J'ai trouvé ce tuto pour faire, un capteur IR genre sharp GP2D120 en plus simple
Mon lien
je penses le réaliser en cms je vous tiendrais au courant
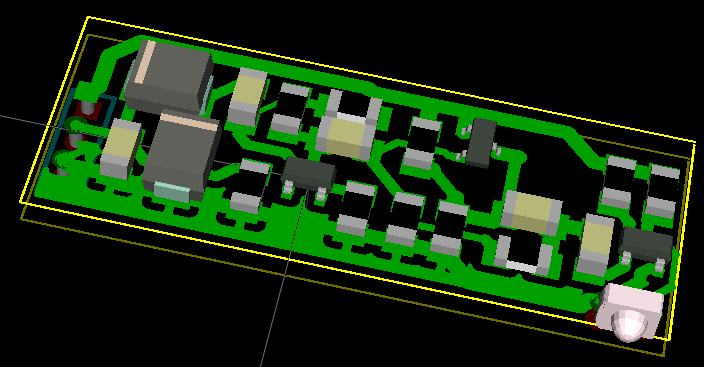
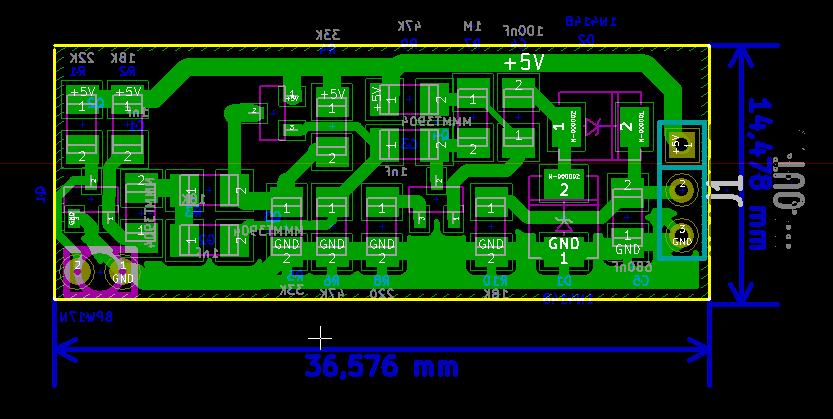
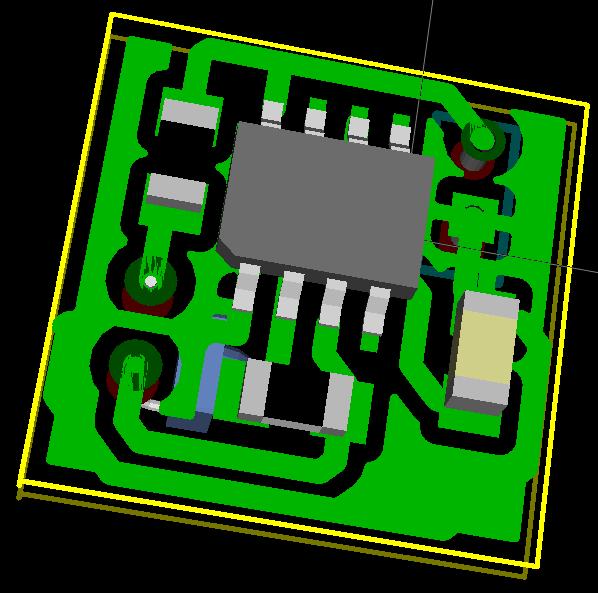
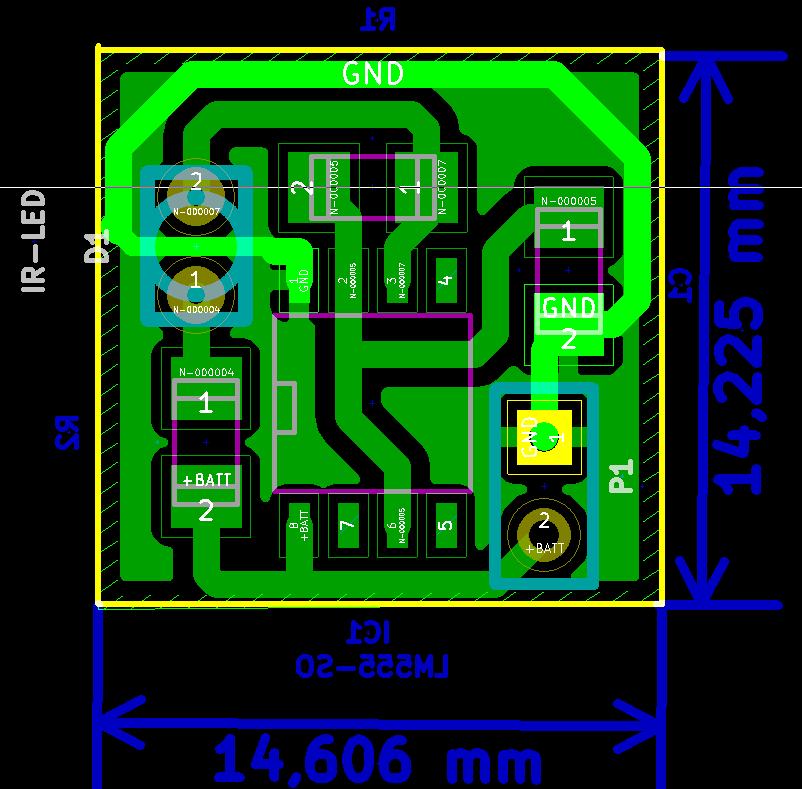
voila je viens de terminer les PCB sous Kicad
j'ai plus qu'à faire les tests

Membre occasionnel

Habitué

Posté 12 avril 2013 - 06:02
Mon site principal : http://www.nagashur.com/ (format blog, un wiki y est aussi)
Mon profil sur hackaday.io : https://hackaday.io/sky99 (hackerspace en anglais, j'y ai plein de projets)
Mon Github : https://github.com/sarinkhan/
Nouveau membre

Posté 29 avril 2013 - 12:47
Membre occasionnel
Posté 27 novembre 2013 - 10:58
Membre passionné

Posté 28 décembre 2013 - 10:55
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)









0 members, 0 guests, 0 anonymous users