
pppfffff bon je crois avoir detecter mon problème ton dernier code ne marchant toujours pas, je reessayais avec des servos futaba standard 3003 et là ça marche, alors que je faisais les derniers essais avec des servos apparement digitaux et avec eux ça ne marche pas, (ces mini http://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=6608 )par contre avec ces servos digitaux, les premiers codes que j'utilisais du type for(pos = 0; pos < 180; pos += 1) { myservo.write(pos); delay(15); là ça marchait
donc je vais retester avec tes premiers codes de ce matin et mes servos standard futaba
et dans mon pilote, il y a justement 1 servo mini digital et 2 autres vieux mini normaux, on va y arriver

109 réponses à ce sujet
#82

Astondb8
-

- Membres
-

- 1â¯111 messages
Membre chevronné
- Gender:Male
- Location:Paris
Posté 27 décembre 2011 - 02:19
Comme tu veux mais ce n'est pas un problème de code ou analogique ou digitale
Si ça marche avec le 1er code c'est que tu as un PB de batterie et que ton alimentation de délivre pas assez de courant.
Du coup il peut le faire de 1 en 1 et avec du mal. Par contre il ne peut pas envoyer un servo beaucoup plus loin
C'est quoi ton alimentation ?
Si ça marche avec le 1er code c'est que tu as un PB de batterie et que ton alimentation de délivre pas assez de courant.
Du coup il peut le faire de 1 en 1 et avec du mal. Par contre il ne peut pas envoyer un servo beaucoup plus loin
C'est quoi ton alimentation ?
#83
VincentB
-
- Membres
- 50 messages
Membre
- Gender:Male
- Location:Beziers - France
- Interests:Modélisme, planeurs anciens, internet, photo, video...
Posté 27 décembre 2011 - 02:35
j'alimente le bornier bleue avec une nimh 6v 2700mah, là j'ai testé avec une LIFE A123 2S 2300mah, toutes les 2 chargées, j'ai le même problème avec les mini servos digitaux et ton dernier code, mais pas de soucis avec les servo standards futaba
par contre j'ai retesté tes 2 premiers codes de ce matin (dont le 1er avec le code telecommande) mais là ça ne marche pas
j'ai testé aussi en alimentant la carte avec l'usb et aussi avec du 12v sur la Jack avec un accu lipo 3S 2000mah
donc niveau batterie je ne pense pas qu'il y ait un soucis, d'autant que j'utilise ce type de batterie dans mes planeurs avec beaucoup plus de servos
par contre j'ai retesté tes 2 premiers codes de ce matin (dont le 1er avec le code telecommande) mais là ça ne marche pas
j'ai testé aussi en alimentant la carte avec l'usb et aussi avec du 12v sur la Jack avec un accu lipo 3S 2000mah
donc niveau batterie je ne pense pas qu'il y ait un soucis, d'autant que j'utilise ce type de batterie dans mes planeurs avec beaucoup plus de servos
#84
VincentB
-
- Membres
- 50 messages
Membre
- Gender:Male
- Location:Beziers - France
- Interests:Modélisme, planeurs anciens, internet, photo, video...
Posté 27 décembre 2011 - 02:50
e viens de retester avec juste ton code pour 1 servo
et les servo standards futaba marchent bien, alors que les mini numeriques ne marchent pas
#include <Servo.h>
Servo bras;
void setup()
{
bras.attach(3);
}
void loop() {
bras.write(0);
delay(1000);
bras.write(180);
delay(1000);
}et les servo standards futaba marchent bien, alors que les mini numeriques ne marchent pas
#85
VincentB
-
- Membres
- 50 messages
Membre
- Gender:Male
- Location:Beziers - France
- Interests:Modélisme, planeurs anciens, internet, photo, video...
