Re
Je voudrais savoir si un robot qui apprend de ses expériences existe (C un sujet de renseignement) si oui combien il couterait. Et combien il couterait en analogique (la troisième question était presque inutile). Et svp ne sortez pas trop de blabla mais surtout des estimations
A+
Re Je voudrais savoir si un robot qui apprend de ses expériences existe (C un sujet de renseignement) si oui combien il couterait. Et combien il couterait en analogique (la troisième question était presque inutile). Et svp ne sortez pas trop de blabla mais surtout des estimations /> A+
Tu n'éviteras pas la casa bla bla avec moi
Un robot très simple qui apprend : un robot dans un espace fermé capable d'éviter un obstacle qui incrémente sa vitesse toute les minutes et qui décrémente sa vitesse à chaque fois qu'il rencontre un obstacle. Et lorsque la situation " incrémenter " puis décrémenter puis incrémenter se fait x fois de suite il garde en mémoire la vitesse max qu'il peut avoir...
Ce genre de truc peu se faire pour une cinquantaine d'euro en coût composant du robot, et environ 50 euros en coup matériel nécessaire ( matériel qui lui est réutilisable pour d'autres robots. ) en analogique pour un truc simple comme ça c'est aussi possible je dirais que ça coûterais aussi cher a quelque euros près.
Par contre à partir du moment ou du augmente la complexité tu passe vite à la gamme au dessus avec genre plus du 100 euros en coût composant.
Les estimations que je donne c'est pour de la robotique en réel amateur pas de la superbe qualité de réalisation !
Au fait ce que je veux dire par robot qui modifie son comportement en fonction de son expérience : c'est-à-dire par exemple un robot qui reconnais les personnes qu'il rencontre et qui leurs saluts en fonction de la réaction des personnes lors de leurs dernières rencontres (ils les classes dans différentes catégories)
Évidement dans cet exemple il devra avoir une caméra qui ai une bonne résolution d'image pour pouvoir détecter les traits du visage , avoir une main motorisé pour qu'il puisse serrer la main , avoir un module qui puisse enregistrer le son (pour enregistrer les prénoms) et un micro processeur puissant...
C'est plus du tout la même gamme de prix x)
caméras, bras etc... là tu peux mettre autant que tu veux tout dépend du niveau de compléxité! Mais cela sera très difficile en dessous de 500 euros ... et encore c'est uniquement en cout composant pour le produit final. Par contre coût développement ça peut coûter autant et même plus ... Surtout si tu fais développer par quelqu'un d'autre ...
Moi ça ne m'étonnerais pas que sans donner plus d'indications on puisse te proposer des pris entre 500 et 5000 euros ... Sache que Nao c'est environ 2000 euros de composant 1000 euros de main d'oeuvre et de transport et 1 000 000 euros en coût de développement ... Du coup c'est vendu à environ 12 000 euros le Nao ...
Re Je voudrais savoir si un robot qui apprend de ses expériences existe (C un sujet de renseignement) si oui combien il couterait. Et combien il couterait en analogique (la troisième question était presque inutile). Et svp ne sortez pas trop de blabla mais surtout des estimations /> A+
Oui, ça existe (on y travaille). Mais d'un autre côté, il n'y a pas de lien direct entre la capacité d'apprendre et le prix. D'une part parce que les robots vraiment capables d'apprentissage sont rarement commercialisés (en tout cas vers le particulier), d'autre part parce qu'un robot à moins de 100 peut apprendre (des choses plus ou moins compliquées en fonction de ses capteurs). Je ne sais pas dans quelle mesure ça serait faisable en pur analogique, mais ça me semble d'un intérêt limité (en tout cas à l'heure actuelle). Pour en revenir à ton exemple, et comme l'a dit Mike118, un robot possédant une caméra correcte et un actionneur en correspondance, ça doit coûter facilement 500 (une tête avec deux caméras orientables se vend environ 300 ). Un robot complet, on tape facilement dans les 10k. Mais comme je l'ai dit, la capacité d'apprendre et le prix du robot ne sont pas directement liés.
Et c'est normal qu'on blablate, tes questions ne sont pas vraiment précises ...
Re
Je pense que faire apprendre de son expérience il faudrait qu'il reconnaisse s'il fait bien ou pas bien son action mais pour qu'il s'auto programme je me demande le script que cela pourrait être : une liste d'erreurs avec une liste de solutions associé ou alors un test aléatoire de mouvements puis un classement action neutre , bonne , mauvaise puis une consultation constante de ce tableau et comparaisons des situations et de la situation au moment présent.
