
Bonsoir,
Je suis une élève de Terminale et mon groupe et moi avons un projet en sciences de l'ingénieur.
Nous devons créer un robot télécommandé avec 6 roues dont 2 motrices. Ce robot est basé sur celui de la NASA , le robot Curiosity.
La problématique est : En quoi l'environnement a un impact sur sa structure ?
Etant une novice dans ce thème, j'aimerai avoir des conseils sur le type de matériel à utiliser et avoir des astuces.
J'espère que cela ne vous dérange pas !

17 réponses à ce sujet
#2

Tsou'
-

- Membres
- 31 messages
Nouveau membre
- Gender:Female
Posté 16 novembre 2013 - 11:05
Ca ressemble assez fort, pour l'aspect que tu en décris, à mon futur robot. (Qui est bien loin d'être Curiosity, très loin même.)
C'est un 4 roues dont 2 roues motrices. A terme il devrait accueillir 2 roues non-motrices en plus, il suffit de reproduire le système des 2roues non-motrices au module de 30mm central.
Vous pouvez vous en inspirez, j'essaie de détailler, et je continuerai à le faire, un maximum pour qu'il soit le plus accessible possible.
http://www.robot-maker.com/forum/topic/8998-lyra-01/
Toujours est-il que pour avoir des renseignements sur Curiosity, il existe un très bon reportage d'Arte, disponible ici :
Ca pourra très certainement vous aider.
Bon courage pour vos recherches! />
/>
C'est un 4 roues dont 2 roues motrices. A terme il devrait accueillir 2 roues non-motrices en plus, il suffit de reproduire le système des 2roues non-motrices au module de 30mm central.
Vous pouvez vous en inspirez, j'essaie de détailler, et je continuerai à le faire, un maximum pour qu'il soit le plus accessible possible.
http://www.robot-maker.com/forum/topic/8998-lyra-01/
Toujours est-il que pour avoir des renseignements sur Curiosity, il existe un très bon reportage d'Arte, disponible ici :
Ca pourra très certainement vous aider.
Bon courage pour vos recherches!
/>
#3
Microrupteurman
-

- Modérateur
-

- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 17 novembre 2013 - 01:44
Bonsoir,
Je n'y voit aucune utilité, que des inconvenant ! POurquoi ? Et bien simplement parce que tu te trouve avec 4 roue qui n'auront pas la capaciter de passer sur un caillou, ce qui de ce fait, consommera de l'energie inutilement (frotement, roue se bloquant...), autant fair un 4roue dont 2 roue motrice ou un 4x4
Ex : si tu fait un robot exterieur, mieux vaut qu'il soit etanche ! C'est un sujet vaste. (eau, poussieres, radiation, boue, neige...)
avec 6 roues dont 2 motrices
Je n'y voit aucune utilité, que des inconvenant ! POurquoi ? Et bien simplement parce que tu te trouve avec 4 roue qui n'auront pas la capaciter de passer sur un caillou, ce qui de ce fait, consommera de l'energie inutilement (frotement, roue se bloquant...), autant fair un 4roue dont 2 roue motrice ou un 4x4
En quoi l'environnement a un impact sur sa structure
Ex : si tu fait un robot exterieur, mieux vaut qu'il soit etanche ! C'est un sujet vaste. (eau, poussieres, radiation, boue, neige...)
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#4
Lucine
-
- Membres
- 9 messages
Nouveau membre
Posté 18 novembre 2013 - 09:30
Merci beaucoup pour vos réponses. C'est vrai que un robot 4 roues sera plus avantageux.
Sachant que le robot devra passer un obstacle de 10 cm, il veut mieux utiliser un châssis articulé ou avoir des articulations au niveau des roues ( comme le robot Curiosity ) ?
Que me conseillez-vous comme type de moteur et autres matériels ?
Sachant que le robot devra passer un obstacle de 10 cm, il veut mieux utiliser un châssis articulé ou avoir des articulations au niveau des roues ( comme le robot Curiosity ) ?
Que me conseillez-vous comme type de moteur et autres matériels ?
#5
Microrupteurman
-
- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 18 novembre 2013 - 05:22
Je pense qu'un chassis articuler est moin compliquer a mettre en oeuvre et aussi moin couteux.
POur les moteur, cela depend du poid du robot, du type de roue et de leur taille. Mais d'apres moi, 2 roue motrices risque de ne pas etre suffisant.
Comme tu robot sera telecommander, tu peut te passer de microcontrolleur, tu achete (ou recup) une radio 4voie (histoir de pouvoir commander d'autre chose, comme un pan/tilt pour une cam), les controlleur adapteur au moteur, un batterie et c'est tout.
POur les moteur, cela depend du poid du robot, du type de roue et de leur taille. Mais d'apres moi, 2 roue motrices risque de ne pas etre suffisant.
Comme tu robot sera telecommander, tu peut te passer de microcontrolleur, tu achete (ou recup) une radio 4voie (histoir de pouvoir commander d'autre chose, comme un pan/tilt pour une cam), les controlleur adapteur au moteur, un batterie et c'est tout.
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#6
ChristianR
-