Posté 27 décembre 2011 - 02:55
par contre si je mets des valeurs moins importantes par exemple
là mes mini numeriques marchent, comme si ils n'acceptaient pas les valeurs extremes
#include <Servo.h>
Servo bras;
void setup()
{
bras.attach(3);
}
void loop() {
bras.write(10);
delay(1000);
bras.write(100);
delay(1000);
}là mes mini numeriques marchent, comme si ils n'acceptaient pas les valeurs extremes
#86
Astondb8
-
- Membres
-
- 1â¯111 messages
Membre chevronné
- Gender:Male
- Location:Paris
Posté 27 décembre 2011 - 03:11
Il est possible que tes servos n'ai pas de valeurs d'antan dards 0/180)
Fait des essais avec un servo au élargis petit à petit la plage de leur course.
90/100
90/110
90/120
etc
Puis
80/110
70/120
60//130
Etc
Des que tu vois le servo buter c'est que tu es à la limite
Étant à chaque fois le délais pour qu'il zi le temps d'y aller
Fait des essais avec un servo au élargis petit à petit la plage de leur course.
90/100
90/110
90/120
etc
Puis
80/110
70/120
60//130
Etc
Des que tu vois le servo buter c'est que tu es à la limite
Étant à chaque fois le délais pour qu'il zi le temps d'y aller
#87
Astondb8
-
- Membres
-
- 1â¯111 messages
Membre chevronné
- Gender:Male
- Location:Paris
Posté 27 décembre 2011 - 03:27
Puisque tu dis que cela marche avec des boucles comme le 1er code
Vola n code qu'il fais ce que tu voulais, mas avec des boucles plutot que des envois directs.Mais ce n'est pas normal le code que je t'ai donné marche trex bien chez moi
Vola n code qu'il fais ce que tu voulais, mas avec des boucles plutot que des envois directs.Mais ce n'est pas normal le code que je t'ai donné marche trex bien chez moi
#include <Servo.h>
Servo bras;
Servo tete;
Servo machoire;
int pos1 =0;
int pos2 =0;
int pos3 =0;
void setup()
{
bras.attach(3);
tete.attach(5);
machoire.attach(6);
bras.write(0);
delay(1000);
bras.write(0);
delay(1000);
bras.write(0);
delay(1000);
}
void loop() {
// Bras aller
for(pos1 = 0; pos1 < 50; pos1 += 1)
{
bras.write(pos1);
delay(15);
}
delay(4000); // Attente de 4 secondes
// Bras retour
for(pos1 = 50; pos1>=0; pos2-=1)
{
bras.write(pos1); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
delay(1000); // atte te de 1 seconde
// Tete aller
for(pos2 = 0; pos2 < 90; pos2 += 1)
{
tete.write(pos2);
delay(15);
}
delay(1000); // attente 1 seconde
// Tete retour
for(pos2 = 90; pos1>=60; pos2-=1)
{
tete.write(pos2); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
delay(1000); // attente 1 seconde
// Machoire 1
// Machoire aller
for(pos3 = 0; pos3 < 40; pos3 += 1)
{
machoire.write(pos3);
delay(15);
}
// Machoir retour retour
for(pos1 = 40; pos3>=0; pos3-=1)
{
machoire.write(pos3); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
delay(1000); // atte te de 1 seconde
// Machoire 2
// Machoire aller
for(pos3 = 0; pos3 < 40; pos3 += 1)
{
machoire.write(pos3);
delay(15);
}
// Machoir retour retour
for(pos1 = 40; pos3>=0; pos3-=1)
{
machoire.write(pos3); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
// Machoire 3
// Machoire aller
for(pos3 = 0; pos3 < 40; pos3 += 1)
{
machoire.write(pos3);
delay(15);
}
// Machoir retour retour
for(pos1 = 40; pos3>=0; pos3-=1)
{
machoire.write(pos3); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
// Machoire 4
// Machoire aller
for(pos3 = 0; pos3 < 40; pos3 += 1)
{
machoire.write(pos3);
delay(15);
}
// Machoir retour retour
for(pos1 = 40; pos3>=0; pos3-=1)
{
machoire.write(pos3); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
// Machoire 5
// Machoire aller
for(pos3 = 0; pos3 < 40; pos3 += 1)
