salut mike, merci pour ta réponse, je vais alors testé ça mais je crains ( a cause de mon manque dexpérience, je débute lol) avoir pas tout compris se que tu m'explique, je comprend le sens mais pas trop la technique.
je vais regarder un peu en détail les termes que tu me dit sur le net pour voir si je trouve une démarche a suivre. merci encore je sais grasse à toi que ces possible
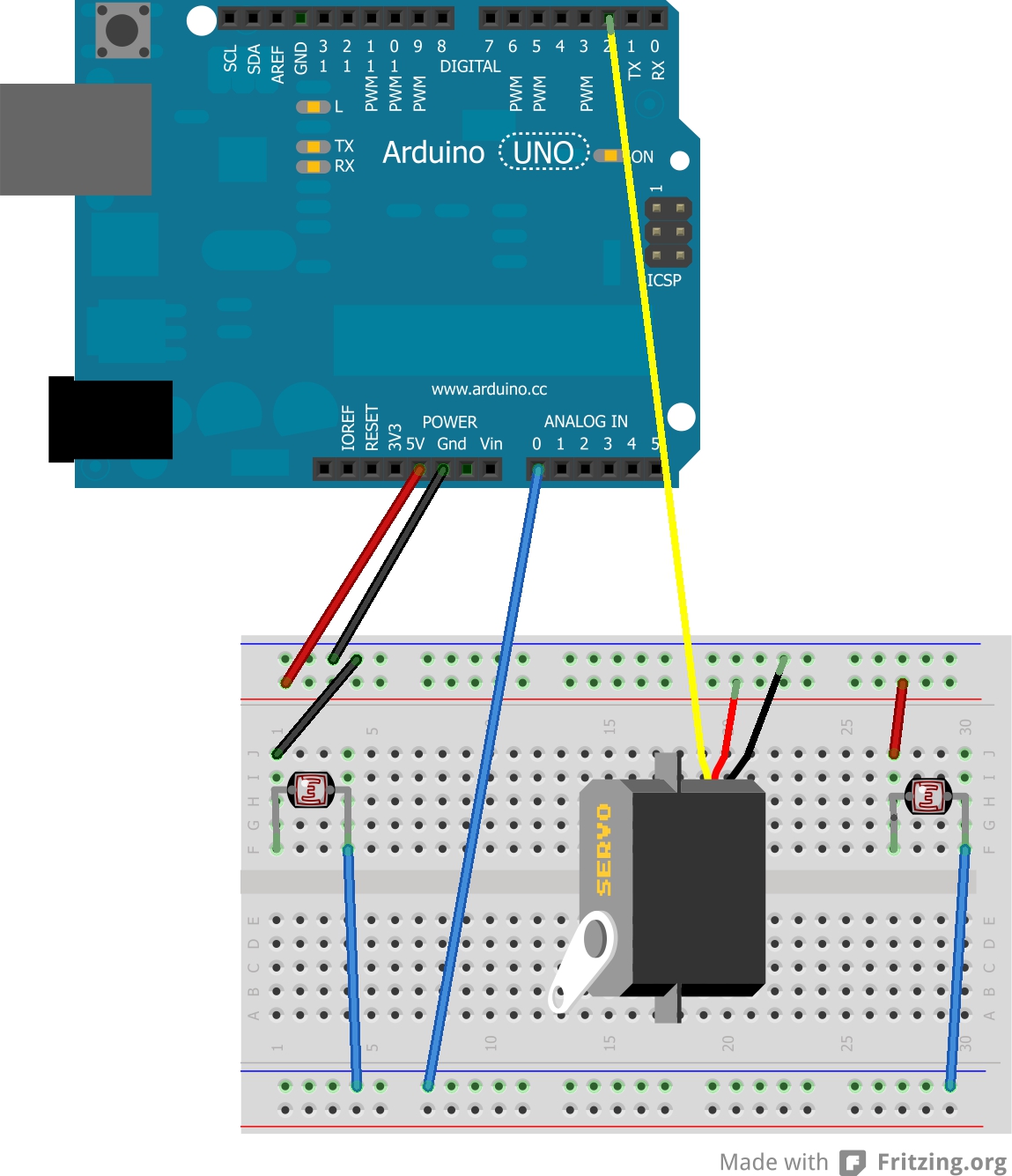
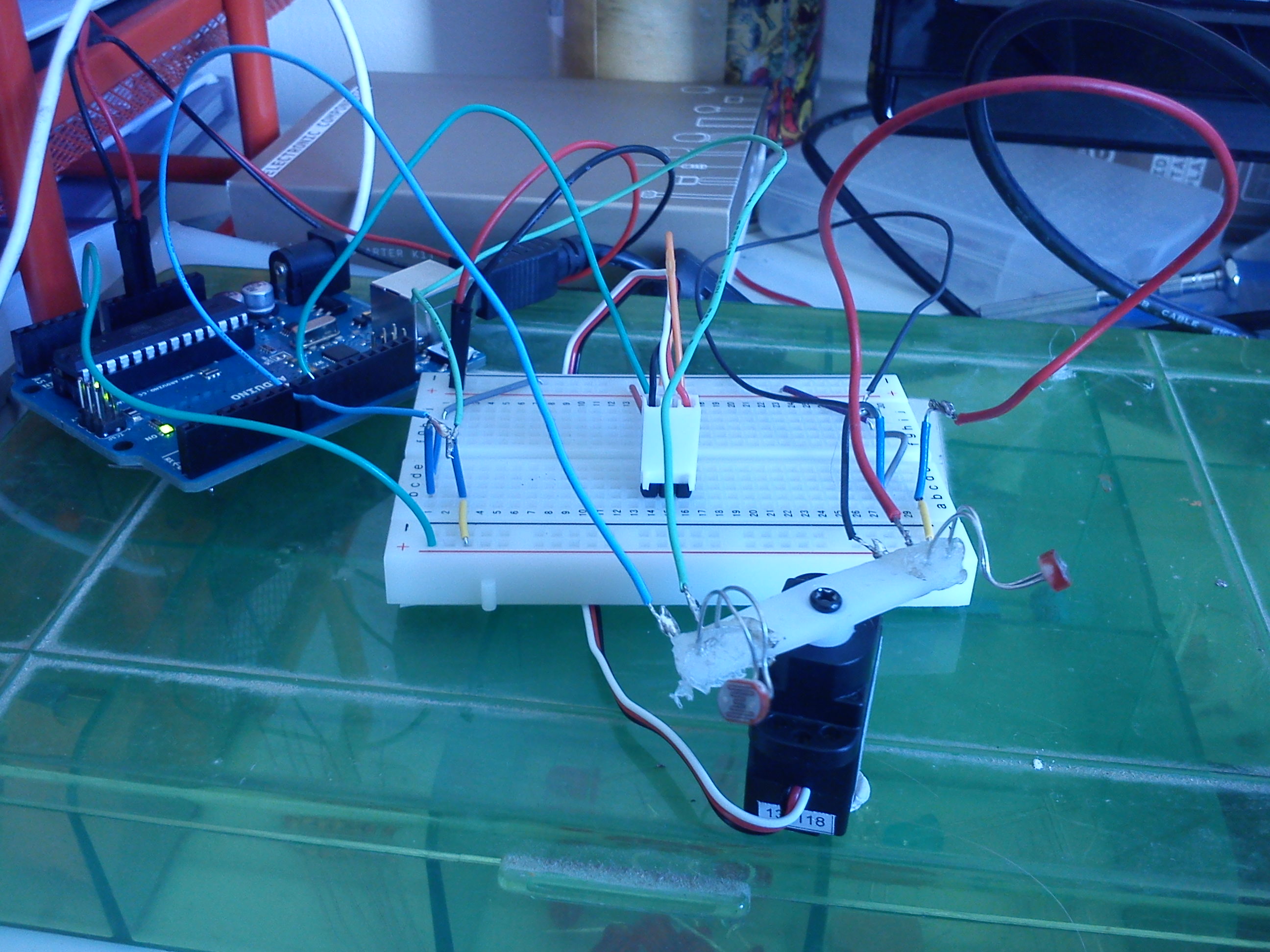
Un pont diviseur de tension avec tes photo-résistances :
chacune de tes photo-résistances à 2 pattes, on va les appeler a1 b1 pour la résistance 1 et a2 b2 pour la résistance 2 ( Tu peux prendre n'importe laquelle des deux pattes pour a ou b car une résistance n'a pas de sens) .
Pour le pont diviseur tu connectes par exemple b1 sur la masse GND b2 sur le 5V et a1 avec a2 ça te fait ton point milieu que tu branche sur la patte analogique de ton choix.
Il ne te reste plus qu'à faire un annalog read pour récupérer la valeur analogique .
ensuite, un photo résistance étant une résistance que varie avec la lumière ( chute de la valeur de la résistance si éclairé ) la valeur de ton pont diviseur va tendre vers 0 si tu éclaire du côté de la résistance 1 ( lié au GND ) ou vers 5V si tu éclaire du côté de la résistance 2 lié au 5V ...
Dernier point : pour le servo :
Pour controller un servo il faut créer un signal crénau de période 20 ms avec un temps haut compris entre 0,9 et 2,1ms a peu près.
un temps haut de 2,1 ms correspondra à une position extrême de ton servo 0,9 à l'autre position extrême ...
Une fonction du type
valeur lue par annalogue read en volt * ( 2,1- 0,9 ) /5 + 0,9 te donnera une fonction qui calcul le temps haut qu'il faut pour mettre le servo en position extremes quand tu eclaires d'un côté ou de l'autre


 />/>, avoir vos idées et vos solutions pour m'aider.
/>/>, avoir vos idées et vos solutions pour m'aider.