Depuis quelques temps je pense de plus en plus à créer mon premier robot. C'est pourquoi je me suis enfin décidée à y réfléchir plus mûrement.
Il s'agira un robot chenillé, pour le moment nommé "Lyra-01".
Son utilité? Pour ce premier robot, simplement me former en autodidacte à la robotique avant de commencer mes années d'Ingénieur civil. Et aussi parce que j'aime beaucoup les robots, et que ça touche à beaucoup de domaines différents.
Le temps que j'aurais à y consacrer? Autant que je le peux, mais je suis à l'université, donc ça dépendra grandement de mes quelques congés, et de mon temps libre.
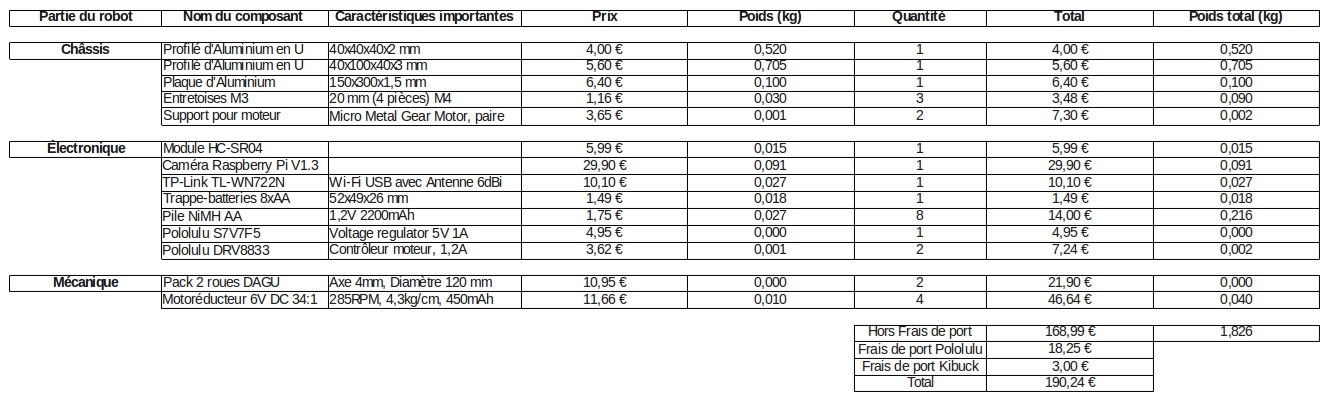
Le coût de ce robot? J'espère ne pas dépasser un coût de 150-200euros (voir même pas plus de 100euros).
J'ai tout de même durant ces quelques semaines pu me renseigner un peu plus, et paufiner ce qui n'était au départ qu'une vague idée de ce que je voulais faire. L'idée est avant tout parti du fait que je voulais chipoter à un peu d'électronique et ait donc acheté une Raspberry pi qui, après avoir un peu chipoté aux leds, a fini par ne plus m'apporter assez de satisfaction.
Je n'ai aucune connaissance en mécanique (si ce n'est de la mécanique théorique...), aucune connaissance en électronique (ou à peine), j'ai un peu de connaissance en programmation C++.
Passons de suite aux bases.
Je m'inspire en partie de divers projets qui m'intéressent beaucoup, notamment celui de Levend. Je n'ai malheureusement pas la bourse, et pas encore les capacités, pour me lancer dans un tel projet, mais ce pourrait être l'optique que j'aimerais prendre lors de mes diverses améliorations/refontes du robot.
A terme j'aimerais m'approcher, dans la conception (pas le prix... :°) de robot tels que le celui du Swat, celui de la Nasa, mais aussi le Dr. Robot Jaguar.
Mais pour la moment, revenons en aux bases.
Partie chassis :
Celui-ci sera en aluminium, pour son aspect, sa résistance, sa (plus ou moins) légèreté.