Merci de vos réponses mais à vos avis , de nos jours les jeux vidéo on de bonnes IA , est-ce exploitable ? Pourrait-on utiliser (en modifiant) une partie d'un script d'un jeu (type sims)?(perso j'y crois pu)
A+
Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 01 mars 2013 - 03:47
@clem494949
Je pense u'il est préférable que tu essayes par toi même de te confronter au problème ... Essais de faire l'exemple simple que je t'ai présenter en premier pour commencer !
Tu peux le réaliser ou tout simplement le simuler ...
Re Je pense que faire apprendre de son expérience il faudrait qu'il reconnaisse s'il fait bien ou pas bien son action mais pour qu'il s'auto programme je me demande le script que cela pourrait être : une liste d'erreurs avec une liste de solutions associé ou alors un test aléatoire de mouvements puis un classement action neutre , bonne , mauvaise puis une consultation constante de ce tableau et comparaisons des situations et de la situation au moment présent. Merci de vos réponses mais à vos avis , de nos jours les jeux vidéo on de bonnes IA , est-ce exploitable ? Pourrait-on utiliser (en modifiant) une partie d'un script d'un jeu (type sims)?(perso j'y crois pu) A+
La seconde idée que tu décris est bien représentée par une expérience de Motor Babbling : on laisse le robot découvrir lui-même comment commander ses roues / pattes / etc pour atteindre un objectif (par exemple, marcher). Au fur et à mesure qu'il expérimente des commandes, il apprend que certaines actions sont intéressantes et d'autres non. Si tu es prêt à découvrir ce champ de l'apprentissage, tu dois te renseigner sur le "reinforcement learning". Une version "model-free" de ces algorithmes permet de réaliser l'expérience que j'ai décrit (d'ailleurs, l'implémenter sur mon robot fait partie de mes objectifs />).
Pour ce qui est de l'IA de jeu vidéo, il est probable que les méthodes utilisées soient relativement classiques et ne touchent pas à de l'apprentissage. Cela dit, il existe des jeux (en général plutôt simple) qui sont construits autour de cette idée de coder une IA pour un agent.
RE
merci, je pense que j'aimerais faire en plus un robot qui se déplacerait sur un rebord d'un mur ou autre à voir : je pourrais fusionner mes idée.
Je pense que faire en sorte que le robot apprend tout seul comment se déplacé serait dangereux (surtout avec mon double projet), peut impressionnant , éphémère (à par avec le bouton reset mais bon avec le thème c'est évident) et cela ne me branche pas trop.
Apprendre à faire ce que l'homme ne peut pas faire (pas le ménage ) serais d'après moi compliqué.
Donc une simple tache que le robot fera de mieux en mieux.Par exemple mon clavier d'ordi est placé sur le rebord d'une "plaque télescopique" .Le robot pourrait se déplacer sur le rebord et appuyer sur les touches de l'ordi dans un ordre bien précis et comme l'homme au début il balaye du regard le clavier pour trouver la touche puis peu à peu il commence à connaitre la position des touches jusqu'à éteindre sa caméra pour économiser sa batterie .
Et aussi j'idée de placer un bouton reset (normal) , pouce vert (dire que se qu'il fait est bien et donc rien changer dans son évolution) , pouce rouge (dire qu'il fait des conneries (donc peu être inutile) et demande de ralentir(si appuyé un fois) demande de reculer d'une étape ( si appuyé deux fois en 3 minutes sans interruption par un pouce vert).
Merci de vos réponses et à termo_nono(s ) pour m'avoir informé de la présence d'un tutoriel
(...) Je pense que faire en sorte que le robot apprend tout seul comment se déplacé serait dangereux (surtout avec mon double projet), peut impressionnant , éphémère (à par avec le bouton reset mais bon avec le thème c'est évident) et cela ne me branche pas trop. Apprendre à faire ce que l'homme ne peut pas faire (pas le ménage />/> ) serais d'après moi compliqué.
