J'ai pour projet de réaliser un petit bras robotique animé par 4 servomoteurs.
Je souhaiterais obtenir une bonne finition mécanique histoire de pouvoir exploiter au maximum son potentiel!

Sachez que je fait imprimer les pièces pour obtenir un meilleur résultat.
Malheureusement, j'ai un profil plutôt informaticien et je bute un peut sur la conception mécanique. J'ai commencé à dessiner et imprimer mon robot en 3D, et globalement je m'en sort pas trop mal. Il y a néanmoins une chose que je n'arrive pas à résoudre. Je fais donc appel à vos talents de mécaniciens créatifs pour m'aider à trouver une solution fonctionnelle à mon problème.
Explication du problème :
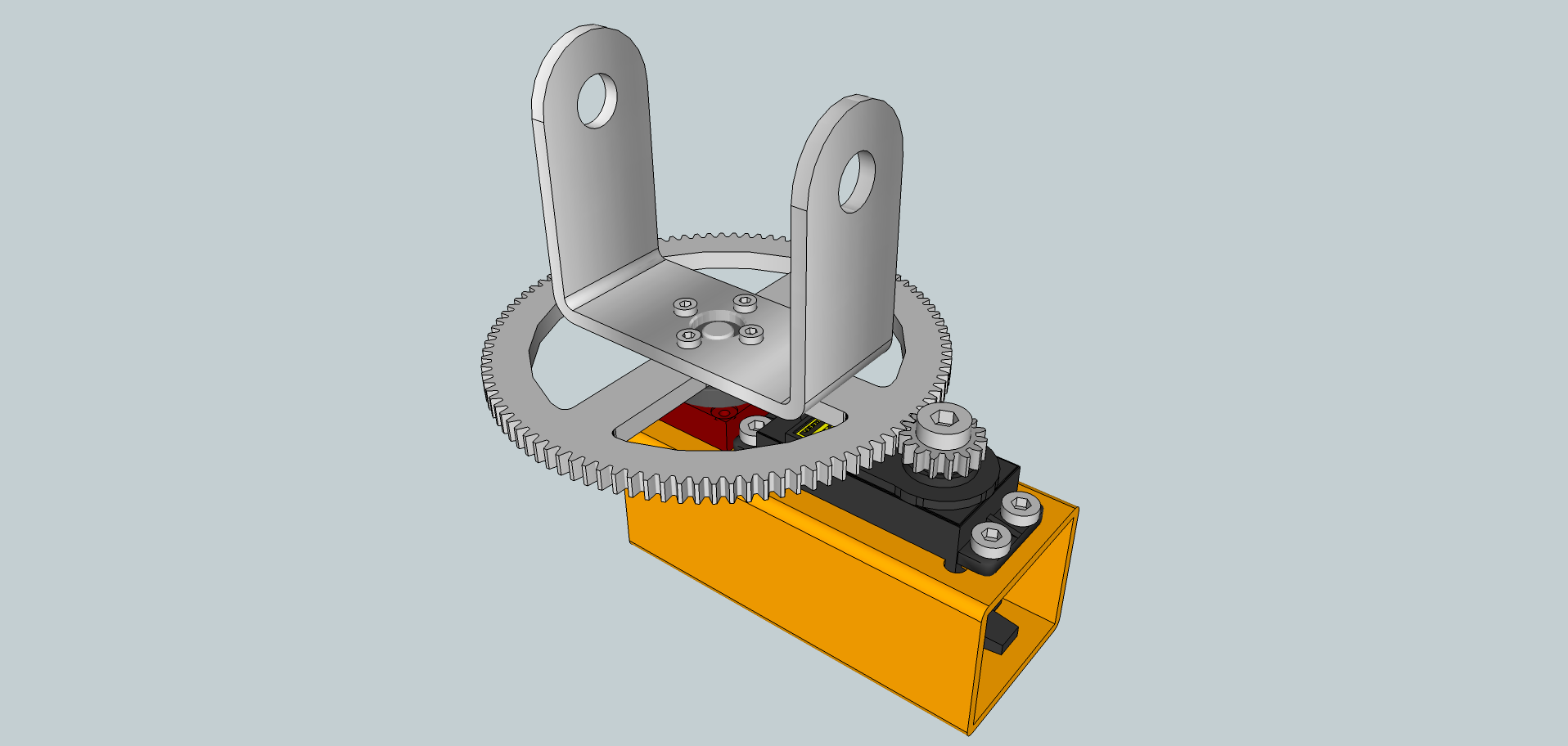
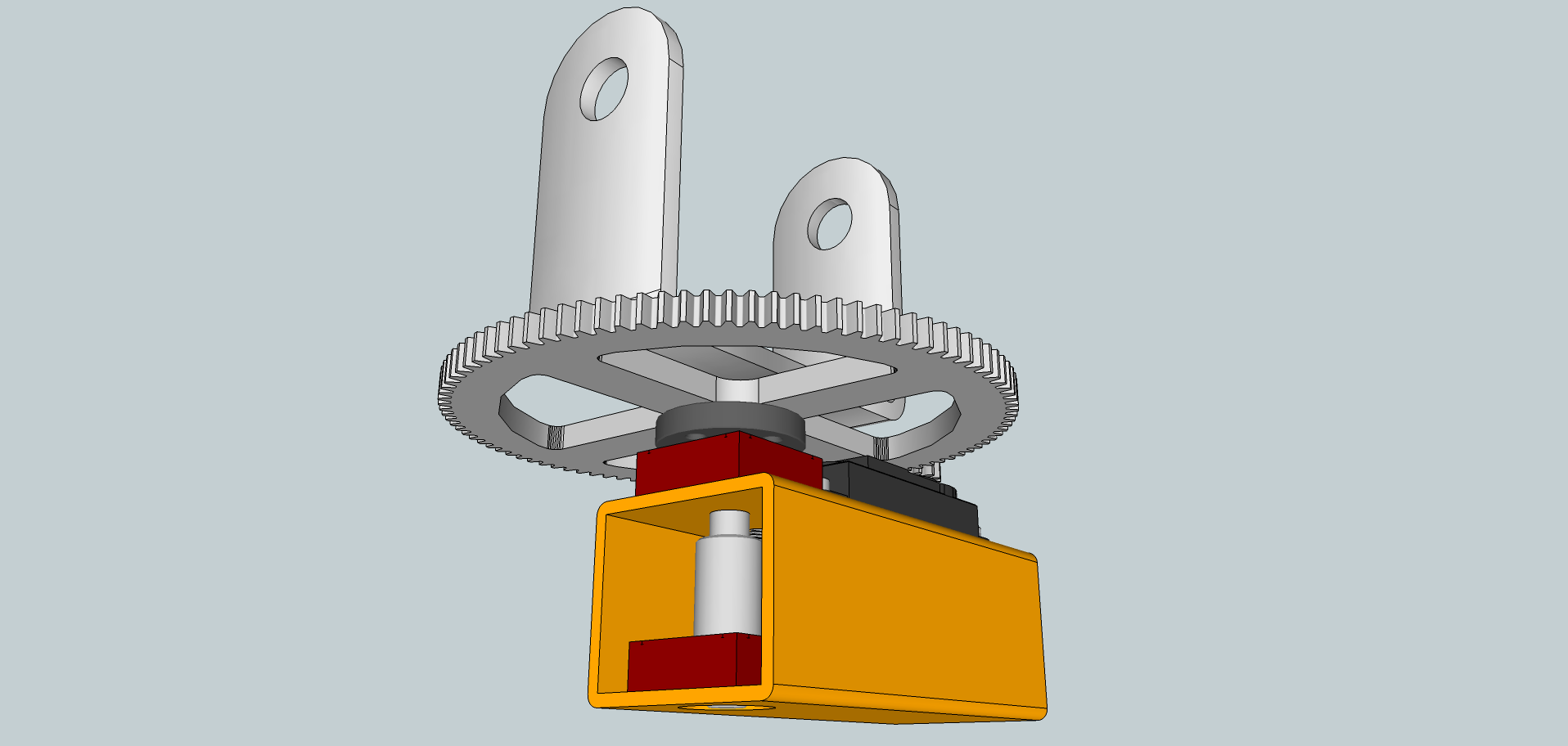
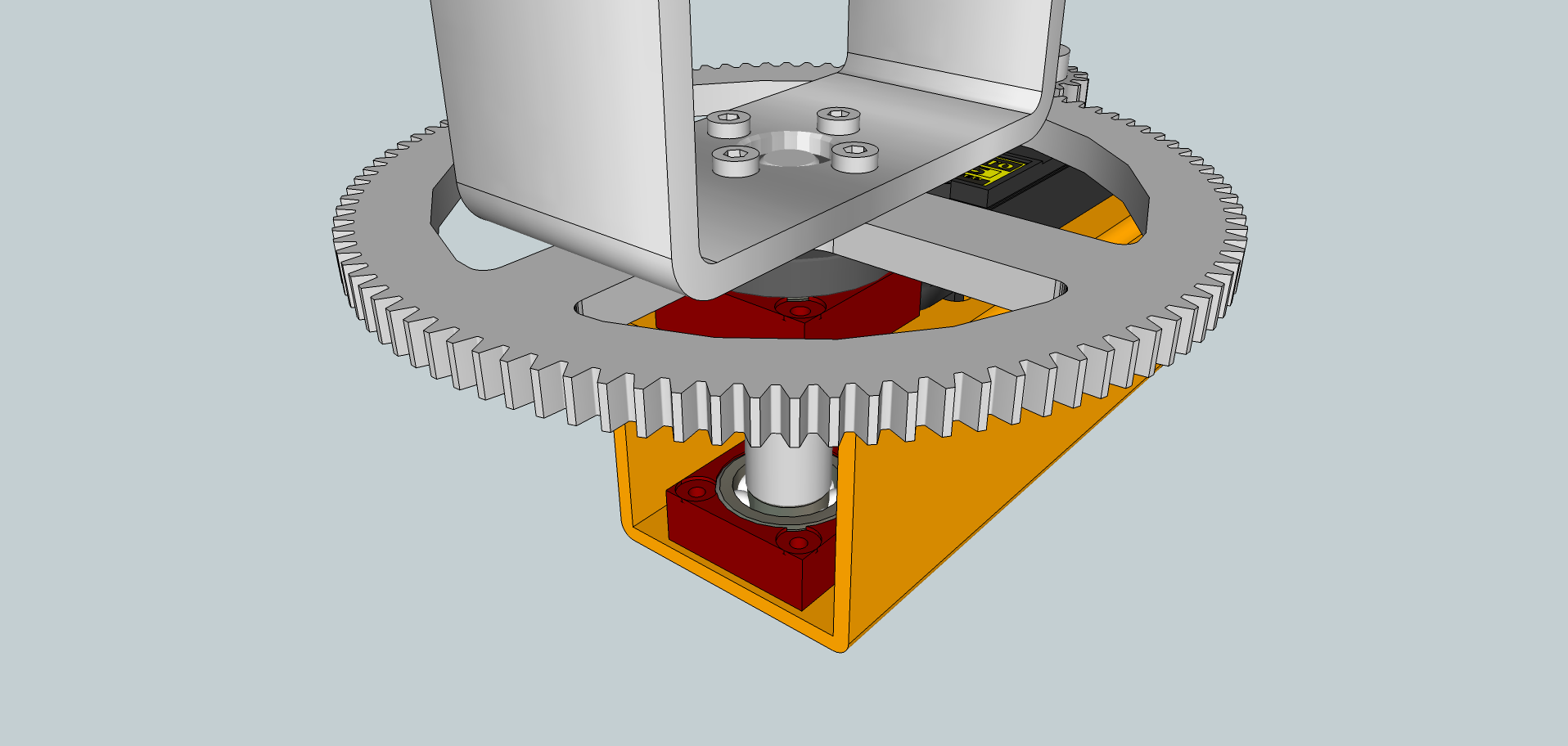
Avant toutes chose voici des petits dessins pour que vous puissiez mieux comprendre la forme des pièces:


J'ai pris soin d'enlever les boîtiers qui protègent les servomoteurs afin que vous puissiez mieux voir.

