
Bonjour ton projet est très interessant, si tu cherche des idées en structure je connait quelque chose pour des profilés e aluminium si sa t'interesse je peu donner la marque c'est open source en plus (makeblock) tu peu faire plein de chose avec moi j'ai fait mon propre robot avec sa il et encore en cours de dévellopement aucun capteur suis a la parti juste structure base de mon robot si tu veu en savoir plus dit moi j'ai un blog sur mon robot et aussi un site ou je traduit actuellement les schéma en francais des piéces makeblock .

31 réponses à ce sujet
#21

jonat170487
-

- Membres
- 28 messages
Nouveau membre
- Gender:Male
- Location:Château-Thierry
- Interests:Passioné de robotique et nouvelle technologies.
#22
Tsou'
-
- Membres
- 31 messages
Nouveau membre
- Gender:Female
Posté 26 décembre 2013 - 01:47
Merci pour ta proposition, mais je suis en Belgique donc je vais commander les pièces d'alu ici, et comme j'ai déjà fait mes plans, je vais sûrement m'en tenir à ceux-ci...
Je me suis renseignée sur les montages en série et en parllèle, et me suis rendue compte de ma petite (grosse) erreur...
Les piles, misent en série (comme c'est le cas des trappes à piles), vont permettre d'additionner les voltages, mais en aucun cas les ampérages!
En parallèle, c'est l'inverse, les voltages ne sont pas additionnés, mais les ampérages oui.
L'ampérage que je pourrais obtenir ne me convenant pas du tout, je vais me lancer vers une autre solution... Les batteries LiPoly.
J'ai déjà commandé mon dongle wi-fi, ainsi que la caméra Rpi (40euros, sans frais de port sur Amazon). Ca me fait un peu mal de commander pour près de 190euros (dont 30euros de frais de port x_X), mais on dira que je me fais plaisir ce noël-ci.
Je me suis aussi rendue compte d'une bêtise que j'ai dite, le Rpi débitera effectivement un certain voltage en sortie sur le GPIO +5V, si et seulement si il est alimenté via son port micro-usb. A l'inverse, s'il n'est pas alimenté sur le micro-usb, il attendra de recevoir du 5V pour fonctionner.
Je vais l'alimenter ainsi via mon régulateur de tension.
J'ai malheureusement toujours les mêmes questions, comment connecter la batterie? A un simple bornier à vis, via son fil +, duquel sortirait en fait 3fils connectés aux entrées + des contrôleurs moteurs ainsi qu'à celui du régulateur de tension?
L'ensemble des fils - et ground seraint connectés à un même bornier à vis, duquel sortirait un fil vers le ground de la Rpi?
Pour l'alimentation logique des carte contrôleurs moteur, est-ce que je les alimente avec le +3,3V du Rpi? Est-ce qu'il pourra débiter autant, car il y a non pas un mais deux contrôleurs moteur... Je ne comprends pas non plus le rôle de VINT et VCP, essentiels ici.
Je me suis renseignée sur les montages en série et en parllèle, et me suis rendue compte de ma petite (grosse) erreur...
Les piles, misent en série (comme c'est le cas des trappes à piles), vont permettre d'additionner les voltages, mais en aucun cas les ampérages!
En parallèle, c'est l'inverse, les voltages ne sont pas additionnés, mais les ampérages oui.
L'ampérage que je pourrais obtenir ne me convenant pas du tout, je vais me lancer vers une autre solution... Les batteries LiPoly.
J'ai déjà commandé mon dongle wi-fi, ainsi que la caméra Rpi (40euros, sans frais de port sur Amazon). Ca me fait un peu mal de commander pour près de 190euros (dont 30euros de frais de port x_X), mais on dira que je me fais plaisir ce noël-ci.
Je me suis aussi rendue compte d'une bêtise que j'ai dite, le Rpi débitera effectivement un certain voltage en sortie sur le GPIO +5V, si et seulement si il est alimenté via son port micro-usb. A l'inverse, s'il n'est pas alimenté sur le micro-usb, il attendra de recevoir du 5V pour fonctionner.
Je vais l'alimenter ainsi via mon régulateur de tension.
J'ai malheureusement toujours les mêmes questions, comment connecter la batterie? A un simple bornier à vis, via son fil +, duquel sortirait en fait 3fils connectés aux entrées + des contrôleurs moteurs ainsi qu'à celui du régulateur de tension?
L'ensemble des fils - et ground seraint connectés à un même bornier à vis, duquel sortirait un fil vers le ground de la Rpi?