Je souhaitais partir sur une base telle que celle proposée par Dagu, pour son Wild Thumper 6WD. https://secure.robot...8s8h30vduredf27
La question qui se pose est, est-il préférable de partir tout de suite sur un chassis 6WD, me permettant d'avoir un chassis très évolutif, mais plus "difficile" à réaliser dans un premier temps. Ou partir sur un 4WD, plus simple, plus petit, mais qui me redemandera une refonte complète du chassis si je veux passer à un modèle plus évolué.
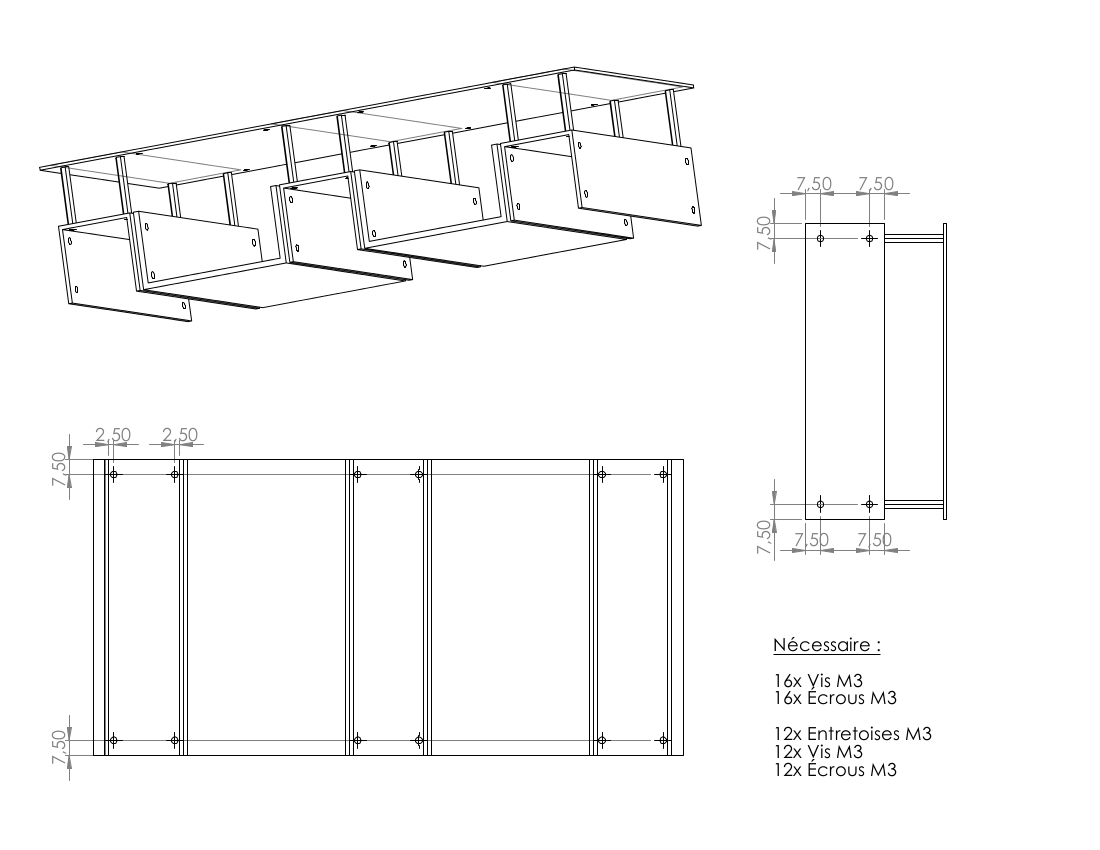
J'aimerais avoir, comme le chassis Dagu, des plaques d'aluminium perforé profilé. Malheureusement tous les sites qui en vendent (en Belgique) n'en vendent qu'aux professionnels, et n'affichent donc pas les prix. Auriez-vous une idée de prix? (voir schéma suivant pour une idée des surfaces nécessaires)
Le chassis fera 300mm de long, pour 150mm de large (chenilles non-comprises) et 50mm de haut.