{
machoire.write(pos3);
delay(15);
}
// Machoir retour retour
for(pos1 = 40; pos3>=0; pos3-=1)
{
machoire.write(pos3); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
// Machoire 6
// Machoire aller
for(pos3 = 0; pos3 < 40; pos3 += 1)
{
machoire.write(pos3);
delay(15);
}
// Machoir retour retour
for(pos1 = 40; pos3>=0; pos3-=1)
{
machoire.write(pos3); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
// Machoire 7
// Machoire aller
for(pos3 = 0; pos3 < 40; pos3 += 1)
{
machoire.write(pos3);
delay(15);
}
// Machoir retour retour
for(pos1 = 40; pos3>=0; pos3-=1)
{
machoire.write(pos3); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
// Machoire 8
// Machoire aller
for(pos3 = 0; pos3 < 40; pos3 += 1)
{
machoire.write(pos3);
delay(15);
}
// Machoir retour retour
for(pos1 = 40; pos3>=0; pos3-=1)
{
machoire.write(pos3); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
// Machoire 9
// Machoire aller
for(pos3 = 0; pos3 < 40; pos3 += 1)
{
machoire.write(pos3);
delay(15);
}
// Machoir retour retour
for(pos1 = 40; pos3>=0; pos3-=1)
{
machoire.write(pos3); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
// Machoire 10
// Machoire aller
for(pos3 = 0; pos3 < 40; pos3 += 1)
{
machoire.write(pos3);
delay(15);
}
// Machoir retour retour
for(pos1 = 40; pos3>=0; pos3-=1)
{
machoire.write(pos3); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
delay(5000); // atte te de 1 seconde
}
#88
VincentB
-
- Membres
- 50 messages
Membre
- Gender:Male
- Location:Beziers - France
- Interests:Modélisme, planeurs anciens, internet, photo, video...
Posté 27 décembre 2011 - 03:48
si ton premier code de ce matin était celui qui marchait le mieux, j'avais juste le problème qu'a l'allumage les servos partaient de 30° et revenaient seulement après avoir été appellé par le code, ce qui fait que les tringleries abimeraient tout
mais je vais essayer de travailler sur ton code de ce matin et essayer de comprendre les 0 des positions
je vais revoir ça tranquillement, parceque là je me mélange les pinceaux
mais je vais essayer de travailler sur ton code de ce matin et essayer de comprendre les 0 des positions
je vais revoir ça tranquillement, parceque là je me mélange les pinceaux
#89
VincentB
-
- Membres
- 50 messages
Membre
- Gender:Male
- Location:Beziers - France
- Interests:Modélisme, planeurs anciens, internet, photo, video...
Posté 27 décembre 2011 - 07:36
Donc c'est bon Yves, on (avec ma femme) a repris ton 1er code de ce matin, et on a resolu le probleme des servos qui partaient à l'allumage, grâce a ce que tu m'as expliqué, a savoir que ce que moi je considérais comme le neutre 0 du servo, c'est la position 90, partir de là on a pu rerégler toutes les positions des servos bras et tete, il me reste plus que la machoire qu'on fera demain, puis appliquer le tout au scénario d'animation. Dès que ce sera fini je mettrais une petite vidéo.
Par contre la télécommande marche pas terrible, enfin plutot bizzarement, il faut appuyer sur le reset de la carte, sinon elle ne marche pas, puis elle arrive a lancer 2 fois l'animation, et si je veux la relancer une 3eme fois, il me faut refaire un reset de la carte. je ne sais pas si ça vient du materiel?
Par contre la télécommande marche pas terrible, enfin plutot bizzarement, il faut appuyer sur le reset de la carte, sinon elle ne marche pas, puis elle arrive a lancer 2 fois l'animation, et si je veux la relancer une 3eme fois, il me faut refaire un reset de la carte. je ne sais pas si ça vient du materiel?
