... A ce que j'en ai compris tes servos semblent fonctionner par à coup lors de la descente c'est à dire lorsque le poids du robot " aide " le servo à descendre ? c'est bien ça
...
Sinon pour ne pas changer toutes les pièces que tu a faites le mieux serait de nous donner les caractéristiques de tes servos pour qu'on y regarde de plus près.
skyhack.
Les servo c'est des 15Kg/cm à 6.0 V et je les alimente à 11.3v j'ai pas mesuré plus loin.
Sinon t'as bien compris le problème, c'est quand la gravité aide le servo qu'il donne des à coups et qu'il essai de les compenser.
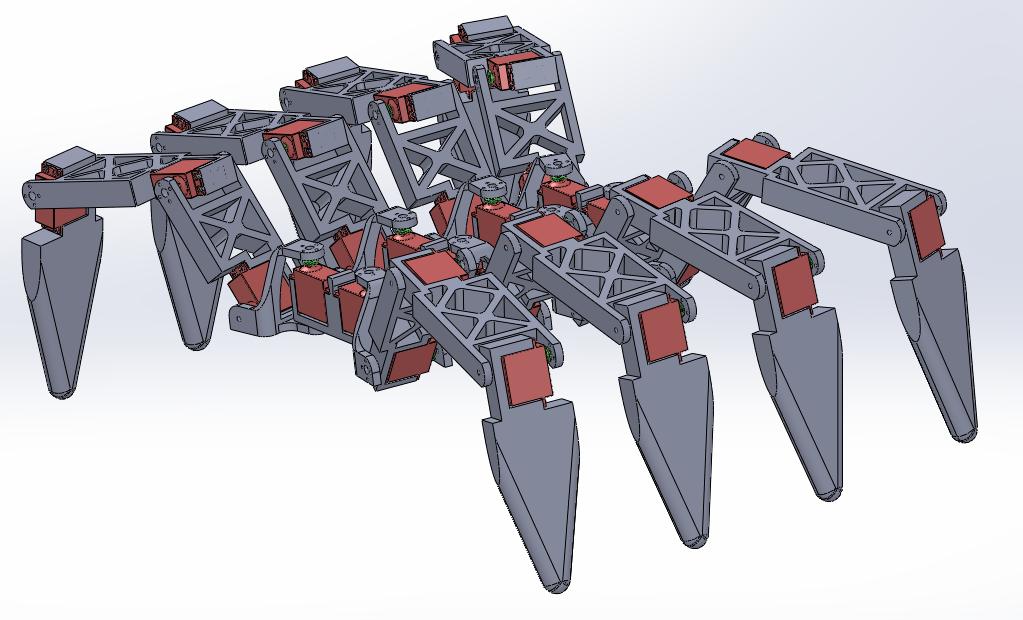
Bon la les éléments plastique sont en 6.5mm je les ai redessiné en 2.1mm se qui semple être de loin assez solide. et plus léger.
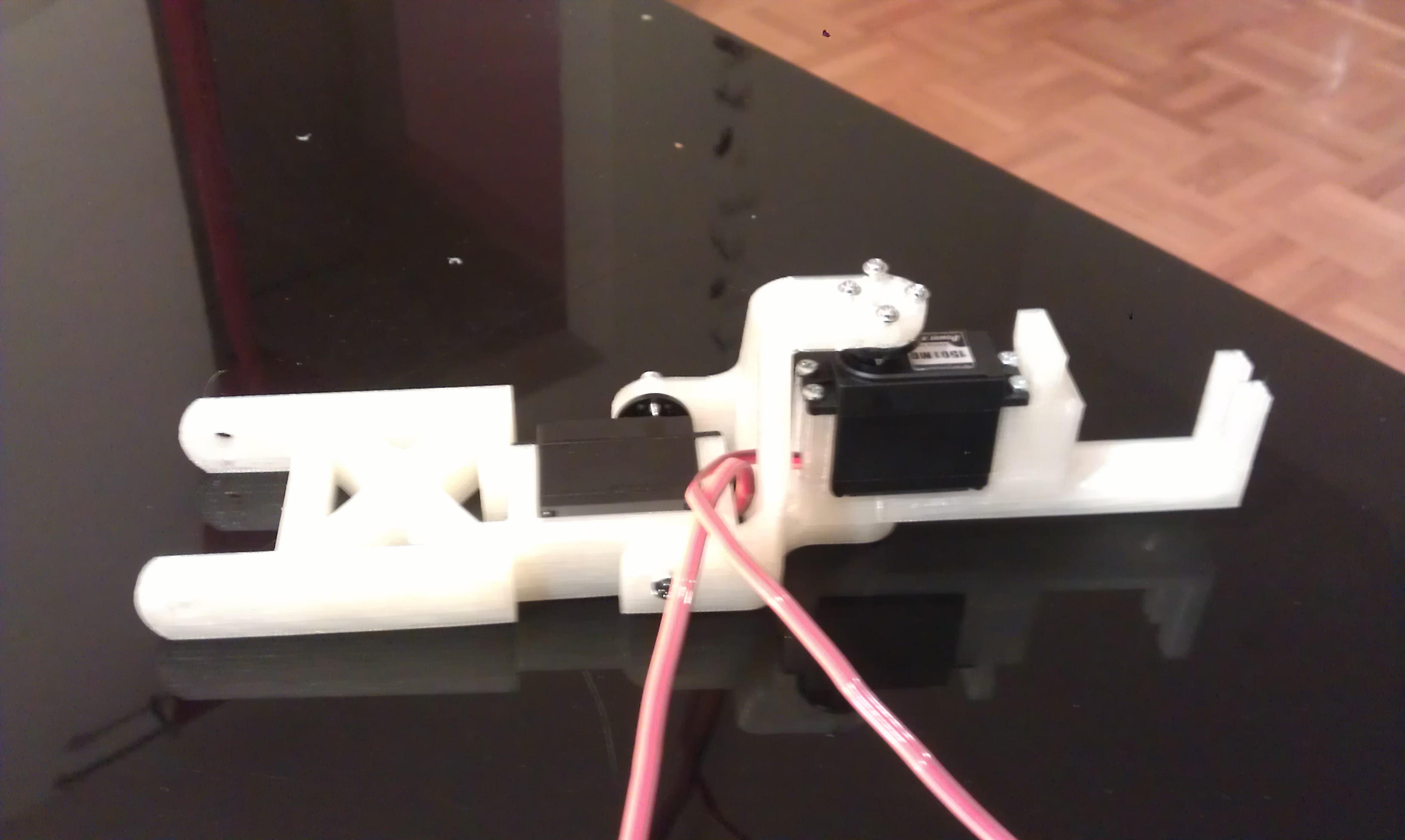
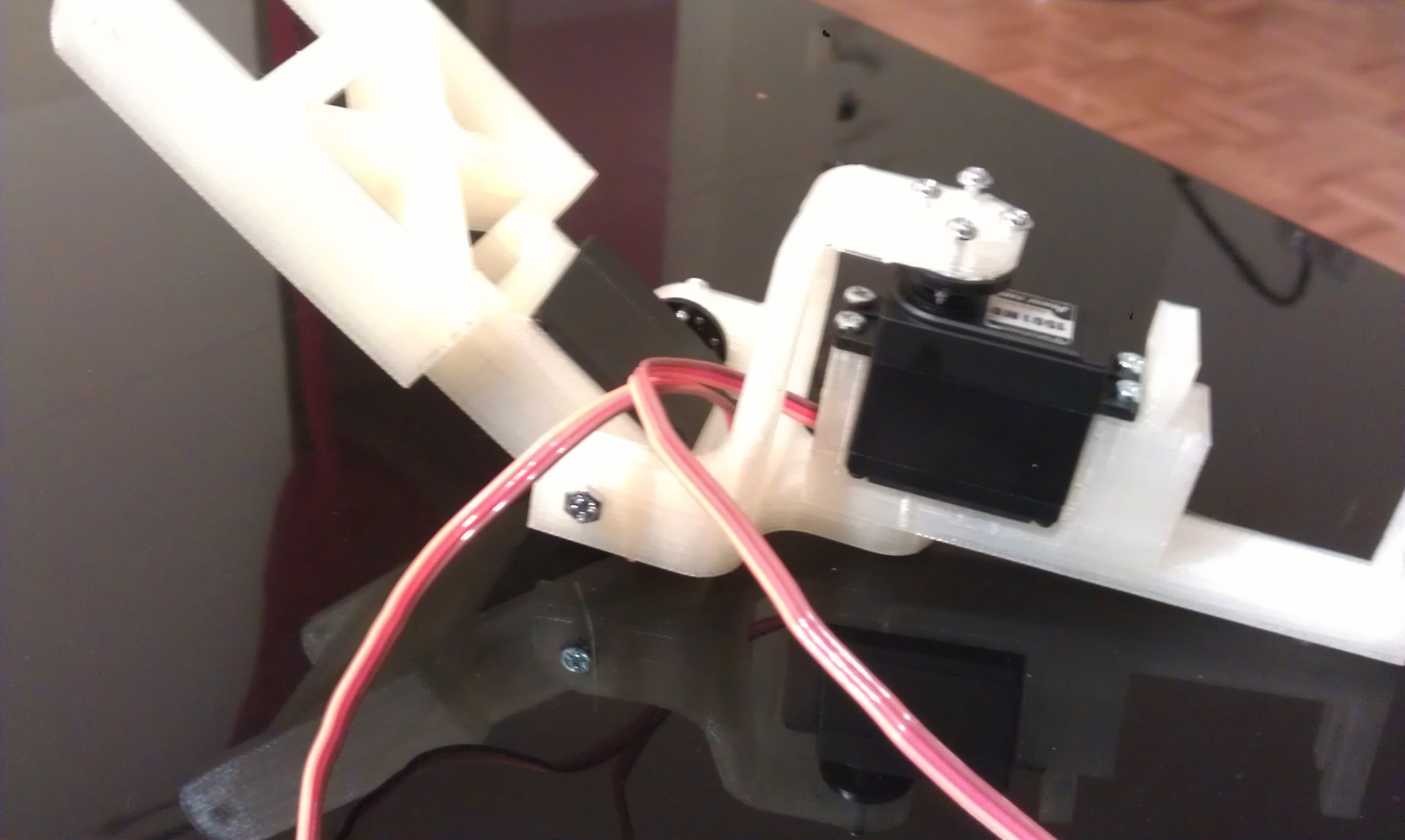
... Je vois que tes articulations en plastique sont montées sur des boulons, ça ne va pas durer longtemps de cette manière. Ton plastique va rapidement se bouffer sur les filetages et tes pattes vont prendre du jeu ... tu devrais revoir tes systèmes de pivots.