Apprendre tout seul à se déplacer sur un rebord (donc éviter de tomber) ? C'est effectivement dangereux pour le robot selon la hauteur. Par contre, tu peux lui faire apprendre à éviter les murs en lui donnant des capteurs de contact, des capteurs de distance et en maîtrisant la vitesse avec laquelle il heurte les murs. Et c'est beaucoup plus marrant de lui faire apprendre que de le pré-câbler. Et pas besoin d'un algo génétique pour ça. Par contre, clairement, l'apprentissage sera éphémère : une fois que la notion est apprise, elle est apprise, et à moins de rajouter un terme d'oubli, elle restera apprise. Mais c'est ce qui se passe chez l'humain pour une majorité de compétences et de connaissances. Apprendre à faire ce que l'homme ne peut pas faire n'est pas forcément compliqué : le robot est différent de l'homme dans sa structure, et un robot volant peut apprendre à faire des choses que l'homme est incapable. À tâche égale, le robot n'apprendra peut-être pas de la même manière que l'homme (c'est même quasi-sûr), mais il pourra, s'il dispose des capteurs / actionneurs adaptés, et que son algo lui laisse les libertés qu'il faut.
Donc une simple tache que le robot fera de mieux en mieux.Par exemple mon clavier d'ordi est placé sur le rebord d'une "plaque télescopique" .Le robot pourrait se déplacer sur le rebord et appuyer sur les touches de l'ordi dans un ordre bien précis et comme l'homme au début il balaye du regard le clavier pour trouver la touche puis peu à peu il commence à connaitre la position des touches jusqu'à éteindre sa caméra pour économiser sa batterie .