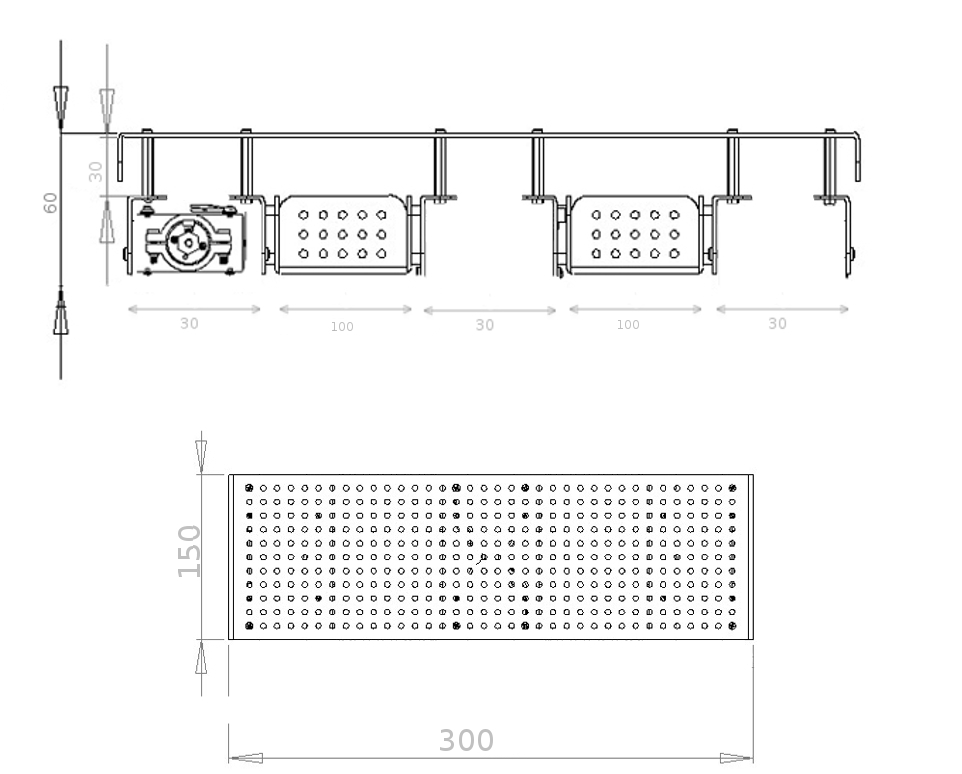
Il me faudrait donc, 2 plaques d'Al perforé (ou non), profilé en U. 6 plaque d'Al perforé (ou non), profilé en L.
1 plaque d'Al perforé (préférable, pour y fixer des modules), profilé ou non, en U. 12 entretoises avec visserie.
De la visserie pour fixer les différentes plaques entre elles, et notamment permettre un espacement de 3mm entre chaque plaque. (à peu près 16vis, 32boulons)
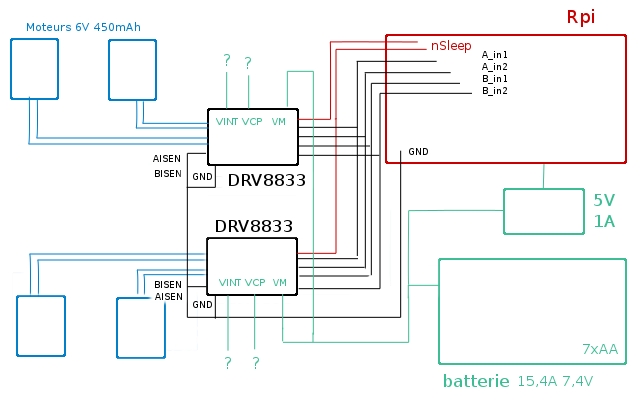
Partie électronique :
Je possède déjà une carte Raspberry Pi, modèle B. Des fils mâle/femelle, mâle/mâle, quelques leds, une sonde de température, des résistances de toutes sortes.