Les boulons sur les articulations, sont uniquement vissé sur la partie extérieure. La pièce intérieur à un diamètre plus grand que le pas de visse et se contente de tourné autour. C'est claire qu'au niveau frottement c'est pas ça mais pour le moment ça va. (je vais voir pour trouver un tube métallique pour réduire le frottement)
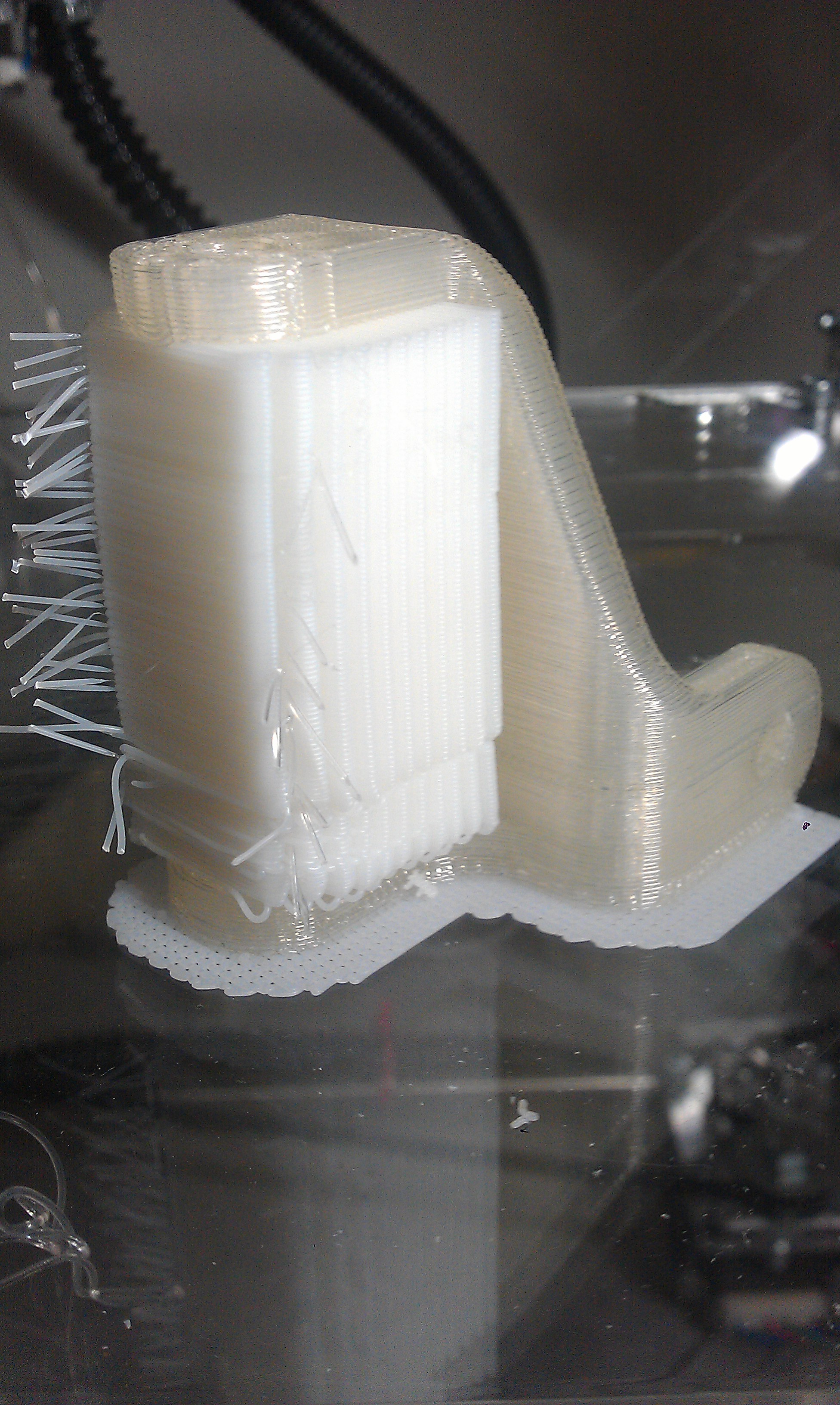
Comme il me faut a peine plus d'1h pour imprimer une pièce, j'ai le temps de voir venir.


 )
)