C'est une tâche faisable, bien qu'à mon avis compliquée. Si tu réduis le problème en donnant au robot un clavier simplifié (disons 5 interrupteurs associés à une led - pour que le robot puisse percevoir quand il a appuyé sur la touche), tu facilites un peu les choses. Par contre, en termes de mécanique du robot, de l'électronique associée, du traitement de l'image, de calcul de la sortie motrice du robot, ça représente un certain nombre de jours de travail. Et vu que ce que tu décris est plus ou moins l'habituation du robot à la position des lettres du clavier, je peux te dire qu'il y a des modèles qui cherchent à décrire le fonctionnement du cerveau pour cette tâche. Si ça t'intéresse :[Keramati et al. 2011] (anglais). Bon courage pour implémenter ce modèle. Je serais très curieux de voir le résultat. />
Et aussi j'idée de placer un bouton reset (normal) , pouce vert (dire que se qu'il fait est bien et donc rien changer dans son évolution) , pouce rouge (dire qu'il fait des conneries (donc peu être inutile) et demande de ralentir(si appuyé un fois) demande de reculer d'une étape ( si appuyé deux fois en 3 minutes sans interruption par un pouce vert). Merci de vos réponses et à termo_nono(s />/> ) pour m'avoir informé de la présence d'un tutoriel
Pouce vert / Pouce rouge -> Apprentissage par renforcement.
RE
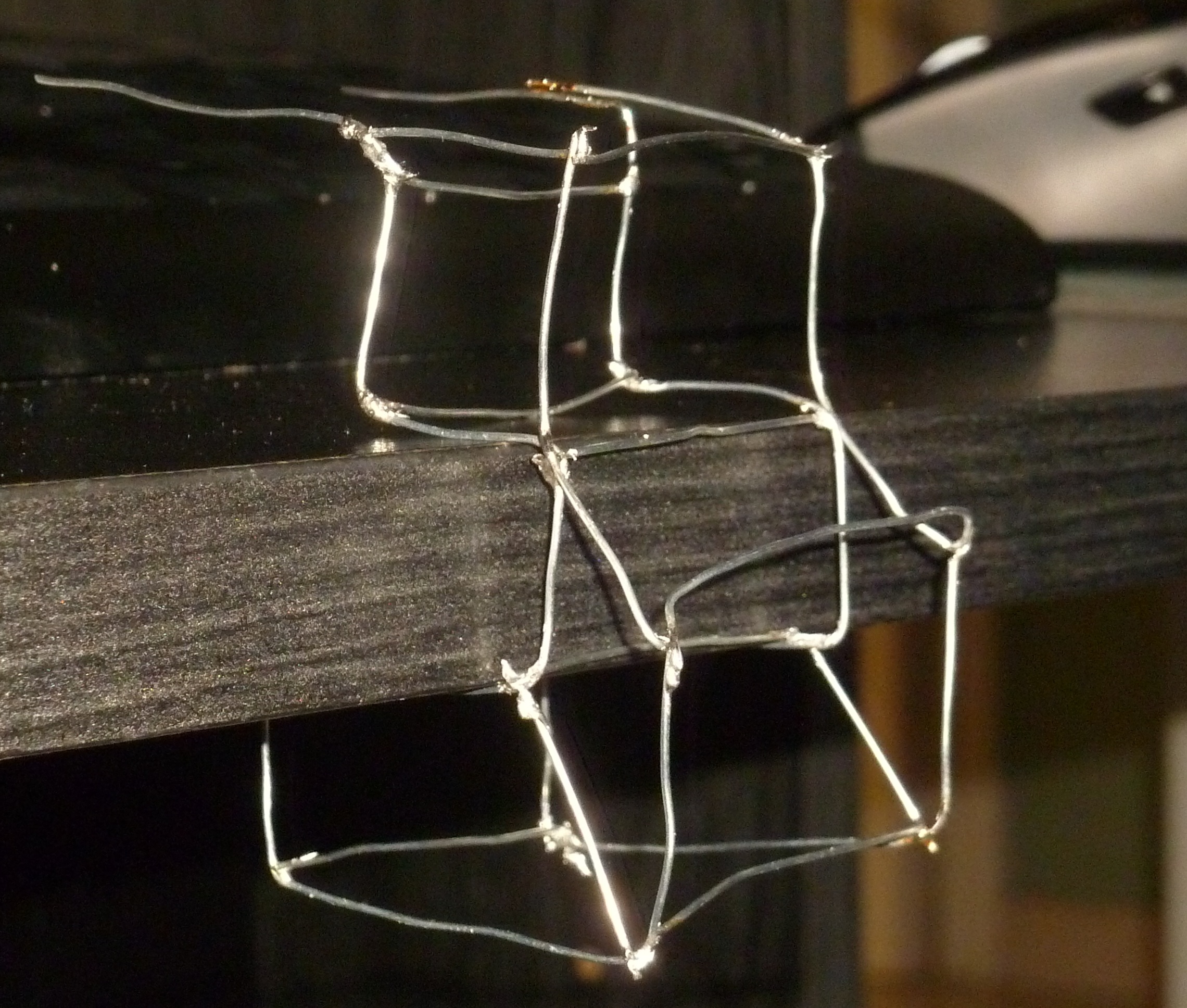
Même si je ne suis pas sur de faire ce robot je me suis amusé à construire une structure simpa qui vous montrera à quoi je pense
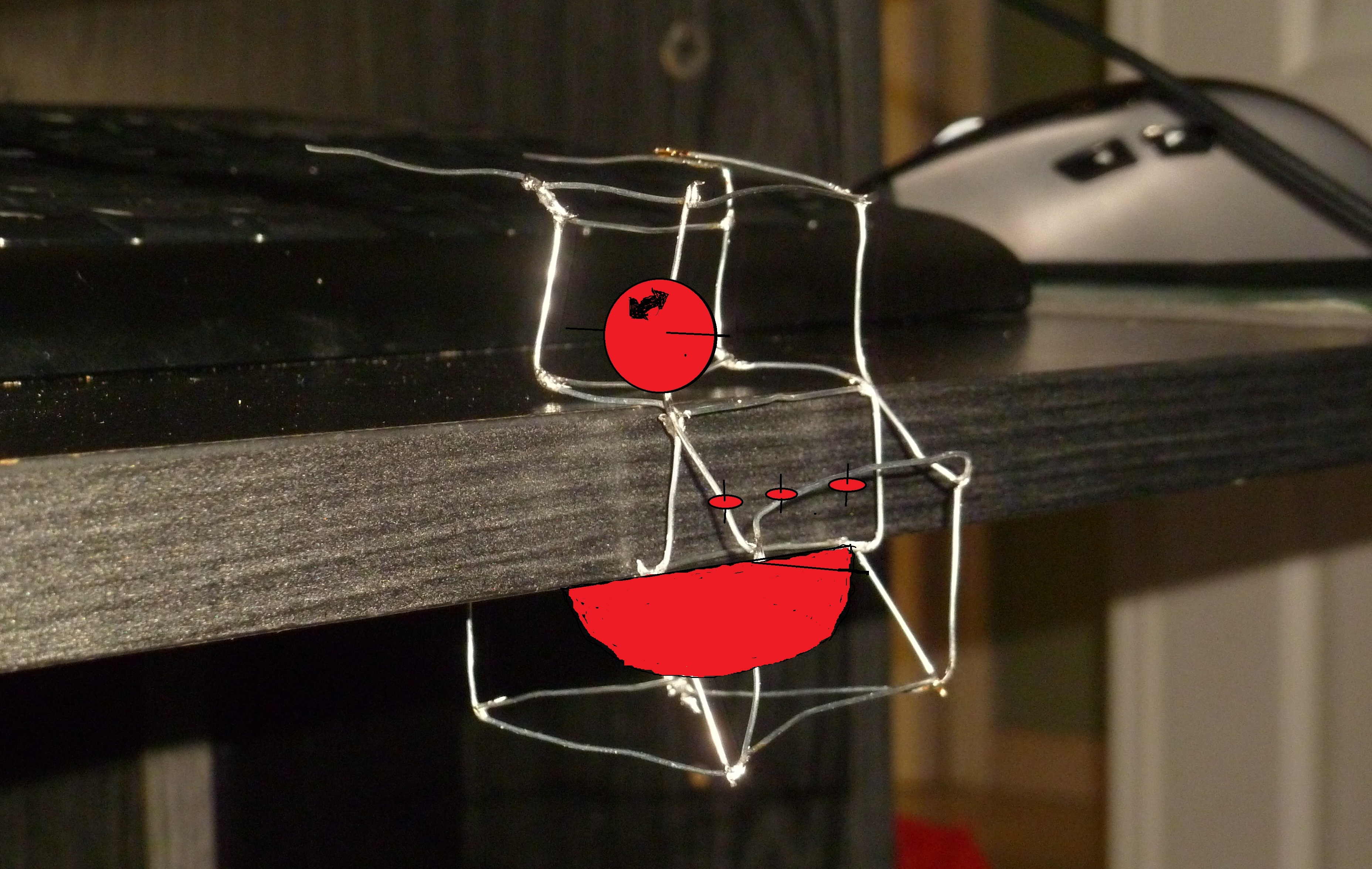
avec les roues (en image de synthèse haute définition réalisé par un logiciel utilisé dans les films d'action : paint )
