Arduino, j'avais pensé à une plaque d'essais, mais j'ai peur que sa prenne de la place sur le robot, voyez vous un autre moyen ou la plaque d'essais est une bonne solution???
La plaque d'essai c'est bien pour te mettre au point au début. Mais c'est sûr que par la suite sa va pas aller ton robot ne va pas se trimballer la carte comme ça ^^, c'est trop gros. Le meilleur moyen (mais pas le plus simple) à mon avis et surtout pour un bipède serai de te faire un arduino shield avec des connecteurs pour seromoteur et une alim externe (ton arduino n'est pas prévue pour alimenter 8 servomoteurs).
Car pour le moment je teste avec un servomoteur qui avait une prise femelle et j'ai modifier en cassant la prise femelle, séparé les fil et j'ai branché à l'arrache les fil dans les broches de la carte Arduino, mais sa à du mal à rentré et à tenir, existe-t-il des embouts adaptable pour la carte arduino??? "
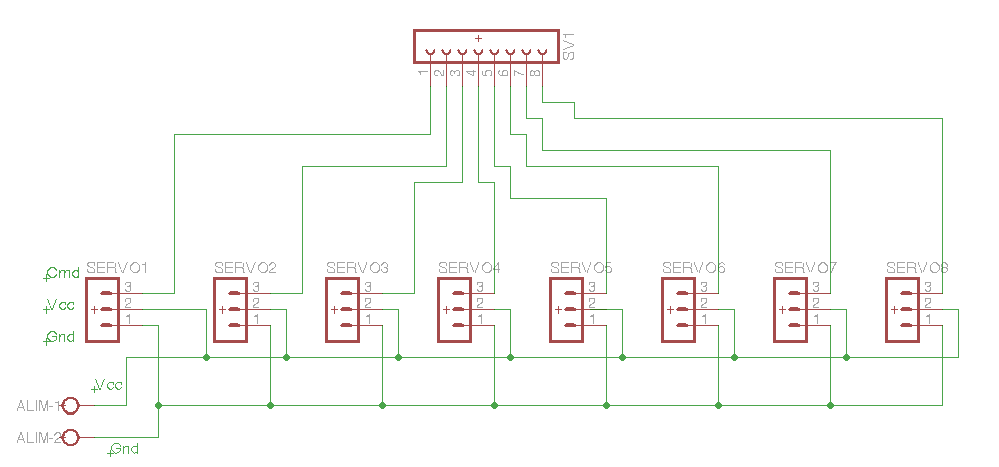
C'est vrai que c'est galère à brancher quand on a pas les bons connecteurs. Il existe des barettes de connecteurs males qui vont parfaitement bien avec ces prises là comme celles de l'arduino ou des servo : Barette sécable ça ce trouve dans n'importe quel magasin revendeur d'électronique. Moyennant un peu de soudure et quelques bouts de nappe tu peux facilement faire des connecteurs mâle / mâle pour relier tes servos à l'arduino. Le plus embêtant ce sont les alims de tout tes servos.
Il te faudrait une carte venant se "ficher" sur l'arduino ayant un schéma similaire à sa :
Image(s) jointe(s)
Mon blog : InounxProjects - Projet en cours : Robert
"All the world's a stage, And all the men and women merely players." - William Shakespeare
"All the world's a stage, And all the men and women merely players." - William Shakespeare
#23
Electron
-
- Membres
-
- 906 messages
Pilier du forum
- Gender:Male
- Location:LABEGE
- Interests:Électronique, robotique ludique, programmation de jeux et utilitaires, et plein d'autres choses.
Posté 21 février 2010 - 02:13
Progresse seul sur google quand tu peux, il y a des choses que tu peux apprendre seul, car les gens ne sont pas là pour mener ton projet de A à Z avec toi mais à te préiciser un truc que tu as pas compris, ceci dit, il faut déjà que tu aie appris la base, sinon on va pas en sortir^^
Allez je te mâche le travail, tu as des liens là, suis-les dans l'ordre si tu veux te développer en robotique.
http://www.robot-maker.com/forum/topic/3300-se-developper-en-robotique-ludique-de-a-a-z/page__view__getnewpost
Allez je te mâche le travail, tu as des liens là, suis-les dans l'ordre si tu veux te développer en robotique.
http://www.robot-maker.com/forum/topic/3300-se-developper-en-robotique-ludique-de-a-a-z/page__view__getnewpost
"Plus on partage, plus on possède, voilà le miracle". LEONARD NIMOY
"Celui qui se bat peut perdre, celui qui ne se bat pas a déjà tout perdu". BERTOLT BRECHT (1898-1956)
Comment se lancer dans la robotique !
