Aujourd'hui mon professeur de robotique nous a annoncer que nous allons participer a la competition "FIRST" de robotique.
Et nous avons recu l' objectif :
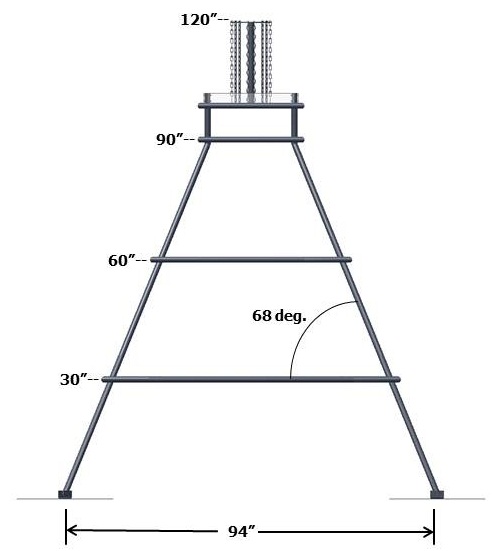
le robot devra etre capable de lancer des Frisbee et grimper sur une piramide de environ 2.30 metres.
Je n'ai pas les documents sous les yeux mais je pense les avoir cette semaine ou la semaine prochaine au plus tard.
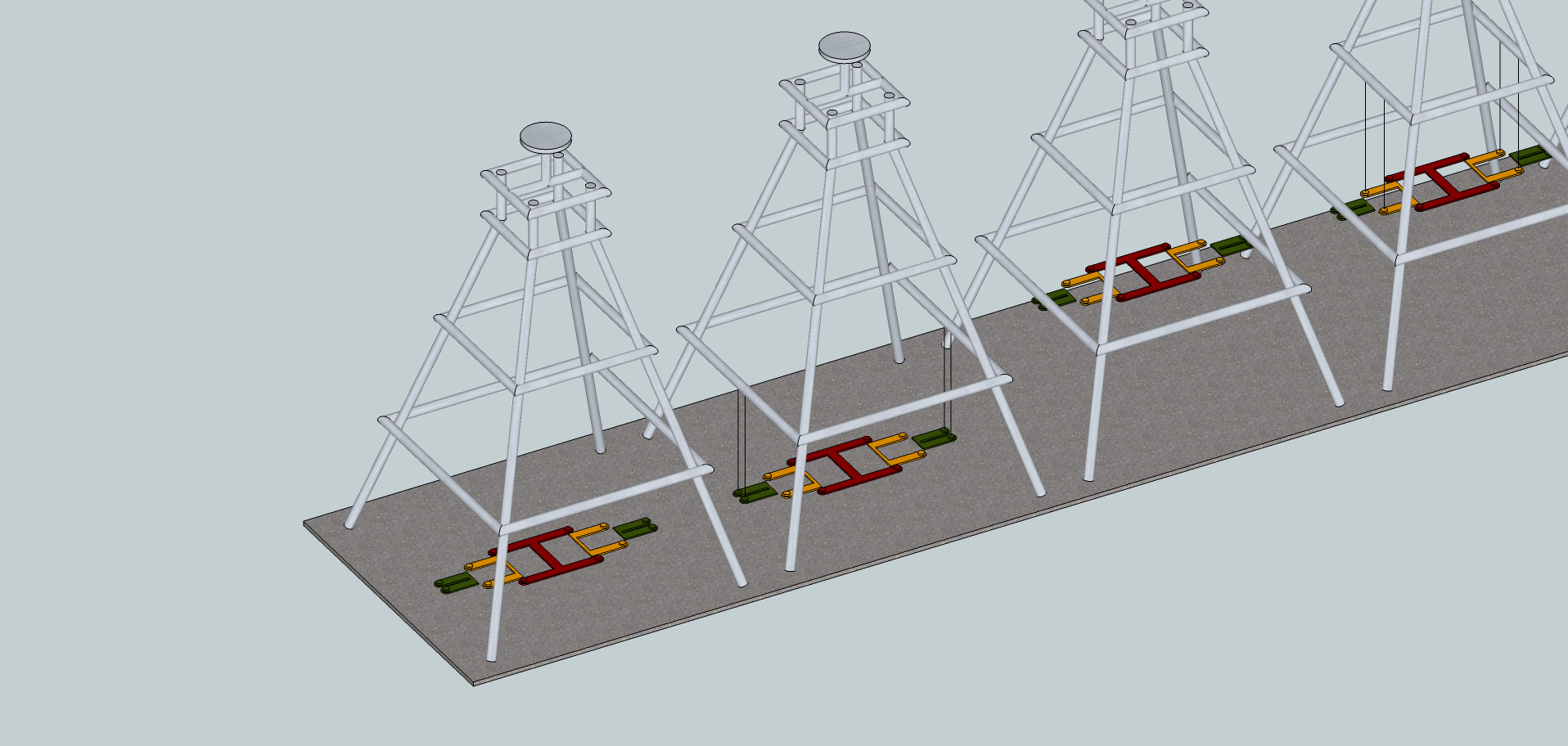
Mes camarades et moi sommes en train de reflechir a un systeme pour que le robot monte la pyramide.Nous verrons plus tard la partie Frisbee.