La roue du dessous est mal faite mais tant que vous comprenez la forme de la machine et l'emplacement des roues cela sera bon.
une autre image :
(Ma parole, j'étais aussi obtus à 14 ans ?):
mais je ne suis pas butté, si ?
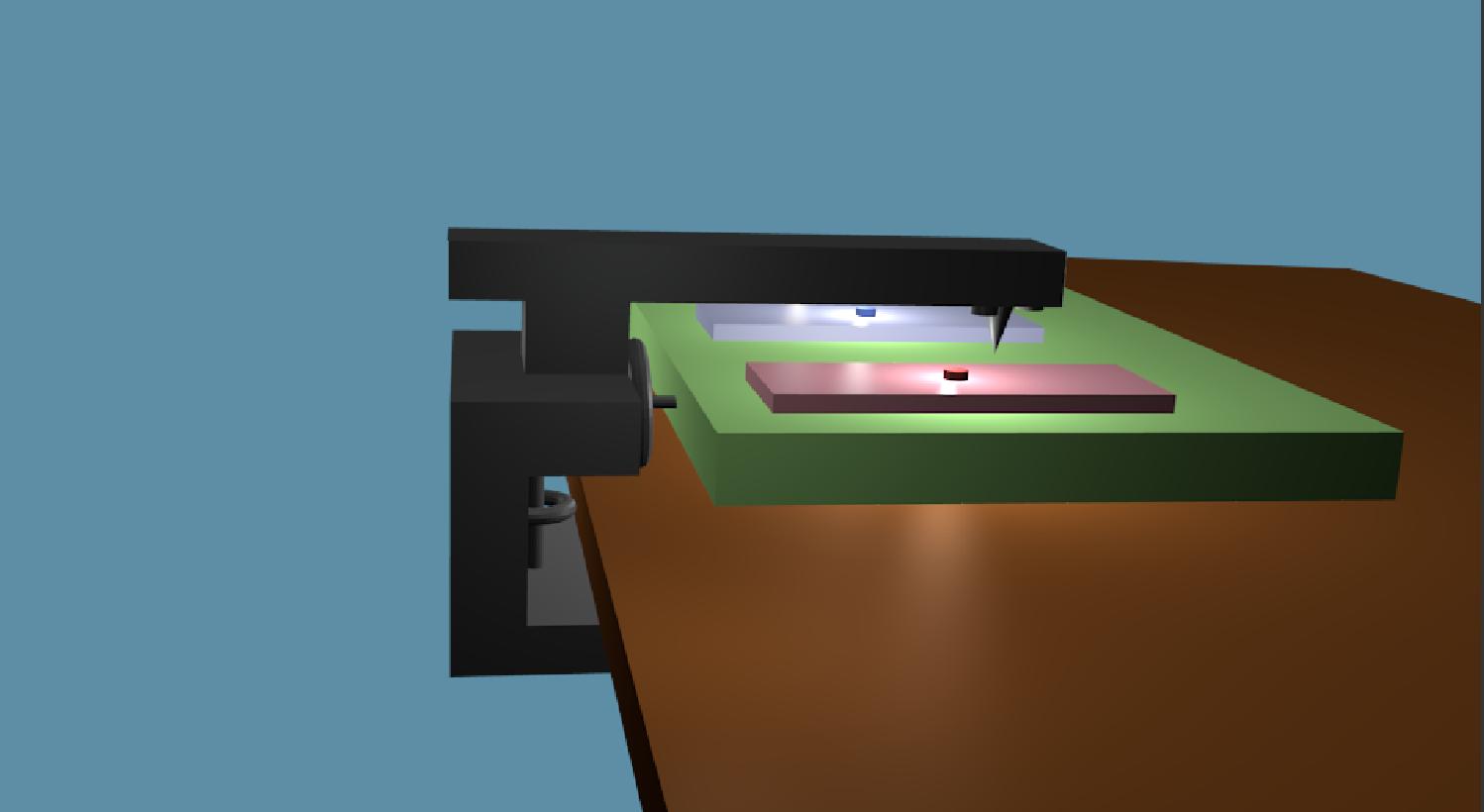
Quoi qu'il en soi je vient de téléchargé Blender et je vais suivre le tutoriel du site du zéro
Revenons sur la partie théorique :
Appuyer sur 5 boutons ne m'a l'air pas impressionnant mais bon il faut aussi être raisonnable
Les sites que vous m'avez donné sont évidemment en anglais et comportes des termes mathématique qui m'on l'air étrange malgré l'aide de ma soeur qui est en prépa (de plus le traducteur google bug chez moi) mais bon je finirais par finir de traduire mot à mot par moi même mais comme un enfant de 3 ans j'ai admiré les images
Pour ce qu'il est de lapprentissage de déplacement (détection des mur) c'est mon robot et je trouve que c'est dangereux quand même et pour ce qu'il est du drone qui apprend à voler c'est encore pire déjà que moi je n'arrive par à faire voler mon hélicoptère faite le si vous le voulez mais pas moi
Au fait je me suis pas attardé sur la question mais Arduino peut générer des nombres aléatoire et aussi Arduino est-t-il un module assés puissant pour réaliser ce projet ? si non quel type de module faut-t-il ? un Arduino spécial comme Arduino Méga 2560 ou autre ?
Le bouton pouce vert et pouce rouge c'est pour éviter de rajouter plein de capteur pour savoir si les actions du robot sont bonne mais bon c'est vrais que cela est inutile .
Au fait pouvez vous me donner un lien sur un robot qui se déplace sur un rebord que vous auriez vu (je cherche de mon côté).
Je crois que c'est tout .
A+