Pour l'alimentation logique des carte contrôleurs moteur, est-ce que je les alimente avec le +3,3V du Rpi? Est-ce qu'il pourra débiter autant, car il y a non pas un mais deux contrôleurs moteur... Je ne comprends pas non plus le rôle de VINT et VCP, essentiels ici.
#23
jonat170487
-
- Membres
- 28 messages
Nouveau membre
- Gender:Male
- Location:Château-Thierry
- Interests:Passioné de robotique et nouvelle technologies.
Posté 27 décembre 2013 - 11:38
Merci pour ta proposition, mais je suis en Belgique donc je vais commander les pièces d'alu ici, et comme j'ai déjà fait mes plans, je vais sûrement m'en tenir à ceux-ci...
Je me suis renseignée sur les montages en série et en parllèle, et me suis rendue compte de ma petite (grosse) erreur...
Les piles, misent en série (comme c'est le cas des trappes à piles), vont permettre d'additionner les voltages, mais en aucun cas les ampérages!
En parallèle, c'est l'inverse, les voltages ne sont pas additionnés, mais les ampérages oui.
L'ampérage que je pourrais obtenir ne me convenant pas du tout, je vais me lancer vers une autre solution... Les batteries LiPoly.
J'ai déjà commandé mon dongle wi-fi, ainsi que la caméra Rpi (40euros, sans frais de port sur Amazon). Ca me fait un peu mal de commander pour près de 190euros (dont 30euros de frais de port x_X), mais on dira que je me fais plaisir ce noël-ci.
Je me suis aussi rendue compte d'une bêtise que j'ai dite, le Rpi débitera effectivement un certain voltage en sortie sur le GPIO +5V, si et seulement si il est alimenté via son port micro-usb. A l'inverse, s'il n'est pas alimenté sur le micro-usb, il attendra de recevoir du 5V pour fonctionner.
Je vais l'alimenter ainsi via mon régulateur de tension.
J'ai malheureusement toujours les mêmes questions, comment connecter la batterie? A un simple bornier à vis, via son fil +, duquel sortirait en fait 3fils connectés aux entrées + des contrôleurs moteurs ainsi qu'à celui du régulateur de tension?
L'ensemble des fils - et ground seraint connectés à un même bornier à vis, duquel sortirait un fil vers le ground de la Rpi?
Pour l'alimentation logique des carte contrôleurs moteur, est-ce que je les alimente avec le +3,3V du Rpi? Est-ce qu'il pourra débiter autant, car il y a non pas un mais deux contrôleurs moteur... Je ne comprends pas non plus le rôle de VINT et VCP, essentiels ici.
J'ai répondu a quelque questions par MP pour ne pas citer mon site et mon blog en public simple fait que j'ai pas envie de faire de la pub ceux qui veulent mon blog irons voir dans ma description de profil .
Jonathan
Mon blog : http://www.tout-sur-la-robotique.blogspot.fr/
#24
sky99
-

- Membres
-

- 271 messages
Habitué
- Gender:Male
Posté 28 décembre 2013 - 10:15
Salut!Merci beaucoup pour ta réponse, très instructive!
C'est un peu long donc je ne vais pas savoir revenir sur certains points, mais j'en ai pris note, et c'est vraiment intéressant d'avoir le raisonnement pour chaque partie (courant pour les moteurs, capacité électronique de la batterie, régulation de tension pour le Rpi, ...).
Effectivement, prendre une batterie de 1A passe encore pour le Rpi, mais 2A pour les quatre moteurs, y'a comme un couac' ...
J'ai donc feuilleté un peu ce qui se faisait comme robot (Let's make robot), et trop peu montrent quel type de batterie ils utilisent. J'ai aussi regardé du coté de ton robot, R. Cerda, et j'ai vu que tu avais utilisé une trappe à piles, solution qui ne m'emballait absolument pas de prime abord. Par la suite, j'ai aussi jeté un coup d'oeil à ton tuto qui était donné en lien (d'ailleurs un grand merci pour ces tutos, c'est par ceux-là que j'ai eu envie de me lancer dans mes différents projets!), et je me suis décidée à approfondir l'idée des trappes à piles.
Soit, ne trouvant pas de batterie brute sur les sites sur lesquels j'allais commander, je pars donc sur une trappe 8xAA, avec des piles AA de 1,2V et 2,2Ah. J'en prendrai 7, pour avoir 8,4V et 15,4Ah. (Les moteurs peuvent aller jusqu'à 9V), si besoin, je peux d'ailleurs toujours diminuer de une pile, soit 7,2V et 13,2Ah. Le Rpi sera alimenté par un S7V7F5, régulateur de tension avec une sortie de 5V et 1A.