Je devrai probablement acheter:
- Une batterie, il me semble que les LiPo sont assez appréciées, et permettent d'avoir une batterie correcte à moindre coût. Celle-ci conviendrait-elle? Batterie LiPo SFE 3,7V 2000mAh 12.95€ (https://secure.robot...ko1d5vuu0ena396)
- Un chargeur de batterie, 8.95€ (https://secure.robot...ko1d5vuu0ena396)
- Une caméra RPi, environ 25€, je n'ai pas trouvé de fournisseur très recommandé pour cet élément.
- Deux moteurs à courant continu (ou non?), j'ai vu dans un post que ceux-ci étaient conseillés : Moteurs à engrenages cylindriques, 12V, 200RPM. 21.18€ (https://secure.robot...qdkjctem88dckp6)
N'y aurait-il pas moins chers?
J'avais vu ceux-ci : Moteur à engrenages en métal de puissance élevée 150:1, 6V, 200RPM. 14.35€ (https://secure.robot...ko1d5vuu0ena396)
- Un capteur ultrasonique, le HC-Sr04 a l'air assez apprécié et n'est pas fort chers, 3.23€ (https://secure.robot...ko1d5vuu0ena396)
- Une carte de contrôle moteur, j'ai beaucoup vu la L293 D dans mes recherches, mais également la L 298. Je ne sais pas laquelle est préférable. Pour la L 298 il existe deux modèles, je ne sais pas si le modèle le plus basique pourrait convenir dans mon cas.