Revenons sur la partie théorique : Appuyer sur 5 boutons ne m'a l'air pas impressionnant mais bon il faut aussi être raisonnable Les sites que vous m'avez donné sont évidemment en anglais et comportes des termes mathématique qui m'on l'air étrange malgré l'aide de ma soeur qui est en prépa (de plus le traducteur google bug chez moi) mais bon je finirais par finir de traduire mot à mot par moi même mais comme un enfant de 3 ans j'ai admiré les images />/>
C'est bien normal qu'il y ait des termes étranges dans ce papier : il y a des notions et des algorithmes que tu n'as pas encore vu au lycée. Si les équations sont compréhensibles par un préparationnaire, ça n'est sûrement pas le cas pour le fonctionnement global. Et ta soeur a sûrement mieux à faire que de passer du temps sur un article de recherche d'un domaine qui ne l'intéresse probablement pas.
Pour ce qu'il est de l’apprentissage de déplacement (détection des mur) c'est mon robot et je trouve que c'est dangereux quand même et pour ce qu'il est du drone qui apprend à voler c'est encore pire déjà que moi je n'arrive par à faire voler mon hélicoptère faite le si vous le voulez mais pas moi
Apprendre à ne pas rentrer dans les murs n'est pas très dangereux dès lors que c'est fait avec une vitesse raisonnable. Ca n'est qu'un exemple de ce qui est facilement faisable avec ce genre de système et qui peut être amusant (à mon sens).
Au fait je me suis pas attardé sur la question mais Arduino peut générer des nombres aléatoire et aussi Arduino est-t-il un module assés puissant pour réaliser ce projet ? si non quel type de module faut-t-il ? un Arduino spécial comme Arduino Méga 2560 ou autre ?