Là où ça se corse, et à priori ce devrait être mes dernières hésitations, comment connecter tout ce beau monde? (je parle ici d'un point de vue alimentation en énergie).
Est-ce que je peux simplement utiliser les deux fils de sortie de la trappe (+ et -), les connecter à un domino (bornier à vis), de là, faire sortir six fils, 2 pour la carte régulatrice de tension, et 2 par contrôleur moteur?
J'ai fait un petit schéma, ça aidera peut-être à avoir plus clair...
Comme on peut le voir sur le schéma, je ne comprends pas bien la différence entre VCP et VINT, à priori l'un des deux est l'alimentation logique de la carte (du 5 ou 6V). Mais lequel? Voici la datasheet http://www.pololu.com/file/download/drv8833.pdf?file_id=0J534
Et dernière hésitation, quand on a un seul contrôleur moteur, il n'y a aucun problème au fait de fournir en énergie l'alimentation logique via le Rpi, mais lorqu'on a deux contrôleurs moteurs... Est-ce encore possible? Le Rpi est-il capable de délivrer autant? (Sauf erreur, via son GPIO +5V)
J'ai aussi fait une liste des composants que je vais acheter (qui est enfin descendue en dessous de la barre des 200, grâce à la trappe à piles et aux moteurs moins puissants/>/>/>)
Encore un grand merci
Désolé du délai, j'ai eu plein d'obligations ^^
Alors un point, la combinaison de batteries NiMH (ou autres, en fait).
Si tu combines X batteries de capables de produire 1Ah pour 1.2V chacune, le résultat dépend de la façon d'associer le tout.
Ainsi, en série, tu obtiens un bloc batteries de X*1.2V, mais une puissance de sortie de 1Ah toujours!
Donc avec 8 piles AA de 2200mAh en série, tu obtiens bien la tension mentionnée, mais pas les 12-15Ah que tu espères!
En revanche, si les batteries sont en parallèle, tu peux augmenter la puissance disponible, mais au détriment de la tension:
8 batteries AA de 2200mAh en parallèle donneront 8*2.2Ah soit plus de 16Ah, mais a 1.2V!
En gros, en parallèle, on augmente le courant disponible (ampères), et en série, la tension disponible (volts).
La puissance disponible reste la même dans tous les cas, puisque P=UI, donc (8*1.2V )*2.2A = (8*2.2A) *1.2V.
Une solution serait de faire une combinaison serie-parallèle. Par exemple, deux packs de 6 batteries AA en série, ces deux packs en parallèle.
ça ferait donc 6*1.2V=7.2V, et 4.4Ah disponibles à cette tension. Le montage est relativement simple, c'est juste un peu chiant de recharger toutes ces batteries, à moins d'avoir un chargeur qui prend plein de piles ou 3 chargeurs de 4 piles AA.
A mon sens, la meilleure solution reste une batterie LiPo de type 2S, comprenant 2 cellules lithium en série, donc une tension de 7.4V, et d'en sélectionner une qui fournisse bien 4-6Ah, pour avoir de la marge.
Je ne retrouve plus l'endroit ou j'avais acheté mes batteries lithium polymère, mais pour environ 20, j'avais du 6600mAh en 3.7V. Il faudrait trouver la même en 2S, donc 7.4V.
Le gros avantage, c'est que c'est plus léger, les cellules sont équilibrées, ça fournit beaucoup de puissance pour une masse réduite, mais en revanche, c'est plus cher, et plus fragile.
Pour la recharge, gros point positif : il est possible d'utiliser un circuit spécialisé, qui ne coute presque rien (5-20$) qui permet de gérer la charge de la batterie sans surveillance : on branche un jack et le robot se recharge, sans avoir à démonter quoi que ce soit.
C'est ce que j'ai fait pour version 2.0 de R.Cerda.
Les packs de piles sont cool, car économiques, et on peut faire plein de bêtises sans grand risques, alors qu'en lithium il faut faire gaffe.
Mais c'est clairement une technologie inférieure sur de nombreux points!
Mon site principal : http://www.nagashur.com/ (format blog, un wiki y est aussi)
Mon profil sur hackaday.io : https://hackaday.io/sky99 (hackerspace en anglais, j'y ai plein de projets)
Mon Github : https://github.com/sarinkhan/
#25
Tsou'
-
- Membres
- 31 messages
Nouveau membre
- Gender:Female
Posté 28 décembre 2013 - 10:53
Salut!