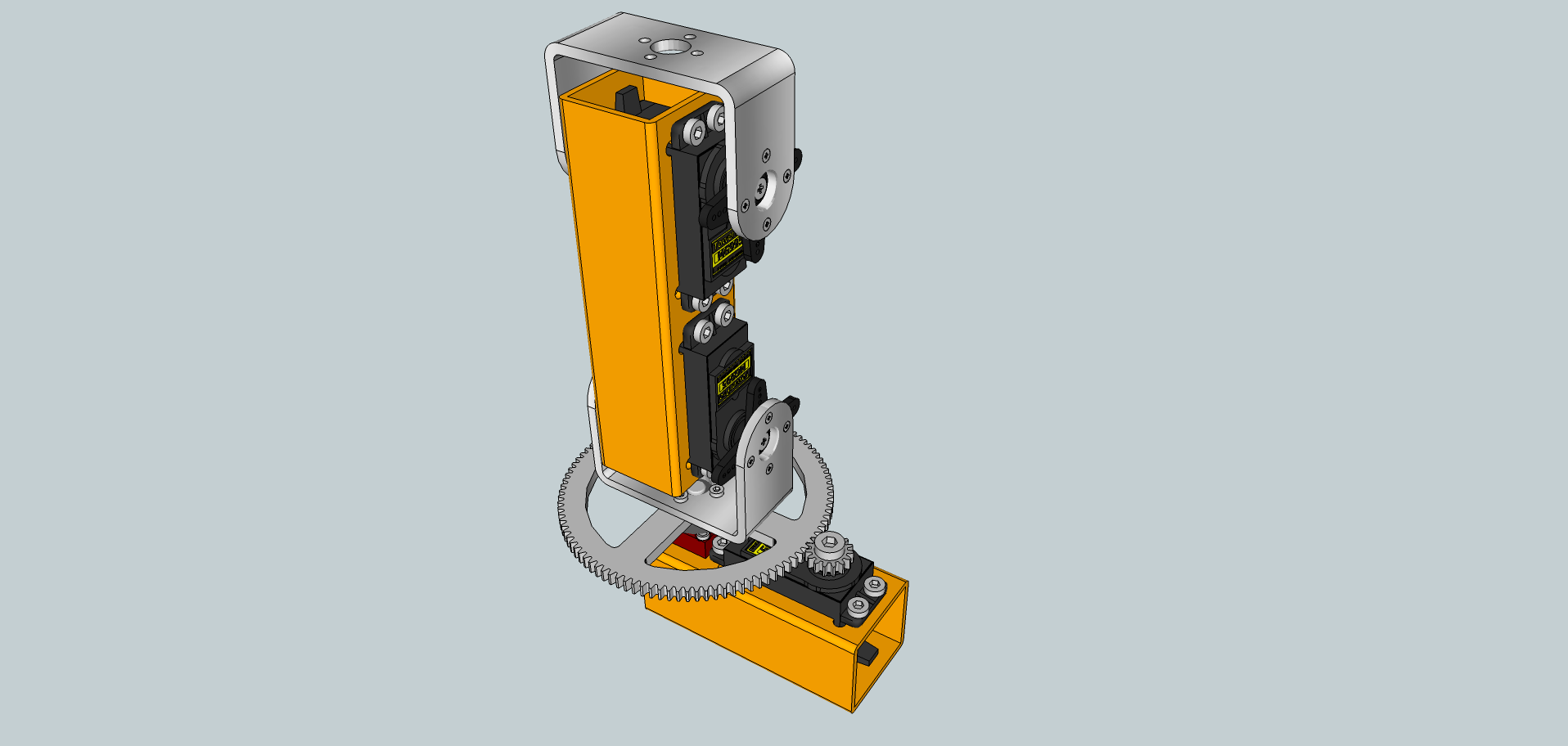
- La pièce blanche est fixé au axes des moteurs 1 et 2
- Le moteur 2 est fixé au moteur 3.
Maintenant imaginons que tous les servomoteurs soit bloqué ( étude statique ).
- La masse noire représente la partie fixe
- La flèche noire représente une force
- La flèche rouge désigne l'axe du moteur 1. Cet axe moteur subit un moment résultant de la force (flèche noir) et du bras de levier (moteur 2 et 3).
Problème 1 :
Apres avoir imprimé cette pièce blanche et monté le tout, je me suis rendu compte que la petite pièce en plastique noir qui ce fixe sur l'axe du moteur 1 ce tord facilement. Du coup le moteur 3 oscille énormément à chaque mouvement ou variation de charge. Il faudrait pouvoir limiter la torsion sur l'axe du moteur 1 en s'appuyant plutôt sur les boitier des moteurs.
Problème 2 :
Les câbles des moteurs 2 et 3 sont relié à une carte fixé au bâtis (du côté du moteur 1). En réalité les câbles sont même fixé contre le moteur 1 et lorsque le moteur 1 tourne il arrive que les câbles bloquent la rotation. Il faudrait qu'ils puissent passer par le centre de rotation en x (c.f. trièdre en bas à gauche) de la pièce blanche.
Problème 3 :
Les câbles des moteurs 2 et 3 sont visible au niveau de cette pièce blanche et donc vulnérable! Il faudrait qu'il soit entièrement caché et protégé par une coque!
J'espère que l'un d'entre vous a déjà rencontré ce genre de problématique et qu'il connais une solution à mon problème! J'imagine que le problème dois souvent ce poser pour des épaules de robot humanoïde ou autre!
J'attend vos réponses (et vos questions) avec impatience
Metabolik