#90
Sani300
-

- Membres
-
- 150 messages
Membre occasionnel
- Gender:Male
-
Interests:Robotique
Concours
Drone
Posté 27 décembre 2011 - 09:48
Pour que ta telecommande fonctionne bien il faut que tu la mette en interruption. Parce que quand tu es dans une boucle for tu ne peux pas en sortir tant que tu es dedans. Donc si tu essaye d'appuier sur un bouton pendant que tu es dans la boucle for, c'est normal que sa ne fasse rien.
#93
VincentB
-
- Membres
- 50 messages
Membre
- Gender:Male
- Location:Beziers - France
- Interests:Modélisme, planeurs anciens, internet, photo, video...
Posté 28 décembre 2011 - 12:37
Bonjour tout le monde,
La télécommande, j'avais demandé à Yves, juste un démarrage de l'animation via bouton play, mais pas spécialement d'arrêt, puisqu'elle ne dure que 1 minute et s'arrête seule à la fin. Là j'ai terminé le code de synchronisation avec ma bande son, je ferais une petite video cet aprem. Apparement ma télécommande marche maintenant comme il faut, du moment que j'alimente ma carte/shiel par uniquement le bornier bleu + jumper, donc je ne touche plus à rien.
Je vous mets le code, au cas où il y aurait de grossières erreurs, mais bon pour ce dont j'ai besoin il marche, donc même s'il n'est pas parfait je pense que je ne vais plus trop y toucher
Pour l'instant j'ai prévu de lancer la bande son via un petit lecteur mp3 + ampli/HP de façon manuel, j'ai sur cette bande son un bip de départ, dès que je l'entend j'appui sur la télécommande et mon anim se lance. J'ai testé pas mal de fois et ça ne pose pas de soucis de synchronisation, bon ok c'est du bricolage, mais je ne suis pas non plus au 1/10e de s près, toute façon le mouvement vertical de machoire que j'ai fait ne peut pas reproduire une véritable machoire humaine avec mouvements complexes.
Par contre j'ai aussi acheté un module mp3, est-ce qu'il serait facile de l'intégrer sur l'arduino pour remplacer mon bricolage de lecteur mp3 externe? si oui comment? est-ce qu'il faut des composants en plus de cette carte? c'est ce module là http://www.emartee.com/product/41540/MP3%20Sound%20Module%20Mini%20SD%20Card
La télécommande, j'avais demandé à Yves, juste un démarrage de l'animation via bouton play, mais pas spécialement d'arrêt, puisqu'elle ne dure que 1 minute et s'arrête seule à la fin. Là j'ai terminé le code de synchronisation avec ma bande son, je ferais une petite video cet aprem. Apparement ma télécommande marche maintenant comme il faut, du moment que j'alimente ma carte/shiel par uniquement le bornier bleu + jumper, donc je ne touche plus à rien.
Je vous mets le code, au cas où il y aurait de grossières erreurs, mais bon pour ce dont j'ai besoin il marche, donc même s'il n'est pas parfait je pense que je ne vais plus trop y toucher
#include <IRremote.h>
#include <Servo.h>
int RECV_PIN = 11;
IRrecv irrecv(RECV_PIN);
decode_results results;
Servo bras;
Servo tete;
Servo machoire;
int bra = 0;
int tet = 0;
int mache = 0;
void setup()
{
bras.attach(3);
tete.attach(5);
machoire.attach(6);
Serial.begin(9600);
irrecv.enableIRIn();
}
void loop() {
if (irrecv.decode(&results)) {
if(results.value == 0xFFC23D)
{
for(bra = 90; bra>=50; bra-=1)
{
bras.write(bra);
delay(30);
}
delay(4000);
for(bra = 50; bra < 90; bra += 1)
{
bras.write(bra);
delay(20);
}
delay(100);
for(tet = 90; tet < 130; tet += 1)
{
tete.write(tet);
delay(15);
}
for(tet = 130; tet>=50; tet-=1)
{
tete.write(tet);
delay(15);
}
delay(100);
for(tet = 50; tet < 110; tet += 1)
{
tete.write(tet);
delay(20);
}
delay(300);
int compteur = 0;
while (compteur < 6)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
delay(500);
int compteur = 0;
while (compteur < 5)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
delay(500);
int compteur = 0;
