

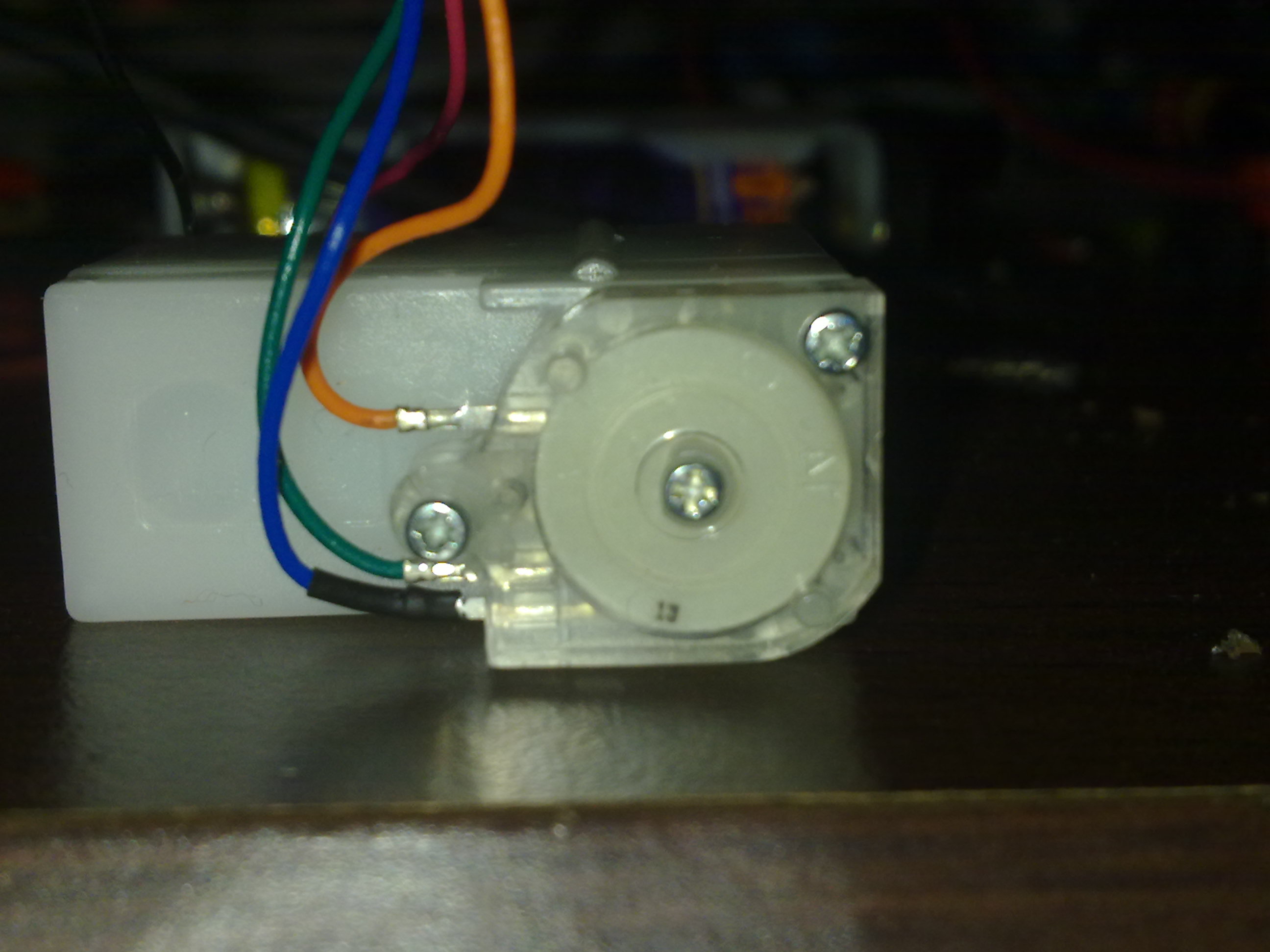
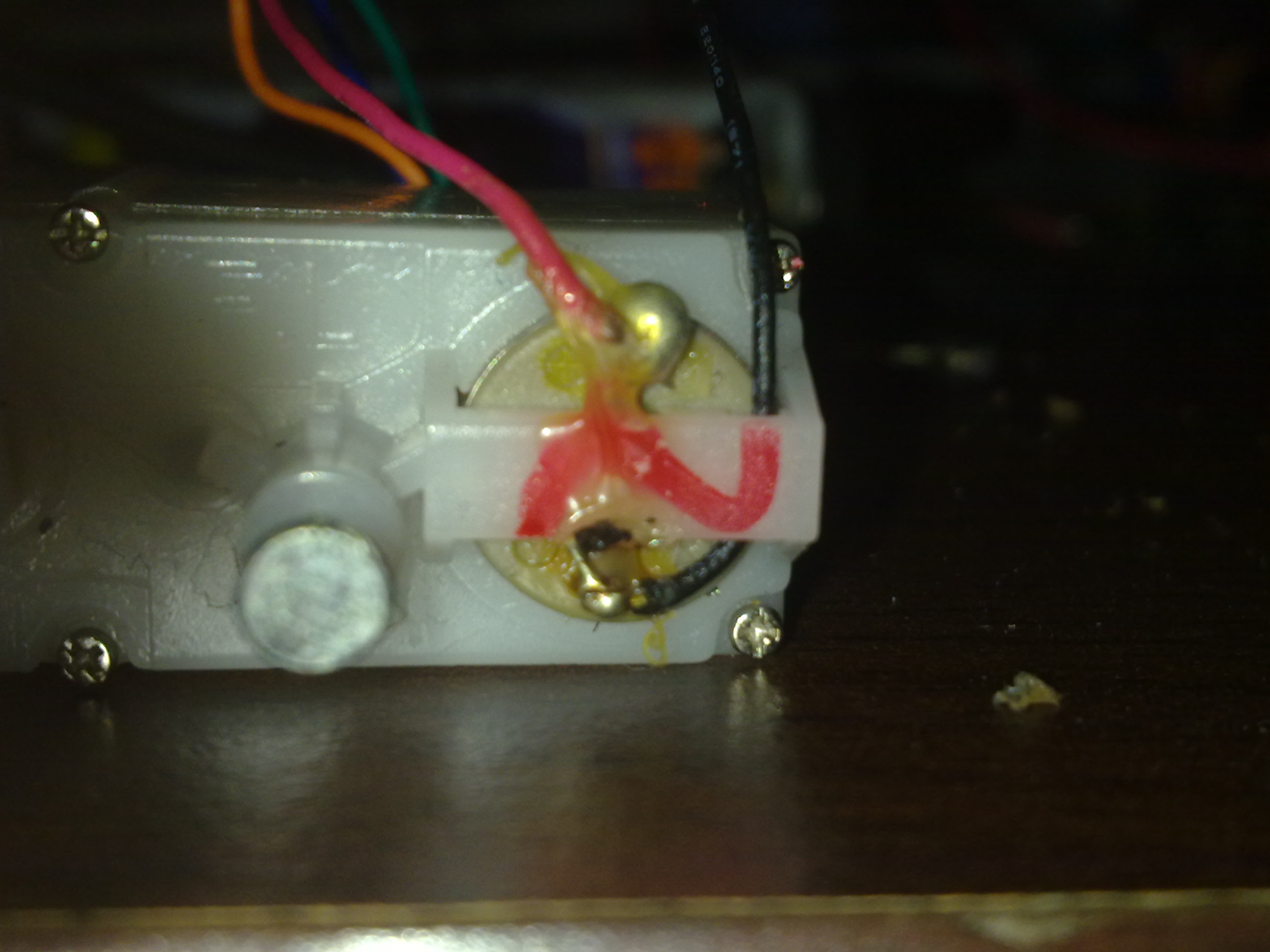
voila pour un projets personelle je voudrais utiliser des servo moteur récupérer d'un ancien robot seulement je n'ai pas que 3 fils mais 5
voila des photo des servo:

@+ Maxime

Membre chevronné

Posté 16 mars 2012 - 06:36
A.R.M.I
Autonomous Robotics Mechanics Intelligent
Membre

Posté 16 mars 2012 - 11:06

Pilier du forum

Posté 16 mars 2012 - 11:15
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
Membre passionné

Posté 17 mars 2012 - 05:04
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)









0 members, 0 guests, 0 anonymous users