Une carte Arduino peut générer des nombres aléatoires. Une carte Arduino ne peut pas traiter un flux vidéo. Tout est décrit dans la documentation (une version en français est disponible en ligne). Lis les autres sujets du forum, tu auras des réponses.
Le bouton pouce vert et pouce rouge c'est pour éviter de rajouter plein de capteur pour savoir si les actions du robot sont bonne mais bon c'est vrais que cela est inutile .
Je n'ai pas dit que c'était une mauvaise idée. J'ai juste dit qu'un outil pour exploiter ce concept, c'est l'apprentissage par renforcement. Ce qui est lié à ta question du début : avoir un robot qui apprend. Par contre, il faut que tu comprennes qu'un robot a BESOIN de capteurs, comme toi tu as besoin de tes yeux, de tes oreilles, etc. pour percevoir ton environnement. Des boutons peuvent être des capteurs de contacts avec un obstacle ou de toucher par l'utilisateur. Mais ce n'est pas le fait d'avoir "plein de capteurs" qui permettra au robot de savoir si ses actions sont bonnes ou pas. C'est le traitement que tu en fais.
Au fait pouvez vous me donner un lien sur un robot qui se déplace sur un rebord que vous auriez vu (je cherche de mon côté).
Honnêtement : fixe-toi un projet simple qui te permette d'apprendre l'électronique, la mécanique, l'informatique, l'anglais. Une fois que tu auras des bases suffisantes dans tout ça, tu verras mieux comment faire des projets plus complexes. Là, je pense qu'il te manque beaucoup de connaissances pour avoir idée de ce que tu fais et comment.
Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 04 mars 2013 - 04:06
Je suis parfaitement d'accord avec R1D1, par contre je ne rajouterais qu'une chose : vu que tu es motivé, tu vas forcément réussir à faire des trucs sympathiques /> Donc continu comme ça, persévère toujours ( sans être buté /> ) et tu apprendra ce qu'il te faut pour aller là où tu le souhaite =) Ne t'attends cependant pas à ce que ça vienne en claquant des doigts, ça prendra le temps qu'il faudra mais ça le fera à bientôt !
RE
Ouille 80 je n'avais pas du tout pensé à cela http://www.lextronic.fr/P1890-module-de-reconnaissance-video-cmucam4.html
Je crois que ce robot sera mon robot ultime .
Et qu'il aura 5 fonctions :
Éviter les mur
Télécommandé par bluetooth
Suiveur de ligne et va chercher la balle
Itinéraire prédéfini
Et enfin la fonction apprentissage
Je pense que le robot coutera environ 180 voir plus (130 sans les capteur, servomoteurs et avec une arduino standard).
Donc! L'apprentissage :
Le robot doit faire une tâche et comme j'utilise une caméra avec sur module à 80 je pourrais lui faire classer des bout de bois de forme différent sur les photos des formes ( utilisation des capteurs de distance pour savoir si la forme à l'image de la caméra sont des bouts de bois ou des photos) et le robot les déplace avec une sorte de pelle de tractopelle
Ce projet est lieu ?
A+
:-)
Interests:Monde UNIX, Développement Web, Jeux Vidéo & tout se qui touche à l'électronique
Posté 04 mars 2013 - 09:34