while (compteur < 15)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
for(tet = 110; tet>=75; tet-=1)
{
tete.write(tet);
delay(15);
}
for(tet = 75; tet < 100; tet += 1)
{
tete.write(tet);
delay(15);
}
int compteur = 0;
while (compteur < 18)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
delay(500);
int compteur = 0;
while (compteur < 8)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
delay(1200);
int compteur = 0;
while (compteur < 12)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
delay(1000);
int compteur = 0;
while (compteur < 10)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
}
}
}
}
}
}
delay(2000);
for(bra = 90; bra>=50; bra-=1)
{
bras.write(bra);
delay(30);
}
delay(4000);
for(bra = 50; bra < 90; bra += 1)
{
bras.write(bra);
delay(20);
}
delay(1000);
for(tet = 110; tet>=60; tet-=1)
{
tete.write(tet);
delay(15);
}
for(tet = 60; tet < 90; tet += 1)
{
tete.write(tet);
delay(15);
}
irrecv.resume();
}
}
}
Pour l'instant j'ai prévu de lancer la bande son via un petit lecteur mp3 + ampli/HP de façon manuel, j'ai sur cette bande son un bip de départ, dès que je l'entend j'appui sur la télécommande et mon anim se lance. J'ai testé pas mal de fois et ça ne pose pas de soucis de synchronisation, bon ok c'est du bricolage, mais je ne suis pas non plus au 1/10e de s près, toute façon le mouvement vertical de machoire que j'ai fait ne peut pas reproduire une véritable machoire humaine avec mouvements complexes.
Par contre j'ai aussi acheté un module mp3, est-ce qu'il serait facile de l'intégrer sur l'arduino pour remplacer mon bricolage de lecteur mp3 externe? si oui comment? est-ce qu'il faut des composants en plus de cette carte? c'est ce module là http://www.emartee.com/product/41540/MP3%20Sound%20Module%20Mini%20SD%20Card
#94
Astondb8
-
- Membres
-
- 1â¯111 messages
Membre chevronné
- Gender:Male
- Location:Paris
Posté 28 décembre 2011 - 01:04
Un bon code est un code qui marche.
Donc oui il est optimisa le.
Avec par exemple une boucle de 10 pas pou la mâchoire.
Mzis nous verons cela plus tard.
Pour le moment il y a ton son à regler
Donc oui il est optimisa le.
Avec par exemple une boucle de 10 pas pou la mâchoire.
Mzis nous verons cela plus tard.
Pour le moment il y a ton son à regler
#95
VincentB
-
- Membres
- 50 messages
Membre
- Gender:Male
- Location:Beziers - France
- Interests:Modélisme, planeurs anciens, internet, photo, video...
Posté 28 décembre 2011 - 05:27
J'ai parlé trop vite à propos de la télécommande, elle avait pourtant bien marché plusieurs fois de suite, c'est a dire relancer l'animation quand celle ci était terminé, mais voilà que ça recommence, j'arrive à relancer l'animation que 2 fois de suite, voir qu'une fois, et pour que ça remarche il me faut faire un reset de la carte. Je ne sais pas si c'est le matériel qui est en cause, ou le code à modifier un peu
Mais je préfèrerais finalement essayer de déclancher l'animation avec un simple petit bouton poussoir.
Comment branches t'on un bouton poussoir à 2 contacts? sur quelles pins du shield? et quel code doit on mettre pour remplacer celui de la télécommande. Avec ce bouton poussoir je voudrais donc pouvoir juste lancer l'animation dont le dernier code est ci-dessus. Il me sera facile de camoufler ce bouton poussoir sur le planeur, et ça m'éviterait la télécommande, qui semble un peu camelote
Pour la bouche, la synchro serait bien sûr perfectible en ajoutant quelques micro pause de plus, mais vu la taille de la bouche on ne voit vraiment pas grand chose. En fait sur la video on voit plus les défauts qu'en vrai
Voici la petite video du pilote avec le son
http://www.retroplane.net/mira3/animation_pilote.wmv
Mais je préfèrerais finalement essayer de déclancher l'animation avec un simple petit bouton poussoir.
