

 Ce sujet est fermé
Ce sujet est fermé
pour les administrateurs : je comprends votre mesure étant donné les réactions inattendues sur le sujet "Caliban avance à vitesse grand V", et je les regrette sans autres commentaires. Vous avez eu raison de tout reformater, par contre vous auriez pu vous contenter de supprimer le passage concerné, histoire de ne pas avoir à reposter un nouveau topic
 Si j'avais su que ça ferait un chari-vari pareil, je n'aurais pas posté l'article sans les illustrations explicites...
Si j'avais su que ça ferait un chari-vari pareil, je n'aurais pas posté l'article sans les illustrations explicites...Re-voici donc l'article avec tout ce qu'il faut, par contre je n'ai pas pu modifier les photos de profil, çar je les ai reçues en lecture seule, je m'en excuse d'avance même si ça ne devrait pas beaucoup gêner

Aux autres membres du forum : je rappelle au cas où que j'ai posté ce sujet dans le simple but d'informer sur un évènement qui fait du bien à la robotique amateur et aussi avec l'objectif de donner des indications assez précises sur un club dont l'un des principaux membres fait d'ailleurs partie de Robot-passion. Je suis allée sur place et croyez-moi, ça valait le coup. Je n'ai pas d'autres buts que de faire partager cette expérience, et si vous avez des questions ou des critiques, liées notamment à l'insuffisance de mes informations, c'est d'abord à moi qu'elles s'adressent et pas à Caliban, sauf en ce qui concerne les détails techniques des robots bien entendu