Je vais vous expliquer un peu :
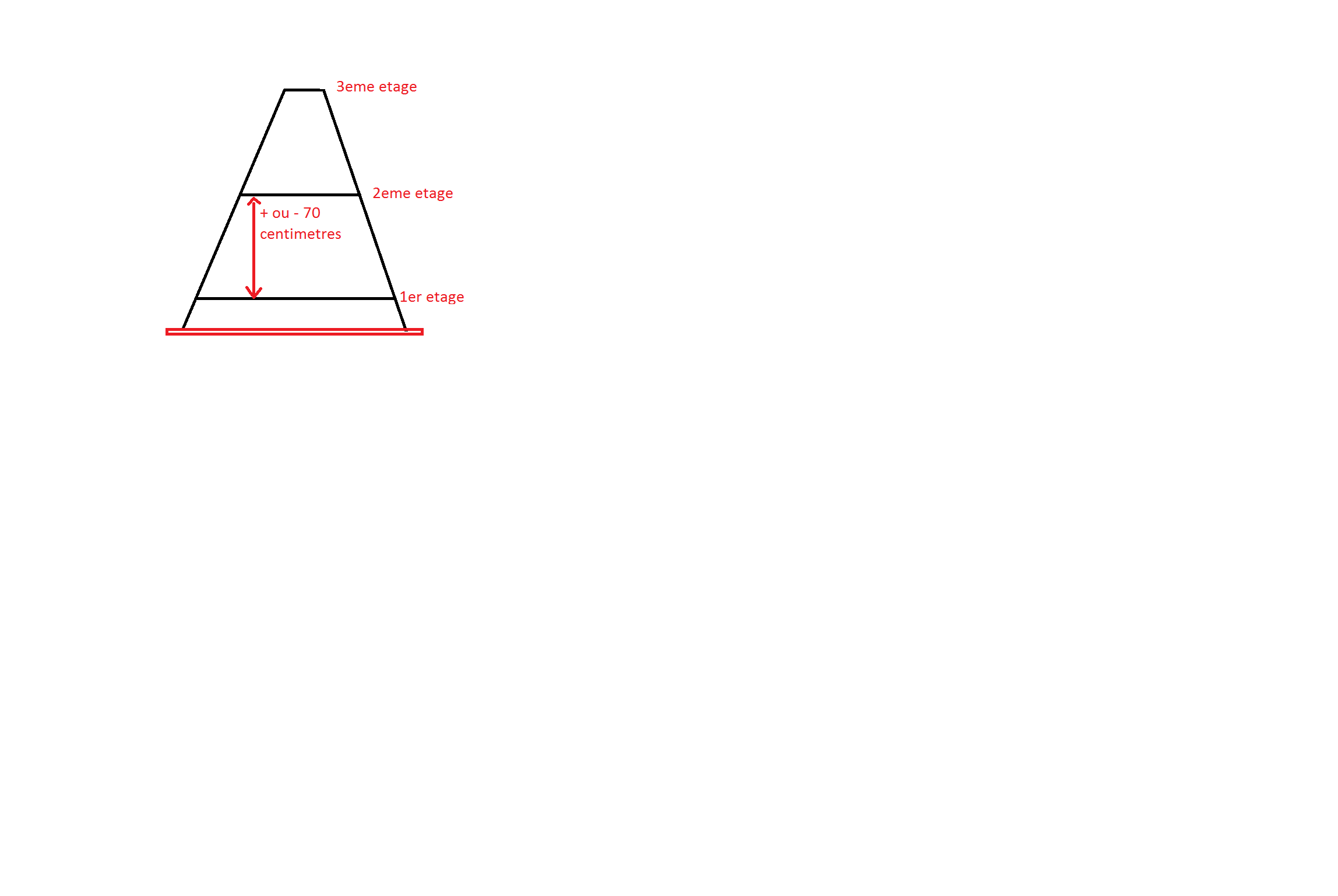
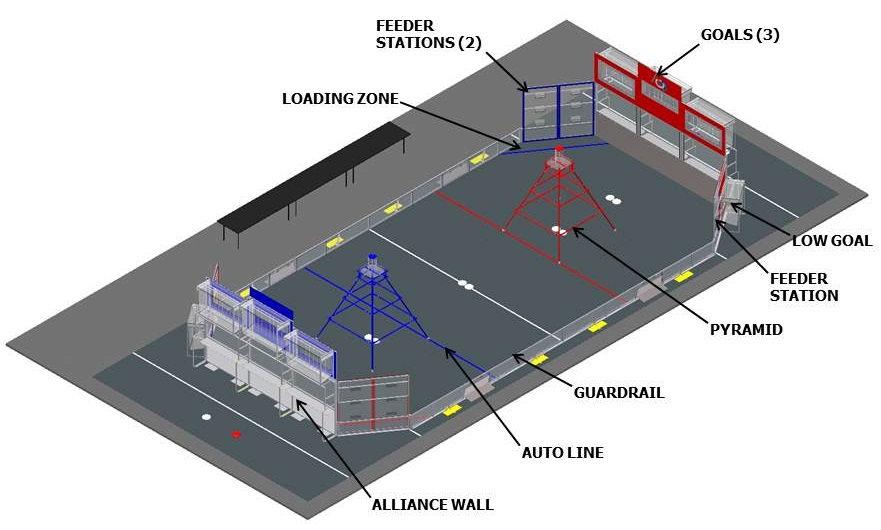
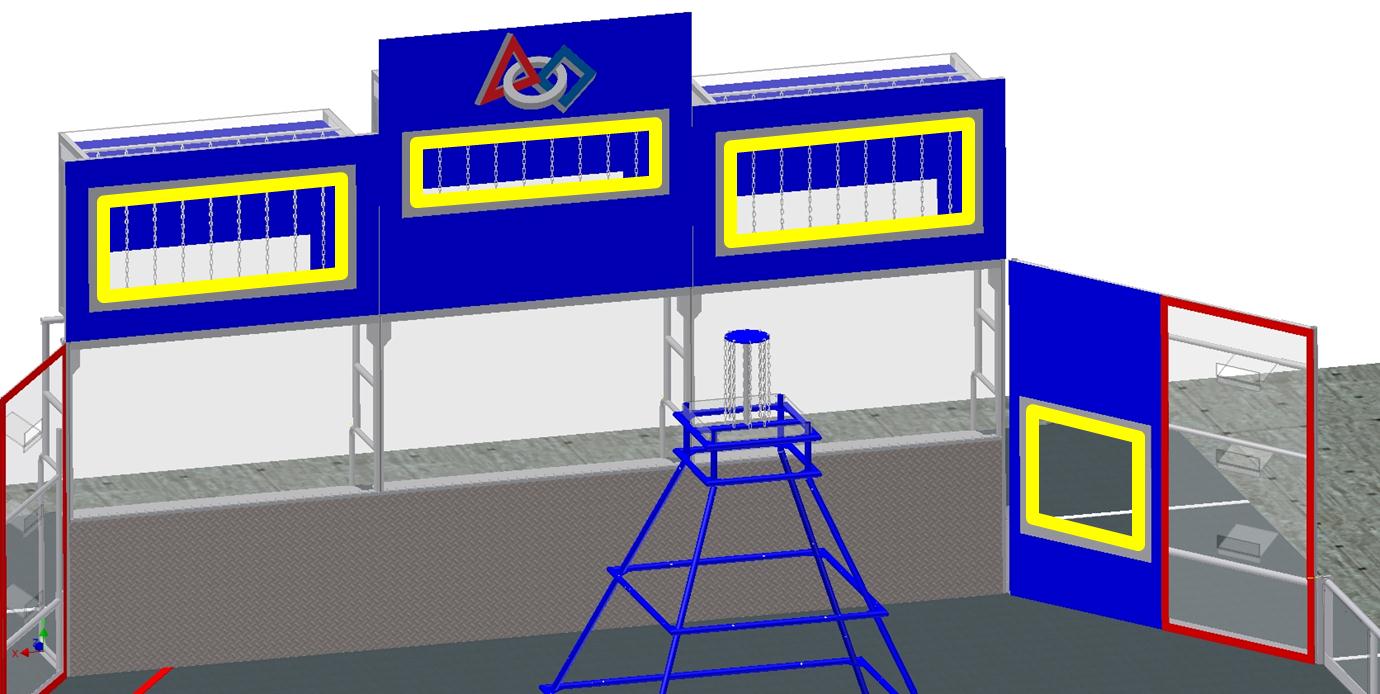