Désolé du délai, j'ai eu plein d'obligations ^^
Alors un point, la combinaison de batteries NiMH (ou autres, en fait).
Si tu combines X batteries de capables de produire 1Ah pour 1.2V chacune, le résultat dépend de la façon d'associer le tout.
Ainsi, en série, tu obtiens un bloc batteries de X*1.2V, mais une puissance de sortie de 1Ah toujours!
Donc avec 8 piles AA de 2200mAh en série, tu obtiens bien la tension mentionnée, mais pas les 12-15Ah que tu espères!
En revanche, si les batteries sont en parallèle, tu peux augmenter la puissance disponible, mais au détriment de la tension:
8 batteries AA de 2200mAh en parallèle donneront 8*2.2Ah soit plus de 16Ah, mais a 1.2V!
En gros, en parallèle, on augmente le courant disponible (ampères), et en série, la tension disponible (volts).
La puissance disponible reste la même dans tous les cas, puisque P=UI, donc (8*1.2V )*2.2A = (8*2.2A) *1.2V.
Une solution serait de faire une combinaison serie-parallèle. Par exemple, deux packs de 6 batteries AA en série, ces deux packs en parallèle.
ça ferait donc 6*1.2V=7.2V, et 4.4Ah disponibles à cette tension. Le montage est relativement simple, c'est juste un peu chiant de recharger toutes ces batteries, à moins d'avoir un chargeur qui prend plein de piles ou 3 chargeurs de 4 piles AA.
A mon sens, la meilleure solution reste une batterie LiPo de type 2S, comprenant 2 cellules lithium en série, donc une tension de 7.4V, et d'en sélectionner une qui fournisse bien 4-6Ah, pour avoir de la marge.
Je ne retrouve plus l'endroit ou j'avais acheté mes batteries lithium polymère, mais pour environ 20, j'avais du 6600mAh en 3.7V. Il faudrait trouver la même en 2S, donc 7.4V.
Le gros avantage, c'est que c'est plus léger, les cellules sont équilibrées, ça fournit beaucoup de puissance pour une masse réduite, mais en revanche, c'est plus cher, et plus fragile.
Pour la recharge, gros point positif : il est possible d'utiliser un circuit spécialisé, qui ne coute presque rien (5-20$) qui permet de gérer la charge de la batterie sans surveillance : on branche un jack et le robot se recharge, sans avoir à démonter quoi que ce soit.
C'est ce que j'ai fait pour version 2.0 de R.Cerda.
Les packs de piles sont cool, car économiques, et on peut faire plein de bêtises sans grand risques, alors qu'en lithium il faut faire gaffe.
Mais c'est clairement une technologie inférieure sur de nombreux points!
Salut
/>/>Pas de soucis, tu n'as pas besoin de t'excuser, tu es déjà bien sympa de me conseiller! ^^
Oui je me suis rendue compte de ma bourde dans mon dernier post, donc je vais me diriger vers une batterie LiPoly. Surtout que j'aimerais bien, par la suite, après avoir acquis plus de compétences, partir sur un drone ainsi qu'un hexapode. J'ai trouvé un FabLab sur Bruxelles, donc si je me débrouille assez bien, il y a moyen de faire de chouettes choses! (ils ont une imprimante 3D, des CNC, ...)
/>/>Mes seuls dernières petites hésitations sont de savoir comment brancher tout ça... J'ai peur de faire cramer une partie du matos, et ça me ferait mal de perdre ces sous aussi bêtement ^^'
Pour le contrôleur moteur, je ne comprends pas trop l'intérêt du VINT et VCP. D'ailleurs, il y a de grosses incohérences entre les schémas affiché sur le site de pololu http://www.pololu.com/product/2130 et la datasheet fournie http://www.pololu.com/file/download/drv8833.pdf?file_id=0J534 ... ^^'
Sinon, j'ai aussi un petit doute sur le fait de pouvoir relier l'ensemble des ground entre eux, sur un bornier à vis, lequel serait relié au ground de la Rpi.
Pour le site dont tu parles, il s'agit peut-être de hobbyking?
Il semble avoir des soucis, je n'arrive pasà m'y connecter. Les caractéristiques de la batterie sont : Batterie LiPoly de Turnigy, 5000mAh, 7,4V, 20-30C, 2S, 12,71
Et le chargeur, pour 2S et 3S, connection USB, 3,46. Frais de port pour la Belgique, 8,85.