Le basique : 7.42€ (https://secure.robot...ko1d5vuu0ena396) et le plus évolué : 21.13€ (https://secure.robot...ko1d5vuu0ena396).
- Un module Wi-Fi, environ 20€ je n'ai pas trouvé de fournisseur pour cet élément.
- Sauf erreur, il manque un convertisseur de tension?
Partie mécanique :
La partie qui me pose le plus problème...
J'hésite entre deux types de chenilles.
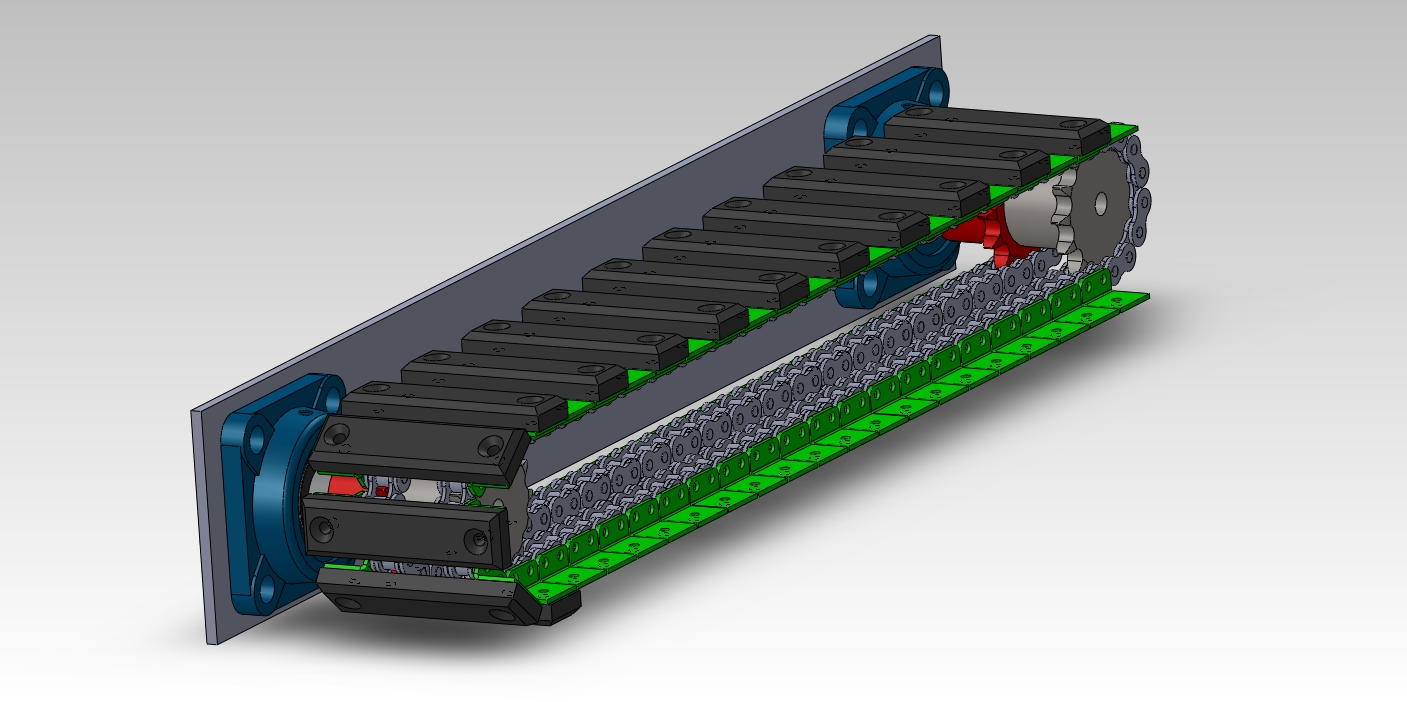
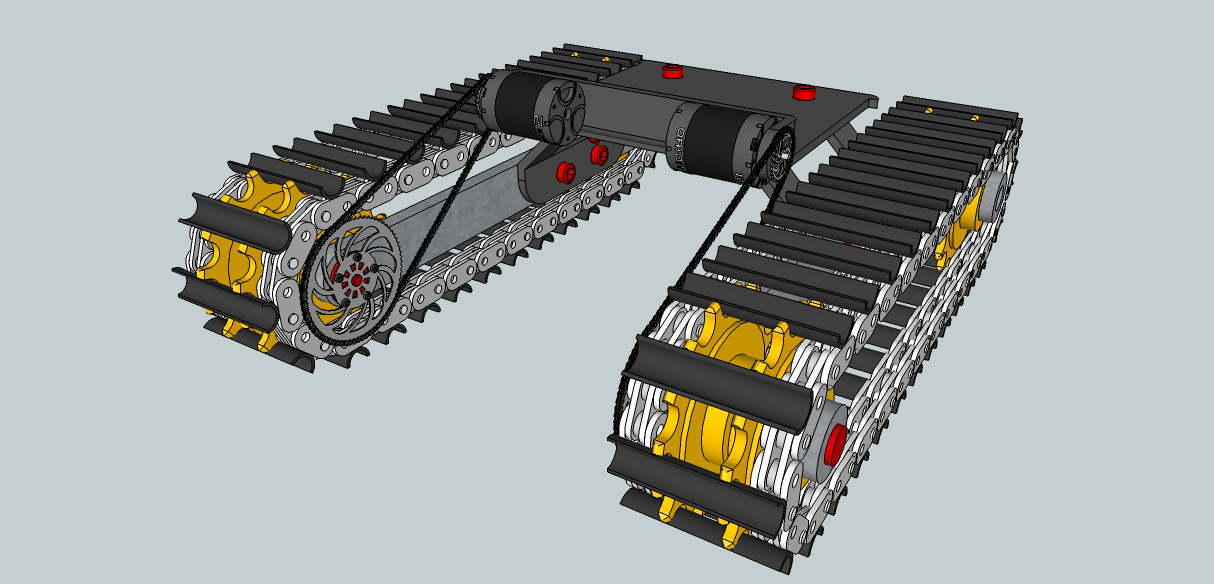
- Le modèle avec des chaînes avec attache en équerre. Lesquelles seraient vissées à une chenille en plastique. Le tout serait actionné par des courroies (une ou deux de chaque coté du robot, et sur chaque axe).
Pour ce modèle, j'ai très peur du prix de revient (et si quelqu'un a une idée, je suis preneuse!), mais la finition serait nettement plus correcte qu'avec des chenilles pré-fabriquées, en plastique dur.
- Le modèle tout fait, avec des chenilles déjà assemblées, en plastique rigide/semi-rigide. Actionnées par des courroies crantées en plastique.
Le prix de revient est probablement moindre, mais la finition n'est, à mon goût, pas des meilleurs.