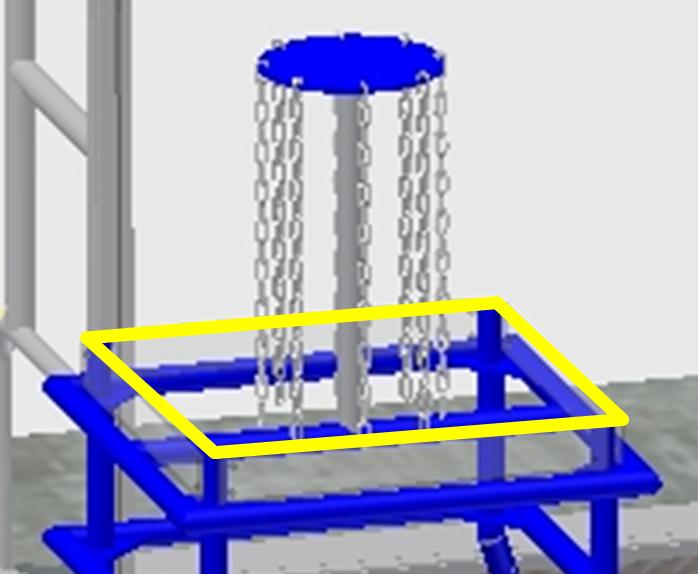
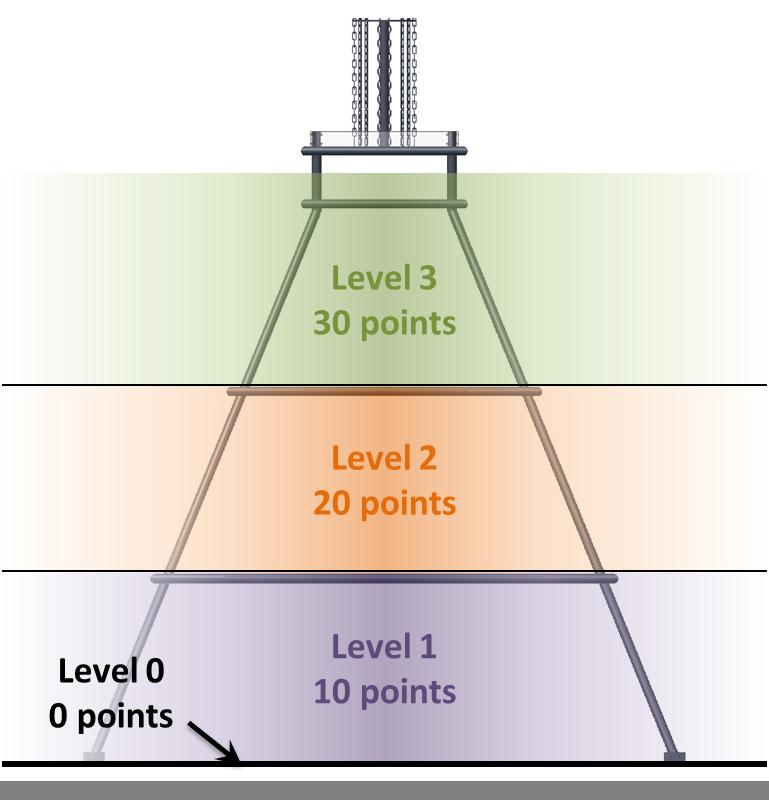
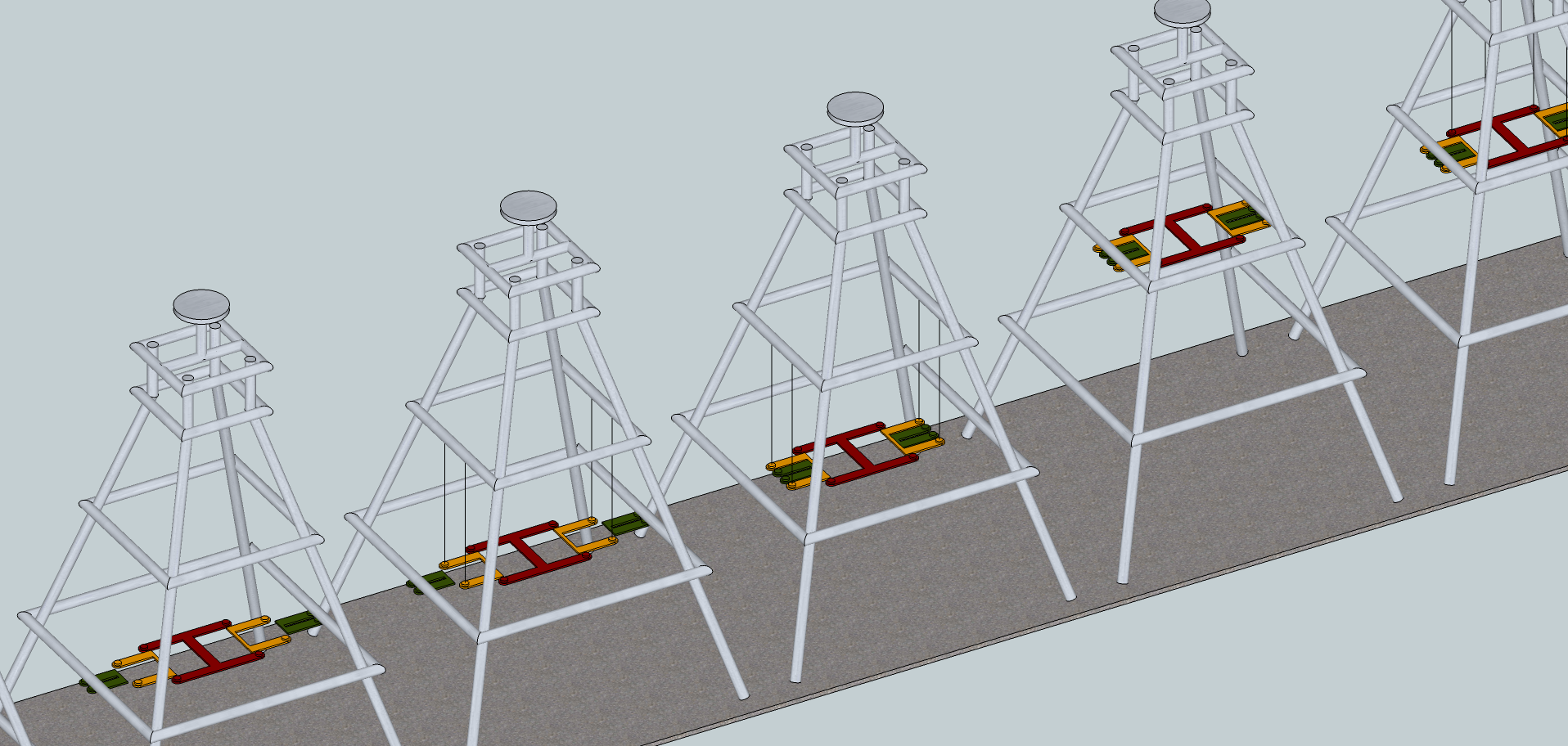
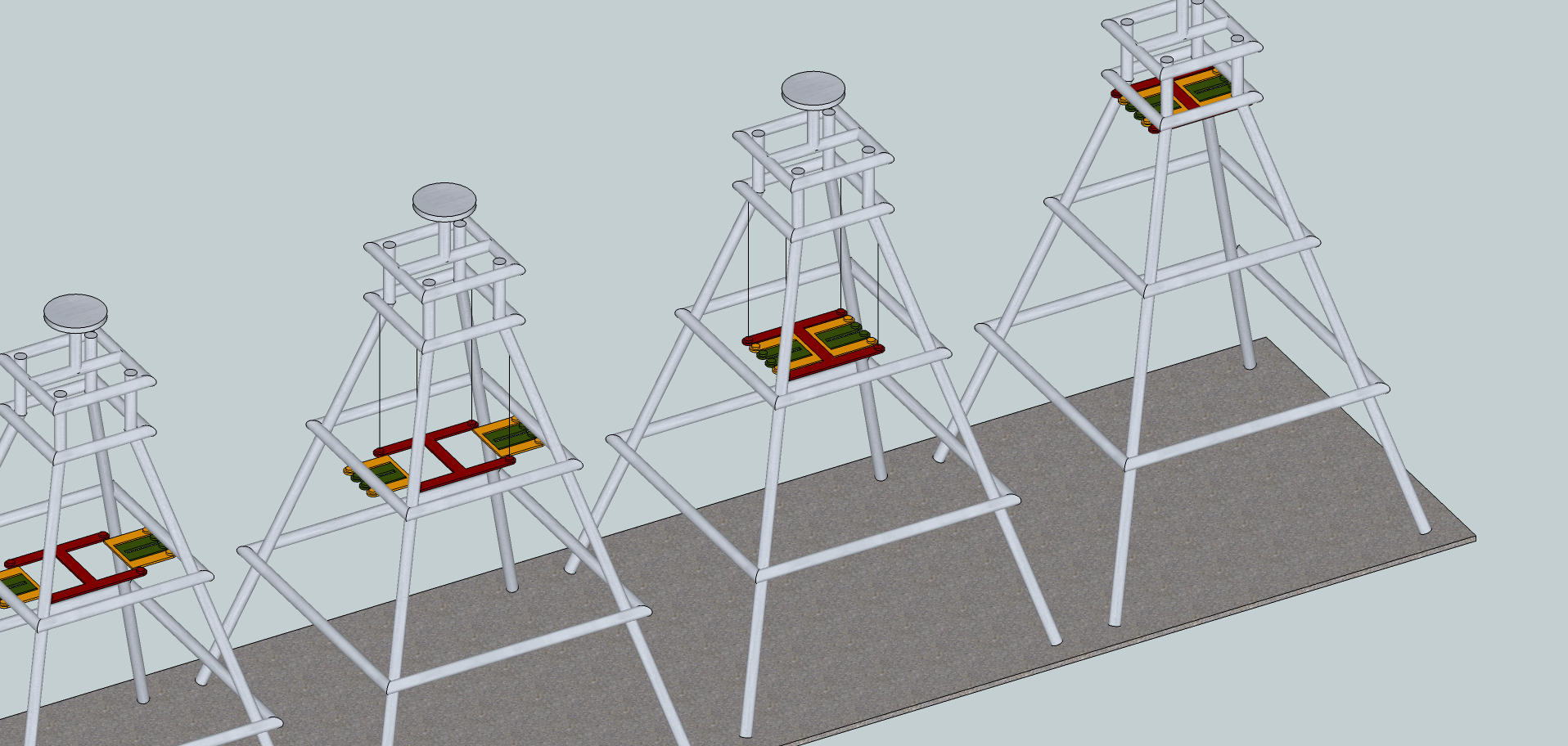
Sur un terrain il y'aura la pyramide qui est composee en 3 etages (des barres en metal) et le robot doit pouvoir monter au 3eme etage (ca serait bien ) en passant par le 1er et le 2eme etage. (Voir image joint)
Notre probleme est quel genre de systeme allons nous utiliser pour que le robot monte ces 3 etages ? sachant que le robot ne peux grimper au 3 etage directement.
Nous cherchons de notre cote.
si vous pouvez donner quelques idees cela serait tres gentil .
En tout cas merci et bonne journee.
Cordialement Dylan.