#26
sky99
-
- Membres
-
- 271 messages
Habitué
- Gender:Male
Posté 30 décembre 2013 - 08:16
Salut
Pas de soucis, tu n'as pas besoin de t'excuser, tu es déjà bien sympa de me conseiller! ^^
Oui je me suis rendue compte de ma bourde dans mon dernier post, donc je vais me diriger vers une batterie LiPoly. Surtout que j'aimerais bien, par la suite, après avoir acquis plus de compétences, partir sur un drone ainsi qu'un hexapode. J'ai trouvé un FabLab sur Bruxelles, donc si je me débrouille assez bien, il y a moyen de faire de chouettes choses! (ils ont une imprimante 3D, des CNC, ...)
Mes seuls dernières petites hésitations sont de savoir comment brancher tout ça... J'ai peur de faire cramer une partie du matos, et ça me ferait mal de perdre ces sous aussi bêtement ^^'
Pour le contrôleur moteur, je ne comprends pas trop l'intérêt du VINT et VCP. D'ailleurs, il y a de grosses incohérences entre les schémas affiché sur le site de pololu http://www.pololu.com/product/2130 et la datasheet fournie http://www.pololu.com/file/download/drv8833.pdf?file_id=0J534 ... ^^'
Sinon, j'ai aussi un petit doute sur le fait de pouvoir relier l'ensemble des ground entre eux, sur un bornier à vis, lequel serait relié au ground de la Rpi.
Pour le site dont tu parles, il s'agit peut-être de hobbyking?
Il semble avoir des soucis, je n'arrive pasà m'y connecter. Les caractéristiques de la batterie sont : Batterie LiPoly de Turnigy, 5000mAh, 7,4V, 20-30C, 2S, 12,71
Et le chargeur, pour 2S et 3S, connection USB, 3,46. Frais de port pour la Belgique, 8,85.
Salut!
Hobyking est en effet blindé de bonnes batteries, le seul problème, c'est de choisir

La batterie que j'utilise c'est celle ci : http://www.seeedstudio.com/depot/lithium-ion-polymer-battery-pack-6a-p-602.html?cPath=1_3
Mais problème, elle est 1S.
L'avantage de chez hobyking, c'est qu'ils vendent des batteries faites pour cet usage. Celle dont tu parles a des caractéristiques très intéréssantes.
5000mAh, donc 5A pendant 1h a 7.4V, donc normalement ça devrait être bon.
Autre point intéréssant, c'est une 20-30C. Cela signifie qu'elle peut fournir jusqu'à 20 à 30 fois cette puissance de 5A si besoin est, en réduisant proportionellement la charge de la batterie. Les classiques sont 1C, donc si données à 1A, elles fournissent 1A max, au dela, elles surchauffent ou se dégradent.
Ici, c'est une 20C, donc en théorie, elle peut sortir 20*5A=100A. Bien sur à ce rythme elle se videra super vite, et de toutes façons j'éviterais ce régime en continu. Mais au moins tu sais que ta batterie ne grillera pas facilement... Maintenant à 100A faut voir si les fils tiennent aussi ^^
Concernant le câblage, en effet, toutes les masses doivent être reliées, et cela ne pose pas de problème particulier. Pour ce qui est du reste, le courant de la batterie arrive quelque part sur ton contrôleur moteurs(généralement Vmotor)
Le principe général est que tu as des GPIO qui indiquent la vitesse souhaitée en PWM au contrôleur, et d'autres pour le sens de rotation. La puce commandera alors des transistors pour balancer le courant Vmotor vers les moteurs, dans le bon sens. C'est généralement assez simple, il suffit de prendre son temps et bien vérifier les branchements. Mais généralement, il suffit de ne pas faire de court circuit, et de ne PAS CONNECTER les GPIO à la partie à haut courant du circuit.
Je regarde les datasheets que tu as envoyé demain pour voir si je peux te donner un coup de main dessus
Au passage, pour faire tes schémas de câblage, tu peux utiliser fritzing, open source et gratuit, sous windows, linux et mac.
Il est bien parceque tu peux faire les circuits en drag' drop, et tu peux visualiser la tête du bidule et aussi montrer ce que tu as prévu
Mon site principal : http://www.nagashur.com/ (format blog, un wiki y est aussi)
Mon profil sur hackaday.io : https://hackaday.io/sky99 (hackerspace en anglais, j'y ai plein de projets)
Mon Github : https://github.com/sarinkhan/
#27
sky99
-
- Membres
-
- 271 messages
Habitué
- Gender:Male
Posté 30 décembre 2013 - 11:24
Salut!
En fait, je ne comprends pas bien le problème de câblage dont tu parles!