Sur ce, bonne lecture !
Bonjour tout le monde
Voici pour tous les nouveaux membres, ceux qui ne connaissent pas (encore) Caliban et les autres, une petite présentation "en bref" des dernières avancées des projets du club, suite à une rencontre passionnante à la Japan Expo.
En effet, depuis quelques années déjà, la Japan Expo possède toute une section de stands de robotiques qui font la part belle aux écoles d'ingénieurs, à Planète Sciences et aux clubs amateurs (dont Caliban fait partie).
(Eh oui, la Japan, ce n'est pas que pour les fous de mangas et de jeux vidéos, plus maintenant du moins
).C'est la toute première fois (je crois
) que Caliban nous fait l'honneur de dresser un stand avec ses trois principaux projets et leurs créateurs venus de tous horizons et de toutes spécialités, y compris artistiques (quelques planches de dessin de l'un des membres faisaient partie de l'expo). Les photos des robots et de certaines pièces détachées sont incluses. Ne vous inquiétez pas si certaines photos apparaissent noires en miniature, le lien fonctionne dès qu'on clique dessus. Les membres de Caliban association étaient d'ailleurs toujours en train d'avancer sur leur dernier modèle, tout en assurant la promo du club.
 Je rappelle que leur club a pour but de faire sortir la robotique de haut niveau des sphères hermétiques et relativement (peu) productives des laboratoires pour montrer qu'il est tout à fait possible de créer au fur et à mesure un véritable androïde digne de ce nom, pour "peu" qu'on s'en donne la motivation, la persévérance et...la passion
Je rappelle que leur club a pour but de faire sortir la robotique de haut niveau des sphères hermétiques et relativement (peu) productives des laboratoires pour montrer qu'il est tout à fait possible de créer au fur et à mesure un véritable androïde digne de ce nom, pour "peu" qu'on s'en donne la motivation, la persévérance et...la passion 
Voici d'abord leur projet le plus récent et toujours en cours d'évolution : Cybrina, la "bombe" robote du club (sans rancune, hein, Calibanproject
 )
)
- ses créateurs ont commencé l'an dernier avec une paire d'yeux. Maintenant, la nouvelle Maria mécanique est pourvue d'un visage tout à fait design, de bras et de jambes maintenus par un buste (recouvert d'une coque "bien moulée", pour le plaisir des yeux masculins en particulier
 )
)- elle est capable de reconnaître les visages, d'effectuer certains mouvements et... de présenter une émission télé (cf ici...)
- la paire de jambes n'est qu'assemblée pour l'instant, tout reste à faire pour assurer la marche bipède (allez courage !)
- les bras ont leurs coques, mais pas encore de mains : elles étaient en cours de réalisation et d'assemblage sur le stand (j'ai une photo gardée au frais de la première main assemblée, rien que pour vous !)
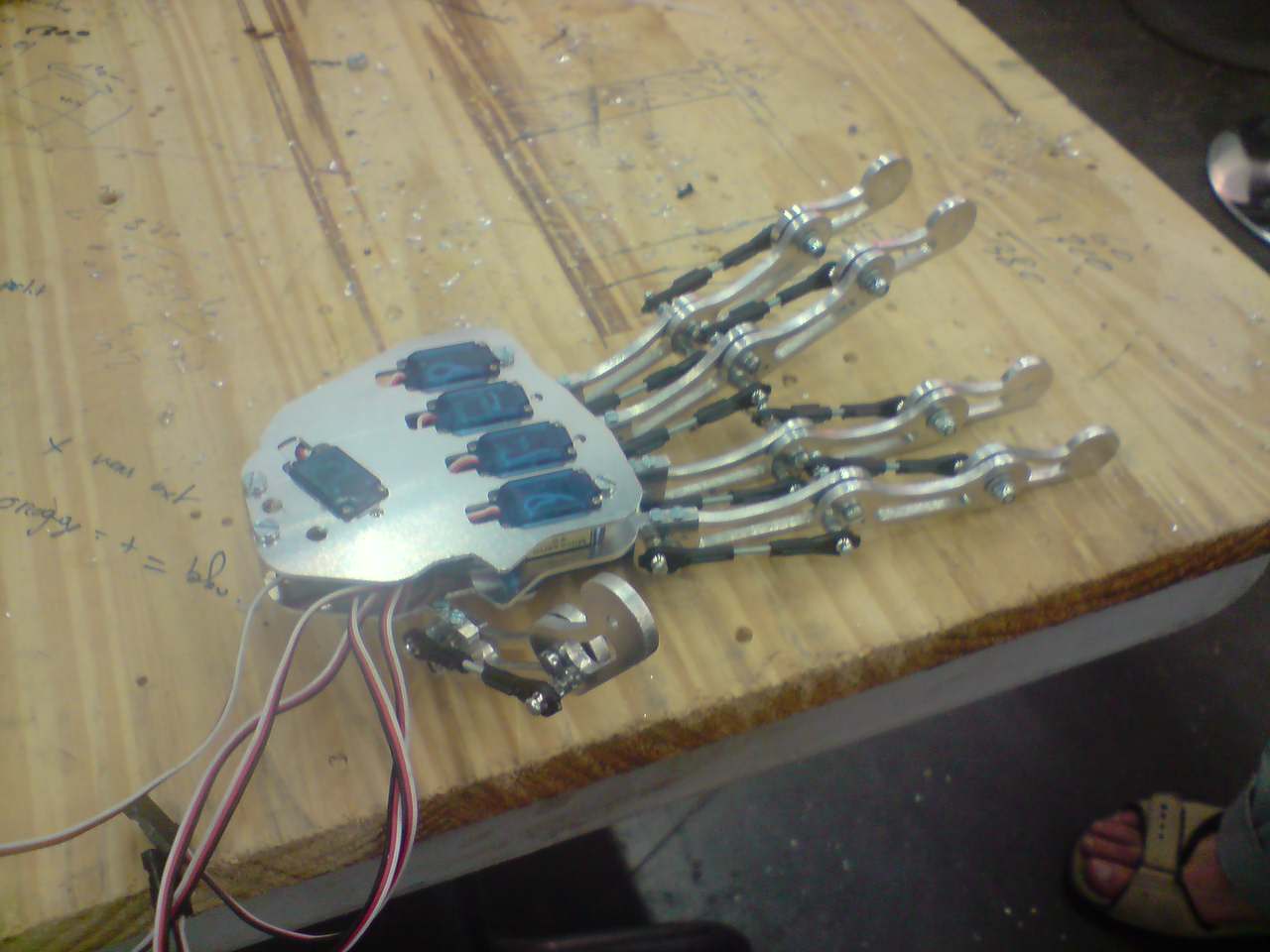
si on compare avec une main humaine, on se rend compte que les dimensions sont vraisemblables :

- toutes les coques sont créées "maison", d'après ce que j'ai compris
Cette jeune robote en pleine croissance était accompagnée de ses prédécesseurs, à savoir le charismatique Darwin "toujours là pour vous servir" (c'est un robot conçu pour servir les gens à table, il peut même se baisser pour ramasser les objets et se redresser pour les ranger)le voici :


et bien sûr, le vénérable ancêtre Caliban, la mascotte du club qui est toujours là pour encourager ses créateurs.
J'en profite pour vous transmettre les liens vers l'association Caliban, dont ce forum dit à juste titre qu'elle est "à ne pas rater" :
forum de discussion : http://forum.caliban-web.com/
site internet : http://www.association.caliban-web.com/
mail : association@caliban-web.com
Parce que ça fait PLAISIR de voir un club amateur progresser si vite et si bien, et qui EN PLUS se donne la peine de se déplacer pour le grand public. En voilà, des passionnés, qui continuaient de bosser sur place, de surcroît, parce que chaque instant compte, mais restaient totalement ouverts et disponibles pour le plus grand régal des curieux(ses
) et autres passionné(e)s.Chapeau les artistes !






