Mince encore un post pour augmenter mon compteur
#24
Wotan_20
-
- Membres
- 11 messages
Nouveau membre
Posté 22 février 2010 - 07:02
Merci INOUNX, je vais potasser ça avec le plus grand intérêt avant de me décider!!! 
Sinon Electron, je n'ai pas envie que vous me fassiez le boulot à ma place, mais me lancer dans ce projet et ne tinkiet pas j'en ai passer et j'en passe toujours du temps sur le net pour me renseigner avant de vous demander, mais c'est que je suis un vrai débutant et je vous remercie à tous de m'aider et je vais bien étudier tes liens, car c'est vraiment un domaine que j'aimerais vraiment maitriser comme vous, car vous m'avez donner l'envie de voir plus loin que ce projet!!!
Sinon pour m'expliquer un peut plus sur le plaque d'essais, c'est une plaque que j'ai vu sur internet ou il n'y à pas besoin de soudure(une sorte de bornier), mais je vais plutôt opter pour l'idée de INOUNX!
Sinon Electron, je n'ai pas envie que vous me fassiez le boulot à ma place, mais me lancer dans ce projet et ne tinkiet pas j'en ai passer et j'en passe toujours du temps sur le net pour me renseigner avant de vous demander, mais c'est que je suis un vrai débutant et je vous remercie à tous de m'aider et je vais bien étudier tes liens, car c'est vraiment un domaine que j'aimerais vraiment maitriser comme vous, car vous m'avez donner l'envie de voir plus loin que ce projet!!!
Sinon pour m'expliquer un peut plus sur le plaque d'essais, c'est une plaque que j'ai vu sur internet ou il n'y à pas besoin de soudure(une sorte de bornier), mais je vais plutôt opter pour l'idée de INOUNX!
#25
Electron
-
- Membres
-
- 906 messages
Pilier du forum
- Gender:Male
- Location:LABEGE
- Interests:Électronique, robotique ludique, programmation de jeux et utilitaires, et plein d'autres choses.
Posté 22 février 2010 - 09:48
C'est aussi dans le dernier lien que je t'ai donnéSinon pour m'expliquer un peut plus sur le plaque d'essais, c'est une plaque que j'ai vu sur internet ou il n'y à pas besoin de soudure(une sorte de bornier),
J'espère que tu iras loin avec nous puis tout seul
"Plus on partage, plus on possède, voilà le miracle". LEONARD NIMOY
"Celui qui se bat peut perdre, celui qui ne se bat pas a déjà tout perdu". BERTOLT BRECHT (1898-1956)
Comment se lancer dans la robotique !
Mince encore un post pour augmenter mon compteur
#26
Wotan_20
-
- Membres
- 11 messages
Nouveau membre
Posté 10 mai 2010 - 08:56
Bonjours à tous,
J'ai enfin pu monter mon robot bipède, j'ai aussi réussi à le faire marcher. Mon programme pour faire avancer mon robot bipède est le suivant, mais j'aimerais pouvoir contrôler la vitesse des servomoteurs, pouvez-vous me l'expliquer et me le rajouter à mon programme comme exemple???
MERCI!