Ce schema donne à mon sens tout ce qu'il faut pour câbler les moteur et les GPIO!
La seule chose, c'est que comme tu utilises deux cartes,, alors les mêmes GPIO vont aux deux(
GPIO A et B pour les moteurs avant droit et arriere droit par exemple, et GPIO C et D pour les moteurs avant gauche et arrière gauche).
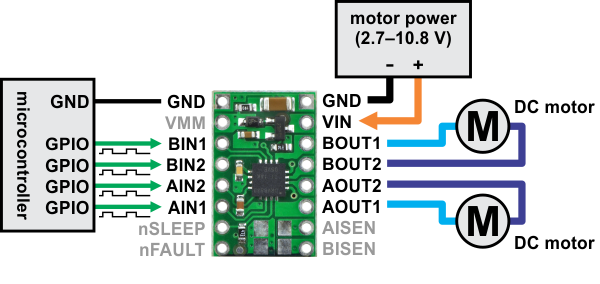
Le Vmotor provient directement de la batterie, et tu ne connectes SURTOUT PAS l'alimentation 5V du pi au+ de la batterie. (sur ton schéma, c'est ce que je vois, à moins que le rectangle vert au dessus de la batterie soit un convertisseur dc-dc?)
En tous cas, le pi reçoit du +5V régulé, propre.
Sur ton schéma, je ne vois pas à quoi correspondent Vint et Vcp, je ne les vois pas sur la carte?
Quand à AISEN et BISEN, ils sont laissés libres, tu n'as pas besoin de t'en occuper.
Tu n'utilises pas non plus VMM, mais juste Vin et GND pour alimenter le motor driver, car il a un circuit pour gérer son alimentation électrique.
Le câblage est ici en fait très simple, il suffit de suivre le schéma de pololu.
En fait, je comprends ton problème sur le câblage maintenant, tu as regardé la datasheet.
Mais celle ci concerne la puce, et te serait utile si tu partais de la puce seule que tu devais intégrer à ton circuit.
Or, ici, tu utilise une carte intégrant la puce avec un peu d'électronique autour. Donc en pratique, hormis par curiosité, le datasheet de la puce ne t'intéresse pas trop, ce qui te sert, ce sont les spécifications de la carte!
Du coup, VCP, VM, etc, bah tu n'a pas à t'en occuper, puisque l'histoire de condensateurs et consorts, c'est géré par la carte.
L'intérêt de la carte c'est justement qu'elle te débarasse de devoir regarder tous ces petits détails.
Pour toi, tu as l'alimentation avec + et -, tu as la sortie des deux moteurs, et les 4 GPIO. le reste ne te sert pas!
En fait, je ne comprends pas bien le problème de câblage dont tu parles!
Ce schema donne à mon sens tout ce qu'il faut pour câbler les moteur et les GPIO!
La seule chose, c'est que comme tu utilises deux cartes,, alors les mêmes GPIO vont aux deux(
GPIO A et B pour les moteurs avant droit et arriere droit par exemple, et GPIO C et D pour les moteurs avant gauche et arrière gauche).
Le Vmotor provient directement de la batterie, et tu ne connectes SURTOUT PAS l'alimentation 5V du pi au+ de la batterie. (sur ton schéma, c'est ce que je vois, à moins que le rectangle vert au dessus de la batterie soit un convertisseur dc-dc?)
En tous cas, le pi reçoit du +5V régulé, propre.
Sur ton schéma, je ne vois pas à quoi correspondent Vint et Vcp, je ne les vois pas sur la carte?
Quand à AISEN et BISEN, ils sont laissés libres, tu n'as pas besoin de t'en occuper.
Tu n'utilises pas non plus VMM, mais juste Vin et GND pour alimenter le motor driver, car il a un circuit pour gérer son alimentation électrique.
Le câblage est ici en fait très simple, il suffit de suivre le schéma de pololu.
En fait, je comprends ton problème sur le câblage maintenant, tu as regardé la datasheet.
Mais celle ci concerne la puce, et te serait utile si tu partais de la puce seule que tu devais intégrer à ton circuit.
Or, ici, tu utilise une carte intégrant la puce avec un peu d'électronique autour. Donc en pratique, hormis par curiosité, le datasheet de la puce ne t'intéresse pas trop, ce qui te sert, ce sont les spécifications de la carte!
Du coup, VCP, VM, etc, bah tu n'a pas à t'en occuper, puisque l'histoire de condensateurs et consorts, c'est géré par la carte.
L'intérêt de la carte c'est justement qu'elle te débarasse de devoir regarder tous ces petits détails.
