
Fichier(s) joint(s)
-
 fonction telecomande.bmp 924,12 Ko
160 téléchargement(s)
fonction telecomande.bmp 924,12 Ko
160 téléchargement(s)

Habitué

Posté 24 mai 2012 - 08:46
fonction telecomande.bmp 924,12 Ko
160 téléchargement(s)
Staff Robot Maker

Posté 26 mai 2012 - 09:20
 maintenant on peut faire quelque chose de constructif Dis le moi c'est nécessaire pour la suite ( des petits blocs )
maintenant on peut faire quelque chose de constructif Dis le moi c'est nécessaire pour la suite ( des petits blocs )Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné

Posté 26 mai 2012 - 10:17
Staff Robot Maker
Posté 26 mai 2012 - 10:53
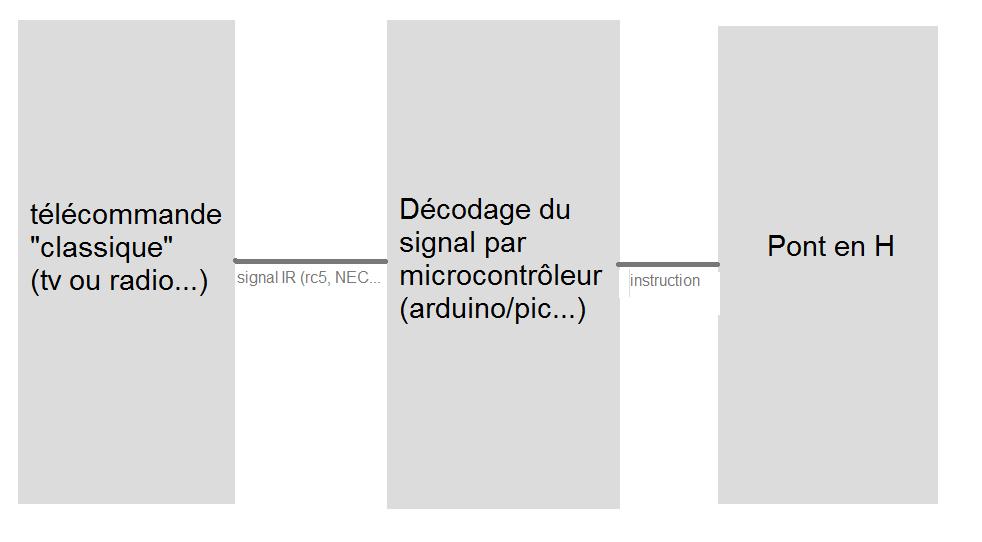
Par contre je ne pense pas que tu puisses décoder le signal d'une télécommande en analogique: il te faudra un microcontrôleur...il y a une lobrairie arduino pour les télécommandes, tu peux aussi t'indpirer du code de seb0300

Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné
Posté 26 mai 2012 - 11:01
Staff Robot Maker
Posté 26 mai 2012 - 12:07
Les TSOP démodulent une certaine fréquence, c'est à dire qy'ils passe à 0 lorsqu'ils la recoivent; mais ensuite il faut un mictocontroleur pour lire le mot binaire transmit par le télécommande et le faire correspondre à un touche.
Exemple:
la télécommande envoit un signal à 38khz pendant 10ms puis une pause de 20ms et enfin un deuxième signal de 30ms (j'ai pris totalement au hasard mais il y a des protocoles speciaux pour les télécommandes: NEC etc.)
le récepteur démodule le signale ce qui nous donne: 100111 si on prend 10ms de longueur de bit (sans jeux de mots...). Disons que cela correspond à la touche "on". Pour que le robot sache que c'est la touche on et qu'il faut s'allumer, il faut qu'il comprenne le mot, et donc il faut un microcontroleur (peut-être que c'est possible en analogique mais je ne pense pas...)
en appuyant sur l'un ou l'autre des boutons tu envois une certaines fréquence et ton recepteur change d'état ce qui permet d'envoyer un ordre d'avance à l'un ou l'autre des moteurs mais utiliser un microcontrolleur n'est pas toujours nécessaire =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné
Posté 26 mai 2012 - 12:26
il suffit de prendre deux TSOP de fréquence différentes et de faire des mots d'un seul bit 1 ou 0
Après je reconnais qu'il y a d'autre façon de faire
Staff Robot Maker
Posté 26 mai 2012 - 11:12
à ce moment là il doit faire sa télécommande lui-même, parce que les télécommandes classiques utilisent un protocole assez complexe. En plus mis-à-part les télécommandes universelles je ne crois pas qu'il existe des télécommandes qui émettent à plusieurs fréquences porteuses différentes...
Si il fabrique sa télécommande lui-même ça complique encore la chose (quoique ça peut être assez facile avec un ne556 et deux boutons poussoirs)...
Je pense franchement que vouloir faire ça en analogique est de la torture cérébrale inutile quand on peut faire ça en 30 lignes de code avec une arduino ou autre... Après le choix appartient à Newbies
un truc interessant même serait de faire le même robot avec un pic =) et d'étudier la différence de prix et la différence de complexité
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné
Posté 27 mai 2012 - 12:33
Habitué
Posté 27 mai 2012 - 02:56
Habitué
Posté 27 mai 2012 - 03:10
Habitué
Posté 30 mai 2012 - 12:27
Staff Robot Maker
Posté 30 mai 2012 - 02:44
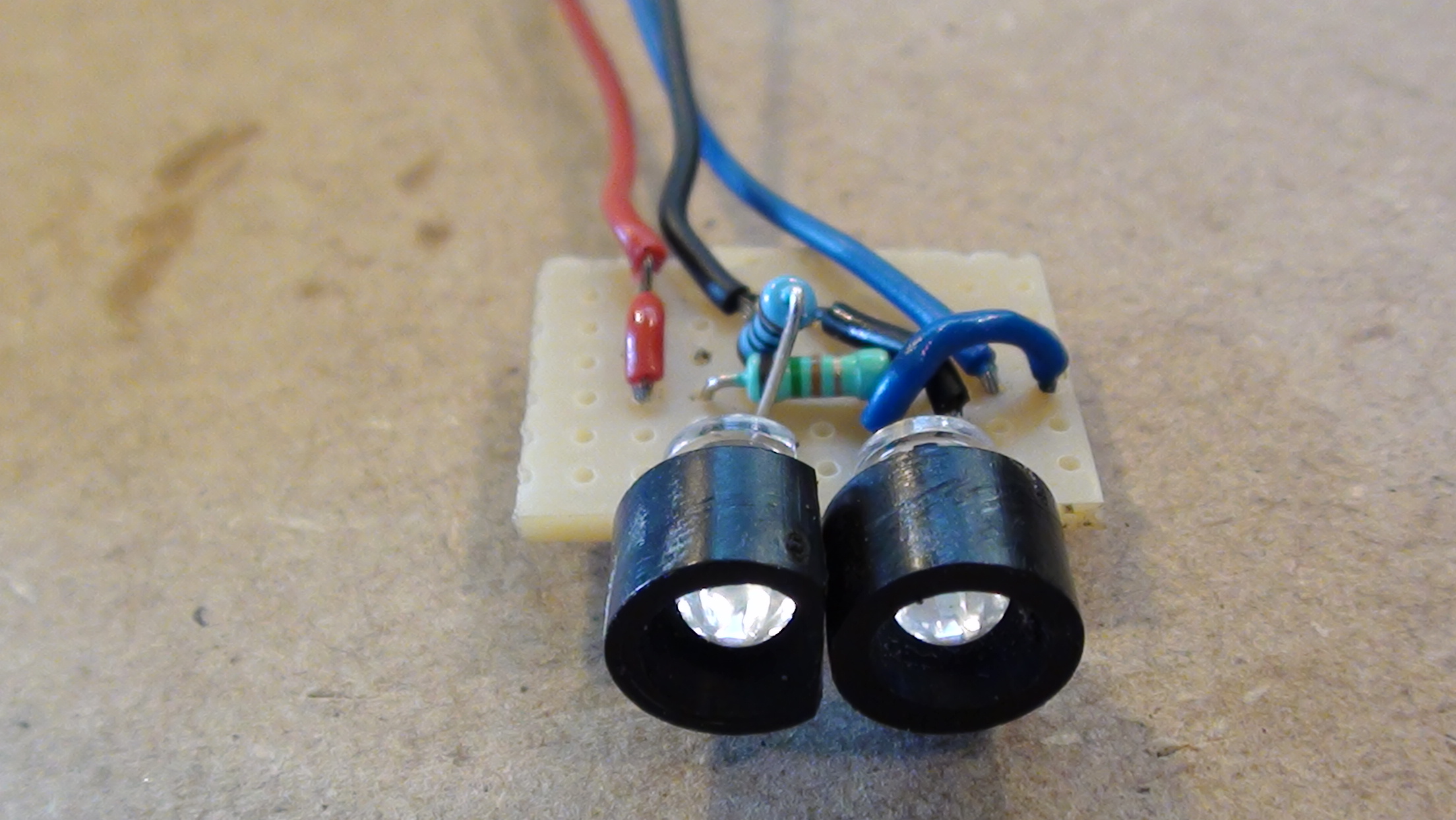
bon j'ai fait un test pour mon robot en donnant 3V au capteur qui s'allume mais apparament le phototransistor ne recoit rien car il vas tout droit et cela meme si il y a un mur devant donc je ne sait pas vraiment d'ou vien le probleme
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Habitué
Posté 01 juin 2012 - 06:46
 donc je vois sa et je regarde si sa fonctionne aprés
donc je vois sa et je regarde si sa fonctionne aprés
Staff Robot Maker
Posté 02 juin 2012 - 01:53
C'est des homemades ( voir photo post plus haut ) et il y avait bien de la lumiere infrarouge qui sortais de l'emmetrice apré la reception j'sais pas.
Sinon j'en ai parlé a mon prof et il ma dit de revoir les branchements des moteurs. Et effecivement comme un con j'avais branché le plus des 2 moteurs sur la meme sortie
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Habitué
Posté 02 juin 2012 - 08:11

Staff Robot Maker
Posté 02 juin 2012 - 06:42
J'adore l'expression x')
Toi, t'as la tête dans le C ^^
Bon j'ai refait les branchements des moteurs mais maintenant c'est encore mieux il n'avance plus du tout
Je n'ai pas de voltmetre fonctionelle pour testé les capteurs comment peut on faire sans ?
Merci d'avance
Theo
en attendant tu peux refaire les schémas en "lisant" les circuits et tu compare les schémas que tu as lus sur tes circuits au schémas qu'on été censé faire qu'on a vu ensemble . Si tu as des doutes sur certains trucs tu peux aussi prendre le circuit en photo et rajouter avec paint les pattes qui sont connectées entres elles ...
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné
Posté 21 juin 2012 - 06:55









0 members, 1 guests, 0 anonymous users