- Membres
-
- 474 messages
Habitué
- Gender:Male
- Location:Isère (38)
- Interests:Arduino, programmation, électronique...
Posté 18 novembre 2013 - 11:13
Si la Nasa a monté 6 roues, c'est pour améliorer le franchissement des obstacles

http://laughingsquid.com/nasas-car-sized-curiosity-rover-lands-on-mars/
http://laughingsquid.com/nasas-car-sized-curiosity-rover-lands-on-mars/
Christian
#7
Microrupteurman
-
- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 18 novembre 2013 - 11:34
Je suis tout a fait d'accord, mais le rover Curiosity a 6 roues motrices, notre amie voulait, un rover 6 roue dont 2 motrice .4
Je cite :
"c'est le 22 août que les roues (toutes motrices) ont été testées avec succès"
Je cite :
"c'est le 22 août que les roues (toutes motrices) ont été testées avec succès"
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#10
Lucine
-
- Membres
- 9 messages
Nouveau membre
Posté 02 décembre 2013 - 09:30
Message pour l'avancée du robot :
Partie Méca :
On utilise des legos Mindstorm sur la base du robot Curiosity
Partie électricité :
On a une carte Arduino
On aimerait mettre 4 moteurs dans chaque roue. Sachant que le poid du robot fait entre 500g et 800g et qu'on veut une vitesse de 1cm par seconde, quel moteur serait le plus avantageux ?
Partie Méca :
On utilise des legos Mindstorm sur la base du robot Curiosity
Partie électricité :
On a une carte Arduino
On aimerait mettre 4 moteurs dans chaque roue. Sachant que le poid du robot fait entre 500g et 800g et qu'on veut une vitesse de 1cm par seconde, quel moteur serait le plus avantageux ?
#11
Lucine
-
- Membres
- 9 messages
Nouveau membre
Posté 02 décembre 2013 - 11:42
Enfait,nous utilisons les legos pour une pré-conception.
( photo pour bientôt )
puis nous pensons réaliser les parties fixes en aluminum pour renforcer les angles.
Le robot sera 4 roues motrices pour 6 roues : les deux arrières et les deux avants.
Une batterie 7,4 volts
Une carte Arduino (entre 5 et 12 Volts )
On sait déjà que les moteurs seront dans les roues.
Voilà pour l'avancée !
Nous allons commencer les modélisations avec Solidworks.
( photo pour bientôt )
puis nous pensons réaliser les parties fixes en aluminum pour renforcer les angles.
Le robot sera 4 roues motrices pour 6 roues : les deux arrières et les deux avants.
Une batterie 7,4 volts
Une carte Arduino (entre 5 et 12 Volts )
On sait déjà que les moteurs seront dans les roues.
Voilà pour l'avancée !
Nous allons commencer les modélisations avec Solidworks.
#12
Lucine
-
- Membres
- 9 messages
Nouveau membre
Posté 13 janvier 2014 - 10:59
Avancée du projet :
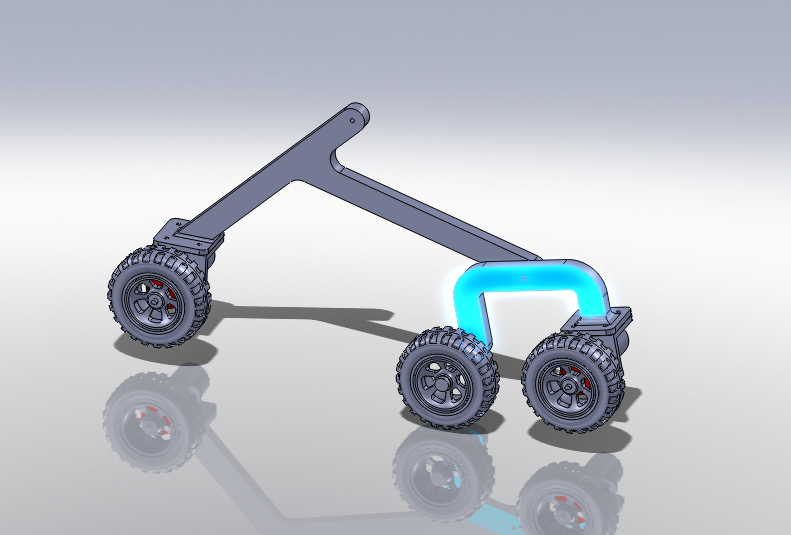
La partie mécanique avance rapidement avec la conception sous Solidworks :
Encore quelques problème avec la partie programmation : Nous voulons utiliser une carte Arduino
Avoir une communication entre le robot et l'utilisateur par onde radio avec une transmission en liaison ponctuel unique.
Voici la photo de la maquette sur Solidworks :
La partie mécanique avance rapidement avec la conception sous Solidworks :
Encore quelques problème avec la partie programmation : Nous voulons utiliser une carte Arduino
Avoir une communication entre le robot et l'utilisateur par onde radio avec une transmission en liaison ponctuel unique.
Voici la photo de la maquette sur Solidworks :
Image(s) jointe(s)
#13
Lucine
-
- Membres
- 9 messages
Nouveau membre
Posté 13 janvier 2014 - 11:18
Bonjours a tous,
On a un problème concernant le moyen de communication entre lutilisateur et le robot afin de piloter le robot à distance.
Nous avons opté pour une solution, les ondes radios (pour cause de simplicité vu le temps accordé au projet : 72 h et il ne nous faut quune liaison unidirectionnelle).
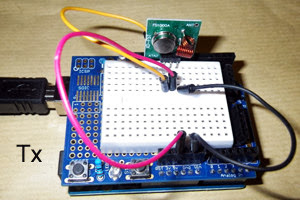
On a voulu commander ça : http://www.gotronic.fr/art-kit-emetteur-recepteur-433mhz-18881.htm
Et nous voudrions piloter notre robot par un ordinateur. Savez-vous comment on pourrait faire pour relier lémetteur au port séries afin de commander l'Arduino qui sera embarqué ?
Merci pour toutes vos réponses
On a un problème concernant le moyen de communication entre lutilisateur et le robot afin de piloter le robot à distance.
Nous avons opté pour une solution, les ondes radios (pour cause de simplicité vu le temps accordé au projet : 72 h et il ne nous faut quune liaison unidirectionnelle).
On a voulu commander ça : http://www.gotronic.fr/art-kit-emetteur-recepteur-433mhz-18881.htm
Et nous voudrions piloter notre robot par un ordinateur. Savez-vous comment on pourrait faire pour relier lémetteur au port séries afin de commander l'Arduino qui sera embarqué ?
Merci pour toutes vos réponses
#14
ChristianR
-
- Membres
-
- 474 messages
Habitué
- Gender:Male
- Location:Isère (38)
- Interests:Arduino, programmation, électronique...
Posté 13 janvier 2014 - 12:07
L'emetteur se connecte au PC avec juste 4 fils à brancher sur la carte Arduino, reliée au PC par son fil USB.
Les commandes se font simplement via le clavier, ou avec Processing si vous voulez une interface plus graphique.
Les commandes se font simplement via le clavier, ou avec Processing si vous voulez une interface plus graphique.
Christian
#15
Lucine
-
- Membres
- 9 messages
Nouveau membre
Posté 13 janvier 2014 - 09:07
D'accord merci beaucoup de ta réponse !
Par conséquent ils nous font donc 2 Arduinos, une pour l'émetteur qui sera reliée au PC et une qui sera embarqué sur le robot pour commander les 4 DC moteurs et le récepteur ?
Nous avons trouver un tuto qui je pense correspond a notre problème : http://www.glacialwanderer.com/hobbyrobotics/?p=291
Par conséquent ils nous font donc 2 Arduinos, une pour l'émetteur qui sera reliée au PC et une qui sera embarqué sur le robot pour commander les 4 DC moteurs et le récepteur ?
Nous avons trouver un tuto qui je pense correspond a notre problème : http://www.glacialwanderer.com/hobbyrobotics/?p=291
#17
olivthill
-