Pour toi, tu as l'alimentation avec + et -, tu as la sortie des deux moteurs, et les 4 GPIO. le reste ne te sert pas!
Mon site principal : http://www.nagashur.com/ (format blog, un wiki y est aussi)
Mon profil sur hackaday.io : https://hackaday.io/sky99 (hackerspace en anglais, j'y ai plein de projets)
Mon Github : https://github.com/sarinkhan/
#28
Tsou'
-
- Membres
- 31 messages
Nouveau membre
- Gender:Female
Posté 31 décembre 2013 - 12:06
SalutEn fait, je comprends ton problème sur le câblage maintenant, tu as regardé la datasheet.
Mais celle ci concerne la puce, et te serait utile si tu partais de la puce seule que tu devais intégrer à ton circuit.
Or, ici, tu utilise une carte intégrant la puce avec un peu d'électronique autour. Donc en pratique, hormis par curiosité, le datasheet de la puce ne t'intéresse pas trop, ce qui te sert, ce sont les spécifications de la carte!
/>Tu as résolu mon soucis en une phrase! ^^ Je pensais qu'ils s'étaient trompés, étant donné qu'on conseille tout le temps de se fier aux datasheet, je comprends mieux mon erreur, merci!
Effectivement, il s'agissait du régulateur de tension, pour pouvoir envoyer du 5V et 1A.Le Vmotor provient directement de la batterie, et tu ne connectes SURTOUT PAS l'alimentation 5V du pi au+ de la batterie. (sur ton schéma, c'est ce que je vois, à moins que le rectangle vert au dessus de la batterie soit un convertisseur dc-dc?)
Je ferai un schéma plus clair avec le logiciel que tu m'as conseillée, parce que là c'était sous Gimp, qui n'est pas tout à fait approprié... ^^
Pour le prix, c'est la seule qui m'ait semblée vraiment intéressante, parce que l'autre marque B-Grade bien que peu chers a l'air d'avoir pas mal de soucis.L'avantage de chez hobyking, c'est qu'ils vendent des batteries faites pour cet usage. Celle dont tu parles a des caractéristiques très intéréssantes.
5000mAh, donc 5A pendant 1h a 7.4V, donc normalement ça devrait être bon.
Bon bha on dirait que tout est ok alors, je vais pouvoir passer commande à papa-noël! :°
Petit récap' pour ceux que ça intéresse
 />
/>(le capteur HC-SR04 y est mis optionnel... J'ai une autre idée en tête pour faire de la détection d'obstacle avec deux modules IR, en mettant notamment à profit certaines notions de mathématiques, ici, la méthode des moindres carrés)

#29
R1D1
-

- Modérateur
-
- 1â¯212 messages
Modérateur et Membre passionné
- Gender:Male
- Location:Autriche
Posté 31 décembre 2013 - 11:37
(le capteur HC-SR04 y est mis optionnel... J'ai une autre idée en tête pour faire de la détection d'obstacle avec deux modules IR, en mettant notamment à profit certaines notions de mathématiques, ici, la méthode des moindres carrés)
Bip ! Ai-je bien lu "moindres carrés" ? Ca m'intéresse !

Tu veux apprendre de manière supervisée à rester loin des obstacles ? Faire du Braitenberg ? (J'avoue avoir suivi ce topic en survolant, vu que ça parlait beaucoup d'électronique, et quand on survole des posts de plus de 5 lignes, on loupe des trucs ^^).
#30
Tsou'
-
- Membres
- 31 messages
Nouveau membre
- Gender:Female
Posté 19 février 2014 - 03:02
Je reviens après un looong moment. Ta réponse m'a permise de réfléchir sur l'intérêt de mon projet, son utilité et son évolutivité. Bon, entre-temps j'ai aussi eu un blocus et des exams, donc voilà.Bip ! Ai-je bien lu "moindres carrés" ? Ca m'intéresse !
Tu veux apprendre de manière supervisée à rester loin des obstacles ? Faire du Braitenberg ? (J'avoue avoir suivi ce topic en survolant, vu que ça parlait beaucoup d'électronique, et quand on survole des posts de plus de 5 lignes, on loupe des trucs ^^).
Tu as visé dans le mille! Je cherchais quelque chose de ce genre là, permettant de doter le robot de certains comportements et d'évoluer en fonction de son environnement. D'ailleurs, j'ai vu aussi qu'une personne sur le forum avait modélisé des poissons, dotés de certaines caractéristiques, comportements, afin de voir vers quoi tendait le système dans lequel ils évoluaient. J'ai trouvé ça vraiment sympa!