Voici mon programme:
//Robot avance droit et revient en position initiale
#include <Servo.h>
Servo servo1;
Servo servo2;
Servo servo3;
Servo servo4;
void setup()
{
servo1.attach(3);
servo2.attach(9);
servo3.attach(12);
servo4.attach(6);
//mettre le robot en position initiale
servo3.writeMicroseconds(1555);
servo4.writeMicroseconds(1575);
servo1.writeMicroseconds(1595);
servo2.writeMicroseconds(1595);
delay(2000);
//bascule sur le pied gauche
servo1.writeMicroseconds(1200);
servo2.writeMicroseconds(1400);
delay(1000);
//avance du pied droit
servo3.writeMicroseconds(1765);
servo4.writeMicroseconds(1810);
delay(1000);
//pied droit avancé et posé
servo1.writeMicroseconds(1595);
servo2.writeMicroseconds(1595);
delay(1000);
//bascule sur pied droit
servo1.writeMicroseconds(1750);
servo2.writeMicroseconds(1750);
delay(1000);
//avance du pied gauche
servo3.writeMicroseconds(1295);
servo4.writeMicroseconds(1295);
delay(1000);
//pied gauche avancé et posé
servo1.writeMicroseconds(1595);
servo2.writeMicroseconds(1595);
delay(1000);
//bascule sur le pied gauche
servo1.writeMicroseconds(1200);
servo2.writeMicroseconds(1400);
delay(1000);
//avance du pied gauche pour se remettre en position initiale
servo3.writeMicroseconds(1555);
servo4.writeMicroseconds(1575);
delay(1000);
//pied gauche avancé et posé, le robot est revenu en position initiale
servo1.writeMicroseconds(1595);
servo2.writeMicroseconds(1595);
delay(1000);
}
void loop() {}
J'ai enfin pu monter mon robot bipède, j'ai aussi réussi à le faire marcher. Mon programme pour faire avancer mon robot bipède est le suivant, mais j'aimerais pouvoir contrôler la vitesse des servomoteurs, pouvez-vous me l'expliquer et me le rajouter à mon programme comme exemple???
MERCI!
Voici mon programme:
//Robot avance droit et revient en position initiale
#include <Servo.h>
Servo servo1;
Servo servo2;
Servo servo3;
Servo servo4;
void setup()
{
servo1.attach(3);
servo2.attach(9);
servo3.attach(12);
servo4.attach(6);
//mettre le robot en position initiale
servo3.writeMicroseconds(1555);
servo4.writeMicroseconds(1575);
servo1.writeMicroseconds(1595);
servo2.writeMicroseconds(1595);
delay(2000);
//bascule sur le pied gauche
servo1.writeMicroseconds(1200);
servo2.writeMicroseconds(1400);
delay(1000);
//avance du pied droit
servo3.writeMicroseconds(1765);
servo4.writeMicroseconds(1810);
delay(1000);
//pied droit avancé et posé
servo1.writeMicroseconds(1595);
servo2.writeMicroseconds(1595);
delay(1000);
//bascule sur pied droit
servo1.writeMicroseconds(1750);
servo2.writeMicroseconds(1750);
delay(1000);
//avance du pied gauche
servo3.writeMicroseconds(1295);
servo4.writeMicroseconds(1295);
delay(1000);
//pied gauche avancé et posé
servo1.writeMicroseconds(1595);
servo2.writeMicroseconds(1595);
delay(1000);
//bascule sur le pied gauche
servo1.writeMicroseconds(1200);
servo2.writeMicroseconds(1400);
delay(1000);
//avance du pied gauche pour se remettre en position initiale
servo3.writeMicroseconds(1555);
servo4.writeMicroseconds(1575);
delay(1000);
//pied gauche avancé et posé, le robot est revenu en position initiale
servo1.writeMicroseconds(1595);
servo2.writeMicroseconds(1595);
delay(1000);
}
void loop() {}
#27
MaD-WolF
-

- Membres
- 59 messages
Membre
- Gender:Male
Posté 11 mai 2010 - 09:17
Bonjours à tous,
J'ai enfin pu monter mon robot bipède, j'ai aussi réussi à le faire marcher. Mon programme pour faire avancer mon robot bipède est le suivant, mais j'aimerais pouvoir contrôler la vitesse des servomoteurs, pouvez-vous me l'expliquer et me le rajouter à mon programme comme exemple???
je ne sais pas modifier le vitesses des servos de manière simple ni si c'est possible car seul un ordre de position lui est envoyé, mais tu peux modifier la vitesse globale du robot en changeant les valeurs des delays.
Sinon une autres solution c'est de découper les ordres que tu donnes aux servos. Au lieux de "va de 0° à 90°" tu peux lui demander "va à 5° attends 2ms puis va à 10° attends 2ms etc".
Attention N00B dangereux !!








1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users





{kind=link}