Comment branches t'on un bouton poussoir à 2 contacts? sur quelles pins du shield? et quel code doit on mettre pour remplacer celui de la télécommande. Avec ce bouton poussoir je voudrais donc pouvoir juste lancer l'animation dont le dernier code est ci-dessus. Il me sera facile de camoufler ce bouton poussoir sur le planeur, et ça m'éviterait la télécommande, qui semble un peu camelote
Pour la bouche, la synchro serait bien sûr perfectible en ajoutant quelques micro pause de plus, mais vu la taille de la bouche on ne voit vraiment pas grand chose. En fait sur la video on voit plus les défauts qu'en vrai
Voici la petite video du pilote avec le son
http://www.retroplane.net/mira3/animation_pilote.wmv
#96
VincentB
-
- Membres
- 50 messages
Membre
- Gender:Male
- Location:Beziers - France
- Interests:Modélisme, planeurs anciens, internet, photo, video...
Posté 29 décembre 2011 - 10:14
Bonjour tout le monde,
Sur des sites, j'ai cru comprendre que un bouton poussoir se montait comme ça?
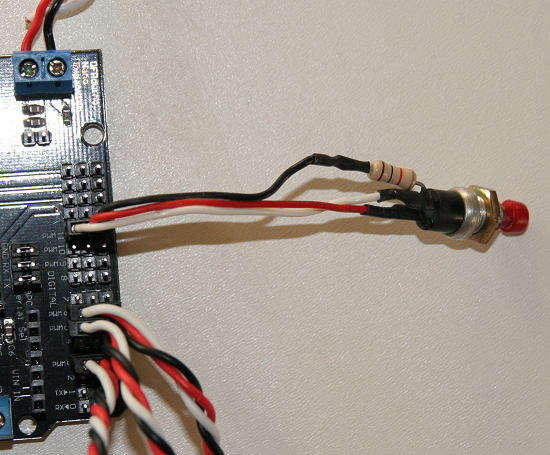
(jai soudé une resistance de 10k)
mais vous pouvez me confirmer que c'est bon? j'ai toujours peur de crâmer la carte en faisant des choses au pif
et pour remplacer le recepteur IR de la télécommande, je branche aussi mon bouton poussoir sur la pin 11?
si vous pouviez m'aider a remplacer le code de la telecommande (qui est 3 messages plus haut) pour actionner l'animation par ce bouton poussoir plutot que par la telecommande, merci
Sur des sites, j'ai cru comprendre que un bouton poussoir se montait comme ça?
(jai soudé une resistance de 10k)
mais vous pouvez me confirmer que c'est bon? j'ai toujours peur de crâmer la carte en faisant des choses au pif
et pour remplacer le recepteur IR de la télécommande, je branche aussi mon bouton poussoir sur la pin 11?
si vous pouviez m'aider a remplacer le code de la telecommande (qui est 3 messages plus haut) pour actionner l'animation par ce bouton poussoir plutot que par la telecommande, merci
#97
Astondb8
-
- Membres
-
- 1â¯111 messages
Membre chevronné
- Gender:Male
- Location:Paris
Posté 29 décembre 2011 - 06:43
Voila le câblage dune PullUp pour un poussoir (ou tout autre élément ayant besoin d'une PullUp
La valeur n'a pas trop d’importance
Pas trop faible (elle ne servirait à rien
Pas trop grosse elle consommerait pour rien
http://dl.dropbox.com/u/4673542/Forum/PullUp.JPG
La valeur n'a pas trop d’importance
Pas trop faible (elle ne servirait à rien
Pas trop grosse elle consommerait pour rien
http://dl.dropbox.com/u/4673542/Forum/PullUp.JPG
#98
VincentB
-
- Membres
- 50 messages
Membre
- Gender:Male
- Location:Beziers - France
- Interests:Modélisme, planeurs anciens, internet, photo, video...
