Merci Sky99 pour toutes tes impressions. Elles posent les bonnes questions et c'est comme ça que je vais avancer. Question budget, ça peut sétaler dans le temps et pour l'instant je n'ai encore rien dépensé
/>/>
La coque : je pensais la faire sur une base daluminium. A paris il y a un fournisseur de matériaux et je je pense que si je le fais en 5 mm dépaisseur renforcé par des cornières carrés toujours en allu ça devrait être bon . Ne sachant pas souder ce matériaux (compliqué et cher) je pense que je visserai les plaques sur une ossature . L'étanchéité sera faite avec de la résine. Pour les trappes de visite ce sera du silicone.
Les ailerons horizontaux devraient servir à faire "planer" le robot durant la descente. Le but étant de filmer et de se balader tranquille. Je ne sais pas quel doit être le poids au cm2 pour que les ailerons soient assez portants , mais ne créant pas trop de traînée. Laileron vertical aura 2 fonctions : la première en haut il y a un flotteur qui fera office de quille à l'envers . Elle donnera la stabilité à l'ensemble, mais effectivement va créer elle aussi de la traînée. C'est aussi pour maffranchir un peu délectronique qui peut tomber en panne. Son 2 éme rôle est lorsqu'il refera surface de pouvoir le localiser plus facilement (leds clignotantes ou couleur fluo ...) et de le récupérer plus facilement (préhension).
Le couplage magnétique : je te rejoins sur ce point car je pense qu'il va poser plus de pb que d'en résoudre.
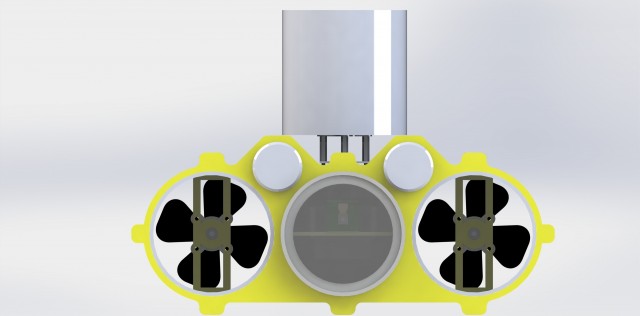
La propulsion : Je pensais à un propulseur assez puissant à l'arrière et 2 ou 3 propulseurs d'étraves pour les autres axes .
Il y a la question de la pression compensée soit à base d'huile ou de gaz. Je n'ai pas assez d'informations déjà de savoir si c'est une bonne idée, et ensuite si c'est faisable et comment et avec quoi. Peut être d'autres forumistes auraient des pistes ??
Merci pour tes idées sur les caméras, je vais regarder de ce côté, ce qu'il se trouve.
Pour mon compte je commence à avoir des idées plus précises grâce à tes interventions. Rien n'est encore figé dans le marbre .
Je vous dis à dans une semaine bien cordialement
La pression compensée est une bonne idée, mais si tu as une coque en alu de 5mm, je pense que ça devrait suffire pour 20m, sans soucis. Bien sur, faudra voir les joints!
Pour la propulsion, c'est plus facile avec deux moteurs excentrés par axe, mais du coup plus cher. Le fait d'avoir des paires de moteurs permet également une symétrie de l'ensemble, donc plus facile à gérer
en terme d'hydrodynamisme (si les forces sont symétriques, on a moins de dérive!)
Avec un seul moteur par axe, on aura de plus la possibilité de monter/descendre selon l'axe, si le moteur est centré, ou de tourner s'il est excentré, alors que la paire de moteurs permet les deux

Pour les joints des trappes, je pense que tu devrais chercher des vrais joints en O à écrasement. Il faudra une surface plane, dans laquelle on grave un sillon qui fait le tour
de l'ouverture, et le "bouchon" possède parfois un sillon similaire.
Le bouchon se visse sur la plaque, à lextérieur du joint. Certes il est possible de mettre soi même du silicone, mais comment s'assurer d'avoir une épaisseur constante?
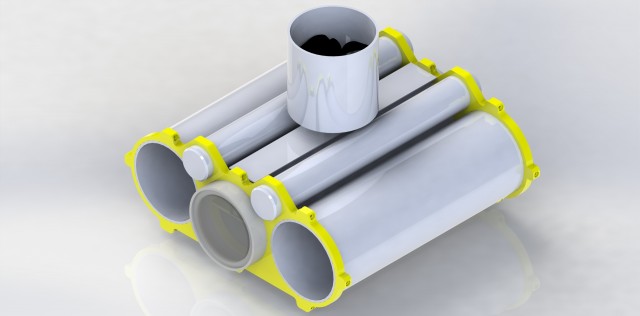
Sinon, je ne sais pas si je l'ai déja dit, mais une bonne solution, c'est les tubes PVC pour canalisation haute pression.
On en trouve de tout plein de diamètres , et en cherchant vite fait j'ai vu des modèles 10,16 et 25 bars. Donc c'est extrêmement costaud, et ça se travaille facilement.
L'avantage, c'est qu'il y a des bouchons dévissables pour ce genre de trucs, avec un joint intégré. ça se perce bien, et ça se colle aussi bien.
Le collage du PVC est en fait une sorte de soudure : la colle dissout une partie du matériau, et en séchant ça soude les deux tubes, de sorte que c'est aussi solide qu'une section normale.
Vu qu'il existe tout plein de raccords standard, ça permet de faire une sorte de meccano géant...