- Membres
-
- 143 messages
Membre occasionnel
- Gender:Male
- Location:Normandie
- Interests:Robots humanoides.
Posté 20 janvier 2014 - 12:57
Le logiciel Phun permet de faire des simulations sur des terrains accidentés.
Je ne m'en suis jamais servi, mais ça a l'air sympa d'après la vidéo qui se trouve au milieu de la page http://www.societyofrobots.com/programming_robot_simulation.shtml
Maintenant, ce logiciel a changé de nom. Il s'appelle Algodoo. Son site est http://www.algodoo.com/
Voici une des videos de démonstration : http://www.youtube.com/watch?v=Fd9W89hpm9U
Je ne m'en suis jamais servi, mais ça a l'air sympa d'après la vidéo qui se trouve au milieu de la page http://www.societyofrobots.com/programming_robot_simulation.shtml
Maintenant, ce logiciel a changé de nom. Il s'appelle Algodoo. Son site est http://www.algodoo.com/
Voici une des videos de démonstration : http://www.youtube.com/watch?v=Fd9W89hpm9U
#18
R1D1
-

- Modérateur
-
- 1â¯212 messages
Modérateur et Membre passionné
- Gender:Male
- Location:Autriche
Posté 20 janvier 2014 - 01:09
Le logiciel Phun permet de faire des simulations sur des terrains accidentés.
Je ne m'en suis jamais servi, mais ça a l'air sympa d'après la vidéo qui se trouve au milieu de la page http://www.societyofrobots.com/programming_robot_simulation.shtml
Euh, je n'appelerai pas ça des simulations ... ça permet de construire des systèmes et de jouer avec les lois de la physique, mais ça n'est pas très réaliste. Et ça ne fera qu'une simulation 1D. Peut-être que ça a évolué depuis que je l'ai testé, mais je doute que ça marche (et si ça marche, je suis curieux du résultat
 ).
).Dans les autres simulateurs, Gazebo est assez complet, mais il gère moyennement les collisions avec les objets. Ca dépend ensuite du but de la simulation : pour des calculs d'efforts, Solidworks le fait très bien.
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