Posté 31 décembre 2011 - 04:34
Bonjour tout le monde
Finalement j'ai préféré mettre tout le matériel d'animation dans une caisse, qui sera branchée discrètement sous le planeur, plutot que de l'embarquer dans le planeur, qui en vol ne servirait à rien, gain de poids et place qui m'arrange bien
Pour ce qui est de la télécommande, j'ai réussi a modifier le code et donc remplacé par un bouton poussoir, la synchro est bonne, quand j'entend le bip de départ de la bande son, j'appuie sur le bouton et l'animation démarre
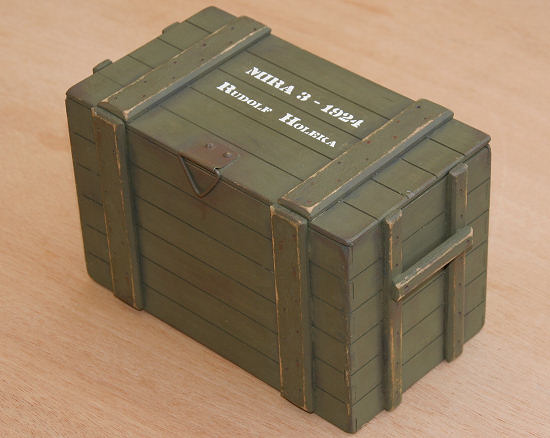
Voici la caisse que j'ai faite en ctp 15x10x9cm peinte à la Humbrol et veillit, les lettrages sont peints avec un pochoir découpé à la CraftRobo.
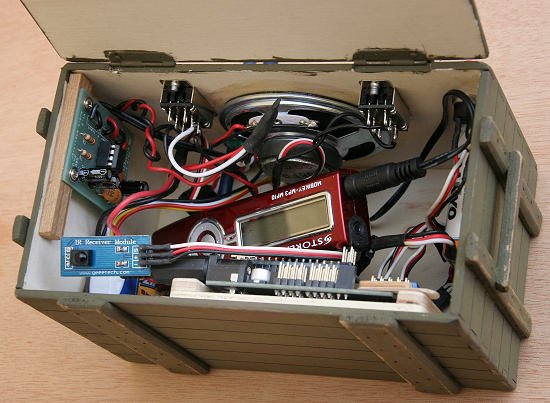
Vue arrière avec le HP et les inter, qui ne se verront pas, puisque la caisse sera contre le fuselage

merci à tous pour votre aide, je continue a suivre le forum, c'est passionnant ce que vous faites, et pour le prochain planeur j'essayerais d'intégrer le lecteur mp3 à la carte avec votre aide, ou peut être pour celui là, mais je me pencherais sur le sujet quand j'aurais terminé la construction du planeur, j'ai encore 4 ou 5 mois de boulot
voici le code final de l'animation, déclenché par le bouton poussoir
Finalement j'ai préféré mettre tout le matériel d'animation dans une caisse, qui sera branchée discrètement sous le planeur, plutot que de l'embarquer dans le planeur, qui en vol ne servirait à rien, gain de poids et place qui m'arrange bien
Pour ce qui est de la télécommande, j'ai réussi a modifier le code et donc remplacé par un bouton poussoir, la synchro est bonne, quand j'entend le bip de départ de la bande son, j'appuie sur le bouton et l'animation démarre
Voici la caisse que j'ai faite en ctp 15x10x9cm peinte à la Humbrol et veillit, les lettrages sont peints avec un pochoir découpé à la CraftRobo.