Pour ce deuxième modèle, j'ai une référence, les chenilles trk-01 de chez Lynxmotion. 22.67€, je ne sais pas si la longeur pourrait convenir...
(https://secure.robot...ko1d5vuu0ena396)
Avec, deux ou quatres (je ne sais pas...) moyeux universels 7.38€/paire (https://secure.robot...qdkjctem88dckp6)
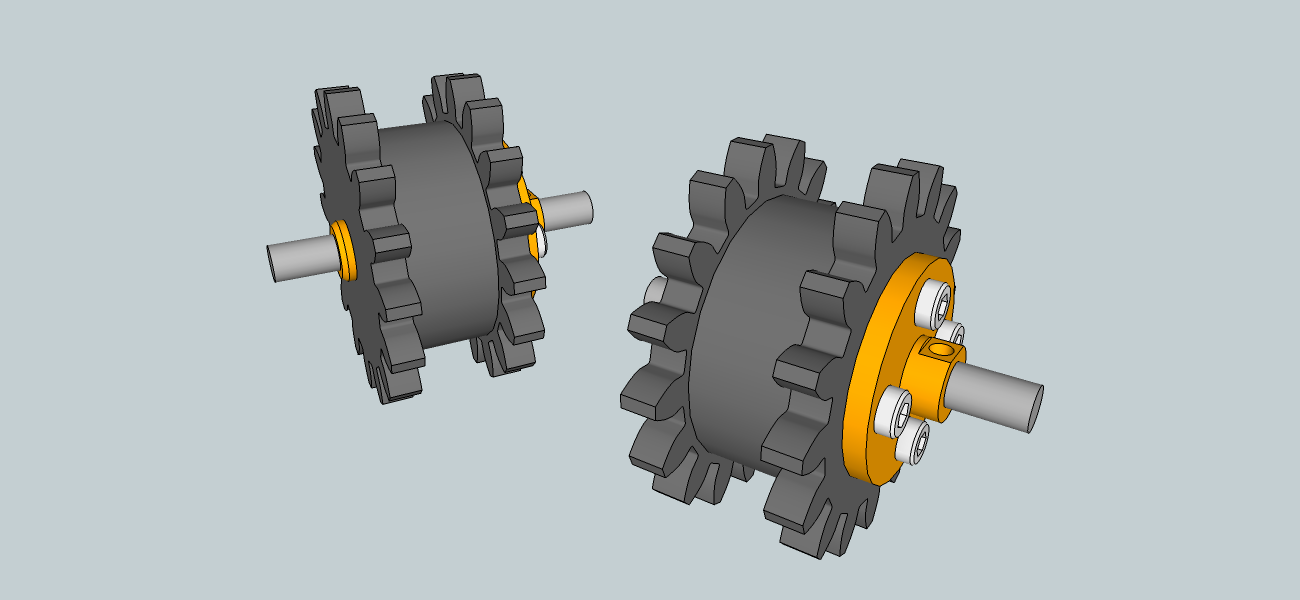
Deux ou quatre pignons à 9dents (je ne sais pas combien il y a en a dans un package) 9.70€/pack (https://secure.robot...qdkjctem88dckp6)
Un pack de support pour moteur 7.75€ (https://secure.robot...qdkjctem88dckp6)
NB : Il faudra probablement corrigé la longeur des modules accueillant les moteurs sur le chassis à 40mm, car ceux-ci font 30mm et ces supports moteurs font 1.5", soit 38.1mm.
J'ai un autre problème, c'est que je ne trouve nul part d'explication sur l'entraînement des roues libres arrières. Comment tournent telles, comment dois-je les fixer? Avec des moyeux universels? Des roulements à billes? Je n'y connais rien et je ne comprends pas comment je vais pouvoir fixer deux roues à l'arrière qui seront alignées à celles à l'avant...
Voilà, c'est un projet assez conséquent, ou du moins j'essaie de le rendre le plus clair, limpide, et précis que possible, pour d'autres qui voudraient le reproduire, et tout simplement pour qu'on sache clairement de quoi on parle.
Merci de votre attention, ce fut long...
 />/>
/>/>