A terme, je souhaitais aussi que mon robot me permette de mettre en application des théories que je vois en cours (dérivation, gradient, méthode des moindres carrés,...), même si j'ai encore du mal à concevoir les moyens d'appliquer ces théories...
Je me rends aussi compte que pour un premier robot, ça fait fort chers. (+/- 200) Mais aussi, qu'il est fort imposant, trop peu modulable et évolutif. Je souhaiterais aussi à terme pouvoir commencer à mettre en application des réseaux de neurones, pour le moment je me renseigne sur ce sujet (si vous avez des liens intéressants, je suis preneuse, j'ai déjà vu le tuto présent ici, mais ça me laisse sur ma faim. ^^)
Je vais donc essayer de faire les choses par étape, tout d'abord concevoir la base roulante en elle-même.
C'est pourquoi je mets en suspend ce projet-ci, qui reverra peut-être le jour par la suite, avec plus de maturité. Et je me lance vers un autre projet, qui pourra sûrement me permettre d'en apprendre tout autant.
Je vais probablement réouvrir un nouveau sujet, pour permettre plus de clarté.
Encore un grand merci à tous pour l'aide apportée sur ce sujet, en espérant que ça serve tout de même à d'autres personnes...
#31
Taupiot_Jr
-

- Membres
-
- 232 messages
Membre occasionnel
- Gender:Male
Posté 19 février 2014 - 02:51
Salut />
Quel dommage d'arrêter maintenant! Cela fait quelques temps que je suis l'avancée de ton projet (qui m'a permis de trouver les chenilles de Lynxmotion entre autre) et je trouvais que tu avancais bien.
Mais bon, je comprend le côté peu évolutif qui t'a fait mettre ton projet en pause, j'ai rencontré la même chose il y a peu...
J'ai une question / suggestion, mais peut être que tu as déjà réfléchi à la chose.. ^^
Pour ton projet suivant tu vas recréer une base roulante?
Dans ce cas, pourquoi ne pas reprendre le travail que tu as déjà fais et en éliminer les aspects négatifs?
/>Quel dommage d'arrêter maintenant! Cela fait quelques temps que je suis l'avancée de ton projet (qui m'a permis de trouver les chenilles de Lynxmotion entre autre) et je trouvais que tu avancais bien.
Mais bon, je comprend le côté peu évolutif qui t'a fait mettre ton projet en pause, j'ai rencontré la même chose il y a peu...
J'ai une question / suggestion, mais peut être que tu as déjà réfléchi à la chose.. ^^
Pour ton projet suivant tu vas recréer une base roulante?
Dans ce cas, pourquoi ne pas reprendre le travail que tu as déjà fais et en éliminer les aspects négatifs?
#32
Tsou'
-
- Membres
- 31 messages
Nouveau membre
- Gender:Female
Posté 20 février 2014 - 12:08
Oui je trouve ça aussi assez dommage d'arrêter ce projet, ou du moins, de le suspendre.
Mais le coût de l'autre base roulante est d'environ 65euros, soit 3fois moins... Et surtout, elle devrait être plus simple à mettre en place, moins ambitieuse et je devrais en apprendre tout autant, si pas plus. Donc il faut savoir remettre en question à un moment donné le bien fondé de son projet./>
Bien sûr si certaines personnes veulent s'en inspirer, sans aucun soucis!
J'y ai pensé, mais c'est assez compliqué, parce que dans ce cas-ci, ce sont les moteurs, les fixations, les roues, le chassis, etc qui coûtaient surtout chers et qui étaient assez costauds. Finalement, vu que je me lance dans un projet de robot 2roues motrices, sur base de plexiglass, autant repartir sur des choses moins chères et pas disproportionnées./>
Mais le coût de l'autre base roulante est d'environ 65euros, soit 3fois moins... Et surtout, elle devrait être plus simple à mettre en place, moins ambitieuse et je devrais en apprendre tout autant, si pas plus. Donc il faut savoir remettre en question à un moment donné le bien fondé de son projet.
/>Bien sûr si certaines personnes veulent s'en inspirer, sans aucun soucis!
J'y ai pensé, mais c'est assez compliqué, parce que dans ce cas-ci, ce sont les moteurs, les fixations, les roues, le chassis, etc qui coûtaient surtout chers et qui étaient assez costauds. Finalement, vu que je me lance dans un projet de robot 2roues motrices, sur base de plexiglass, autant repartir sur des choses moins chères et pas disproportionnées.
/>
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