Vue arrière avec le HP et les inter, qui ne se verront pas, puisque la caisse sera contre le fuselage
merci à tous pour votre aide, je continue a suivre le forum, c'est passionnant ce que vous faites, et pour le prochain planeur j'essayerais d'intégrer le lecteur mp3 à la carte avec votre aide, ou peut être pour celui là, mais je me pencherais sur le sujet quand j'aurais terminé la construction du planeur, j'ai encore 4 ou 5 mois de boulot
voici le code final de l'animation, déclenché par le bouton poussoir
#include <Servo.h>
Servo bras;
Servo tete;
Servo machoire;
int bra = 0;
int tet = 0;
int mache = 0;
int bouton = 2;
void setup()
{
bras.attach(3);
tete.attach(5);
machoire.attach(6);
Serial.begin(9600);
pinMode(bouton, INPUT);
}
void loop() {
if (digitalRead(bouton) == HIGH)
{
for(bra = 90; bra>=50; bra-=1)
{
bras.write(bra);
delay(30);
}
delay(4000);
for(bra = 50; bra < 90; bra += 1)
{
bras.write(bra);
delay(20);
}
delay(100);
for(tet = 90; tet < 130; tet += 1)
{
tete.write(tet);
delay(15);
}
for(tet = 130; tet>=50; tet-=1)
{
tete.write(tet);
delay(15);
}
delay(100);
for(tet = 50; tet < 110; tet += 1)
{
tete.write(tet);
delay(20);
}
delay(300);
int compteur = 0;
while (compteur < 6)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
delay(500);
int compteur = 0;
while (compteur < 5)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
delay(500);
int compteur = 0;
while (compteur < 15)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
for(tet = 110; tet>=75; tet-=1)
{
tete.write(tet);
delay(15);
}
for(tet = 75; tet < 100; tet += 1)
{
tete.write(tet);
delay(15);
}
int compteur = 0;
while (compteur < 18)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
delay(500);
int compteur = 0;
while (compteur < 8)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
delay(1200);
int compteur = 0;
while (compteur < 12)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
{
delay(1000);
int compteur = 0;
while (compteur < 10)
{
for(mache = 90; mache < 140; mache += 1)
{
machoire.write(mache);
delay(3);
}
for(mache = 140; mache>=90; mache-=1)
{
machoire.write(mache);
delay(3);
}
compteur++;
}
}
}
}
}
}
}
delay(2000);
for(bra = 90; bra>=50; bra-=1)
{
bras.write(bra);
delay(30);
}
delay(4000);
for(bra = 50; bra < 90; bra += 1)
{
bras.write(bra);
delay(20);
}
delay(1000);
for(tet = 100; tet>=60; tet-=1)
{
tete.write(tet);
delay(20);
}
for(tet = 60; tet < 90; tet += 1)
{
tete.write(tet);
delay(20);
}
}
}
#99
seb03000
-

- Membres
-
- 1â¯193 messages
Membre chevronné
- Gender:Male
Posté 31 décembre 2011 - 05:21
Haaaaaaaaaa enfin VincentB tu a réussi je suis content tout de même car c'est t'un projet bien finalisé très propre,
et belle initiative pour la boite j'aime bien.
Je voie que mes conseille pour le bouton poussoir a donné c'est fruit.
J'ai hâte de voir une démonstration en vidéo de ton projet qui et enfin fini VincentB , sa doit bien donné.
En revanche je te souhaite de passé une très bonne fête de fin d'année.
et belle initiative pour la boite j'aime bien.
Je voie que mes conseille pour le bouton poussoir a donné c'est fruit.
J'ai hâte de voir une démonstration en vidéo de ton projet qui et enfin fini VincentB , sa doit bien donné.
En revanche je te souhaite de passé une très bonne fête de fin d'année.
#100
J-F
-

- Membres
- 1 messages
Nouveau membre
Posté 31 décembre 2011 - 05:51
Super Vincent ,
le monde est petit ,Pour info je joue aussi avec les circuits Arduino .
je viens de lire l'entiereté du sujet .
Whouaaa voila que tu t'es mis a la programmation , super quand je vois le résultat .
A+
Jean-Francois Delhove
le monde est petit ,Pour info je joue aussi avec les circuits Arduino .
je viens de lire l'entiereté du sujet .
Whouaaa voila que tu t'es mis a la programmation , super quand je vois le résultat .
A+
Jean-Francois Delhove
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users


{kind=link}