RE Ouille 80 je n'avais pas du tout pensé à cela http://www.lextronic.fr/P1890-module-de-reconnaissance-video-cmucam4.html Je crois que ce robot sera mon robot ultime . Et qu'il aura 5 fonctions : Éviter les mur Télécommandé par bluetooth Suiveur de ligne et va chercher la balle Itinéraire prédéfini Et enfin la fonction apprentissage Je pense que le robot coutera environ 180 voir plus (130 sans les capteur, servomoteurs et avec une arduino standard). Donc! L'apprentissage : Le robot doit faire une tâche et comme j'utilise une caméra avec sur module à 80 je pourrais lui faire classer des bout de bois de forme différent sur les photos des formes ( utilisation des capteurs de distance pour savoir si la forme à l'image de la caméra sont des bouts de bois ou des photos) et le robot les déplace avec une sorte de pelle de tractopelle Ce projet est lieu ? A+ :-)
Simple question, Tu sais juste la difficulté de réalisé un code qui te convient pour ton robot ? ^^ et arduino ne fait pas le traitement d'image... Cdt geek maxou
RE
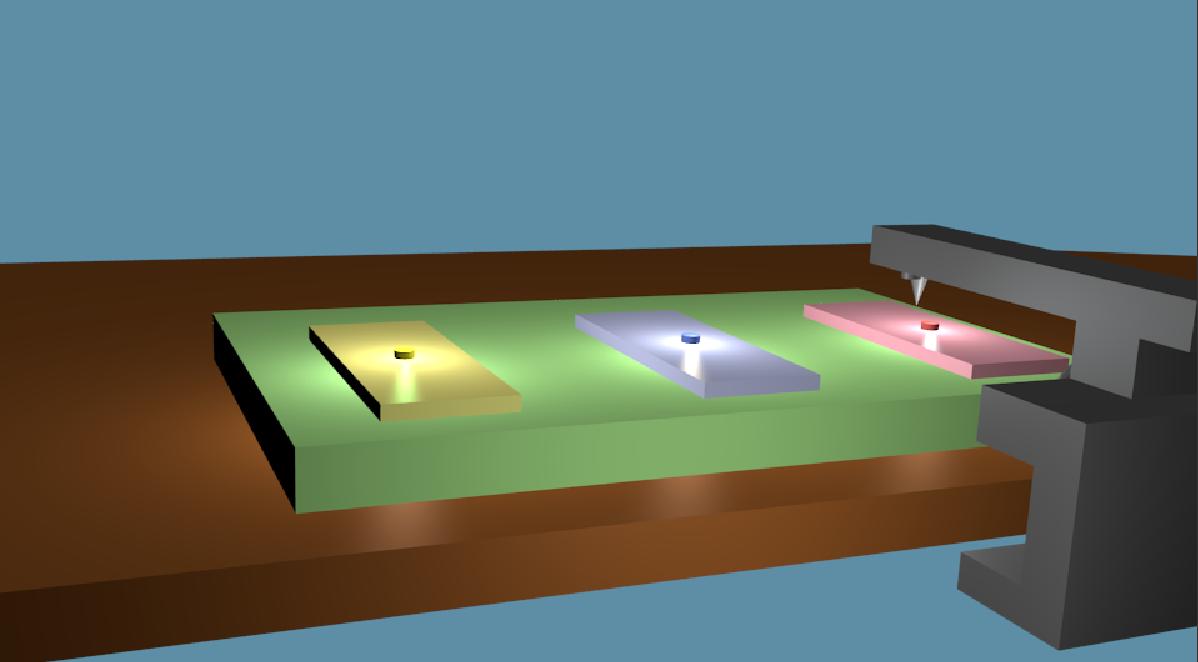
Sinon je fais mon pauvre et je le fait appuyer sur trois touche (avec l'anciène version) qui ont une led bleu rouge et jaune et je met au bout du bras du robot trois resistances réagisants à la lumière avec un filtre rouge, bleu et jaune ( pas de camera et de module cher)
Vous pensez que ma solution fonctionne ?
Pour les autres capteurs, je vais pas les mettre et je ferais en sorte qu'il soit en sécurité.
Au final ce qu'il m'interesse dans ce robot c'est le code pas le robot.
Cela fera 25 +20+10 de marge=55 sauf que je vais utiliser la même carte arduino que pour le projet précédent donc 55-12.25=42.25 et je peut utiliser un moteur standard pour le bras 42.5-5=37.5 et pour les petits filtres j'en ais deja dans le coffret de chimiste .
A oui j'ai oublié le clavier, il faut un petit clavier 3 touches qui soit aussi fonctionnel qu'un vrais mais là j'ai une nexus 7 qui peut suffir en utilisant une apk fait maison ( c'est bien ce forum , il me permet d'apprendre un logiciel 3D, plus sur la programation,à faire des robots, à faire des apk tablettes .Je n'aurais jamais eu l'idée tous seul de faire des apk tablette) en luminosité max elle devrait suffir..
Et évidement il me manque les roues dont seul la roue supérieur est mautrice.Je vien de finir de lire le tuto sur blender je vais modéliser le robot aussi vite que je peut.
A+
Simple question, Tu sais juste la difficulté de réalisé un code qui te convient pour ton robot ? ^^ et arduino ne fait pas le traitement d'image... Cdt geek maxou
RE tu n'es pas allé sur le lien ? En cherchant dedans tu vas trouver que le module de traitement <<s'accroche>> sur la arduino. Bon après je ne sais pas s'il y a un code complexe derrière et puis le code sera divisé en 5 fonctions plus ou moin simples (seul les codes balle et forme sont complexes du au matériel dont j'ai à peine entendu parlé et le code d'apprentisage qui est complexe mais là c'est ce que je veux) A+